
Kinetix 5500模块的面板集中了大量的有关驱动器的信息,了解这些信息,对于安装和维修都非常有用。驱动器上的控制信号将驱动器之外的检测信号反映到驱动器系统中,如轴位置的反馈(归零或限位)、安全扭矩关断的安全信号探测、电动机编码器反馈、电动机制动的直接连接。
1.Kinetix 5500驱动器模块的面板和顶部
Kinetix 5500驱动器的面板和顶部包括了模块状态灯显示和众多的外部连接端口,如图6-20所示。
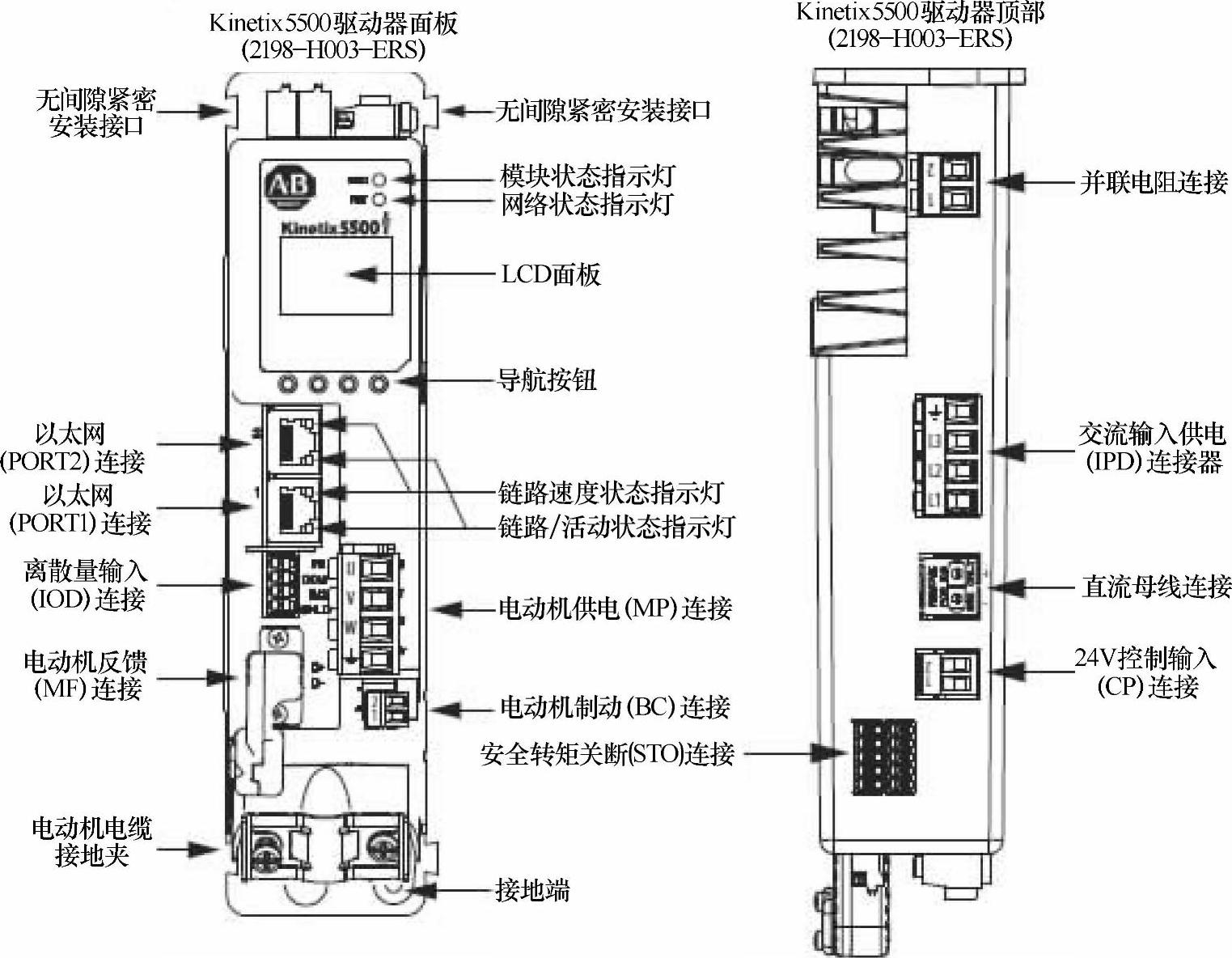
图6-20 驱动器模块面板和顶部
面板和顶部说明如下:
●电动机电缆接地夹 电动机供电、电动机反馈和电动机制动连接的公共接地夹。
●电动机反馈(MF)连接 电动机DSL编码器连接到驱动器的反馈信号端口,连接电缆不能超过50m,系统执行测试将按照此电缆的长度,该限制应用于CE标准的需求。
●离散量输入(IOD)连接 高速的注册/归零位置输入,从低到高或从高到低的触发注册事件,信号是双功能输入,例如一个端子NI1用于注册输入或归零输入。连接器有4个端子NI1、NI2、COM和SHLD,可接入两路离散量信号。典型的应用是信号转变用于建立机器轴的参考位置。
●以太网(PORT1)连接 端口自适应速度和双工模式,与PORT2连通可连接环网DRL,连接长度不超过100m。
●以太网(PORT2)连接 端口自适应速度和双工模式,与PORT1连通可连接环网
DRL,连接长度不超过100m。
●无间隙紧密安装接口 用于前后两个模块之间以啮合的形式紧密扣接。
●模块状态指示灯 指示模块的状态如下:
—熄灭:模块没有上电。
—绿色常亮:驱动器正常运行,没有故障和失败。
—绿色闪烁:等待状态(驱动器尚未组态)。
—红色闪烁:主要可恢复故障,驱动器探测到可恢复故障,例如一个不正确或不合适的组态。
—红色常亮:主要故障,驱动器探测到不可恢复故障。
—红绿交替闪烁:自检,设备上电期间完成的自检过程。
●网络状态指示灯 指示网络的状态如下:
—熄灭:模块没有上电或IP地址没有组态。
—绿色闪烁:驱动器的连接没有建立,但已获得IP地址。
—绿色常亮:驱动器的连接已经建立,运行正常。
—红色闪烁:连接超时,一个或更多的以驱动器为目标的连接超时。
—红色常亮:IP重址,指定的IP地址已经被使用。
—红绿交替闪烁:自检,设备上电期间完成的自检过程。
●LCD面板 显示面板用来监视系统状态、设置网络参数和维修故障,与四个导航按钮配合使用。
●导航按钮 一共4个,根据显示面板菜单的当前内容,导航按钮具有不同的含义。
●链路速度状态指示灯 熄灭为10Mbit/s,常亮为100Mbit/s。
●链路/活动状态指示灯 熄灭为没有链路,常亮为链路建立,闪烁为网络活动。
●电动机供电(MP)连接 驱动器连接到电动机的端口,连接电缆长度不能超过50m,系统执行测试将按照此电缆的长度,该限制应用于CE标准的需求。
●电动机制动(BC)连接 驱动器连接到电动机制动的连接口,电动机制动回路采用的固态切换,需要两个连接端子连接到电动机制动输出,24V直接供电给制动,不需要外接继电器。激活的信号释放电动机制动,接通或断开继电回路由驱动器模块的组态来指定。
●接地端 在为输入供电接线之前,必须决定输入供电连接的类型,驱动器模块被设计成两种不同的运行环境,接地或不接地。
●安全转矩关断(STO)连接 模块响应监视离散量输入触发,安全关断逆变器电源,符合安全条件Category 0停止动作。驱动器支持双重接线的串接相邻驱动器的并联输入终端。如果应用不需要安全关断功能,必须连接跨接线来旁路安全转矩关断特性。
●并联电阻连接 外部并励电阻2097-Rx,在连接外部并励电阻之前,必须在RC连接器上解除内部并行接线。
●交流输入供电(IPD)连接器 驱动器交流主回路(单相或三相)将通过此连接器接入。
●直流母线连接 位于模块顶部的多轴连接的直流母线共享,如果是单轴则无须连接。
●24V控制输入(CP)连接 模块所需要的控制回路输入供电,SELV和PELV额定供电为连接到Kinetix 5500驱动器模块安全输入的外部安全设备提供了能量。
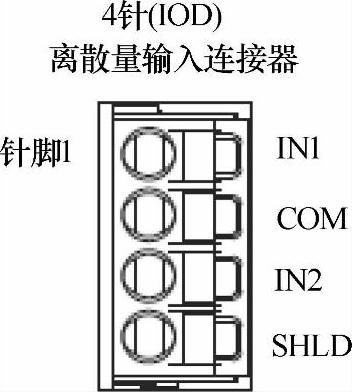
图6-21 离散量连接器
2.离散量输入信号
两个离散量输入信号用来接收IOD连接器上的机器界面信息,离散量输入需要直流24V,15mA的电源供电,它们是汇流输入信号,需要源流设备与之配合。在IOD连接器上为离散量输入提供公共端和电缆屏蔽连接。离散量连接器如图6-21所示。
说明:
●IN1双功能输入 高速注册输入/归零位置输入,从高电平到低电平或从低电平到高电平的信号转换,来触发注册事件。
●IN2注册2高速注册输入,从高电平到低电平或从低电平到高电平的信号转换触发注册事件。
●COM用户供电24V电源的I/O公共地端。
●SHLP I/O电缆屏蔽端。
3.电动机制动继电回路(www.daowen.com)
电动机制动回路使用固态开关,电动机制动输出需要两个连接。连接额定2.0A@24V,24V供电直接作为制动的源,不需要继电器。电动机制动继电回路如图6-22所示。
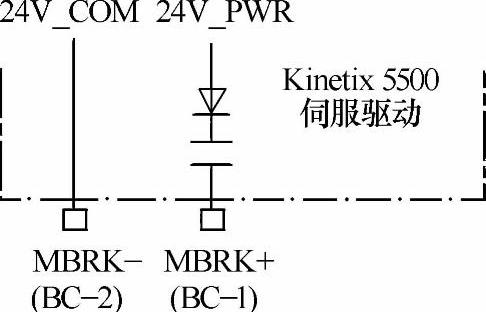
图6-22 电动机制动继电回路
激活的信号释放电动机制动(BC-1和BC-2)。由制动激活继电器或制动禁止继电器来指定接通或断开继电器,这个指定是控制器项目中的组态所决定的。
4.电动机反馈信号
Kinetix 5500驱动器从Stegmann Hiperface伺服链(DSL)编码器接收电动机反馈信号。
Kinetix 5500驱动/电动机组件使用单电动机电缆技术,单电缆包含了电动机电源、反馈和制动接线(当指定时)。反馈和制动接线是屏蔽隔离的,且在电动机电缆夹中各自提供接地的屏蔽绞线带。
驱动器的绝对位置特征跟踪了电动机的位置,驱动器下电时,在内部旋转保留限位。绝对位置特征仅在旋转(-P)编码器可获得,例如,电动机产品目录号为VPL-Bxxxxx-P。
编码器绝动位置如图6-23所示。

图6-23 编码器绝对位置
5.安全转矩关断
安全转矩关断特性提供的方法,失败的可能性非常低,当执行安全转矩关断时,强制电源的晶体管开关的控制信号成为禁止状态。当禁止或安全使能输入失电,所有的驱动器输出电源晶体管开关从On的状态释放,其结果是任何驱动将惯性滑行(停止Category 0)。禁止电源晶体管开关输出不提供电气输出的机械隔离,对于某些应用来说也许是必需的。
正常运行的情况下,安全转矩关断输入处于通电状态,如果两个安全使能输入之一不通电,则所有输出电源晶体管开关将关闭。安全转矩关断响应的时间小于12ms。
Kinetix 5500驱动器能够响应安全停车监视的离散量输入信号,去安全关断逆变器电源的晶体管,与停止安全条件Category 0相符。这些驱动器支持双重接线的串接相邻驱动器的并联输入终端。对于那些不需要安全功能的应用场合,应该安装跨接线来旁路安全转矩关断功能。
安全转矩关断连接器针脚如图6-24所示。
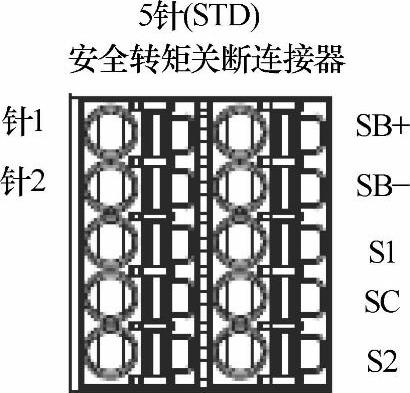
图6-24 安全转矩关断连接器针脚
说明:
●SB+安全旁路正极信号 连接到两个安全输入,以禁止安全转矩关断功能。
●SB-安全旁路负极信号 连接到两个安全公共地端,以禁止安全转矩关断功能。
●S1安全停车输入通道1(SS_IN_CH0)。
●SC安全停车输入公共地端(SCOM)。
●S2安全停车输入通道2(SS_IN_CH1)。
针1和针2(SB+和SB-)用于禁止安全转矩关断功能。当接线到STD连接器,24V供电(触发安全转矩关断的外部安全设备)必须来自外部电源,否则系统施行将处于危险境地。
安全使能输入的状态,将反映在控制器中轴标签数据的状态信息中,作为应用项目中的编程依据。任何一个安全使能输入不激活,控制器中的Axis Guard Status标签的子元素Safe Torque Off Inhibit和Guard Stop Reques Status将置为1。两个安全使能输入在1s内应该不激活,且1s内不激活将防止Guard Stop Input Fault条件成立。
安全使能输入与轴状态信息关系,如图6-25所示。
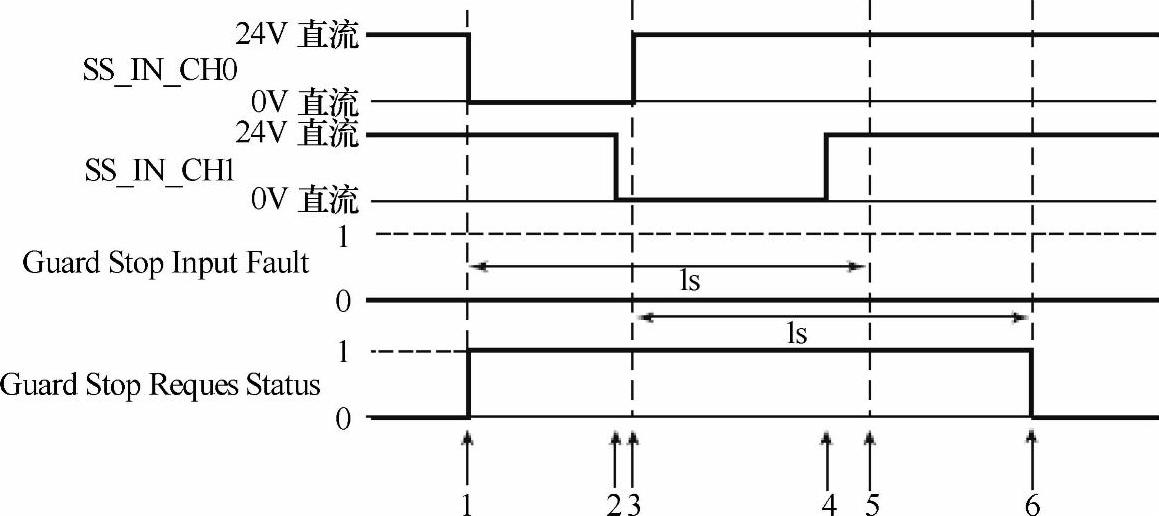
图6-25 安全使能输入与轴状态信息关系
说明:
●1至少一个输入开关关闭,防护停车请求状态位设置为1。
●2第一个开关关闭延时的1s内,第二个输入开关关闭,事件先前已经发生,阻止Guard Stop Input Fault置位。
●3第一个输入开关打开,第二个输入开关仍关闭。
●4第二个输入开关打开,前一次事件还在1s延时内。
●5两个输入同时都是关闭状态,但仍在1s延时内,其结果是,Guard Stop Input Fault不能置1。
●6第一个和第二个的1s延时到达,但两个输入开关均已打开,Guard Stop Reques Status返回0。
当安全转矩关断不匹配被探测时,Guard Stop Input Fault被置位,如图6-26所示。
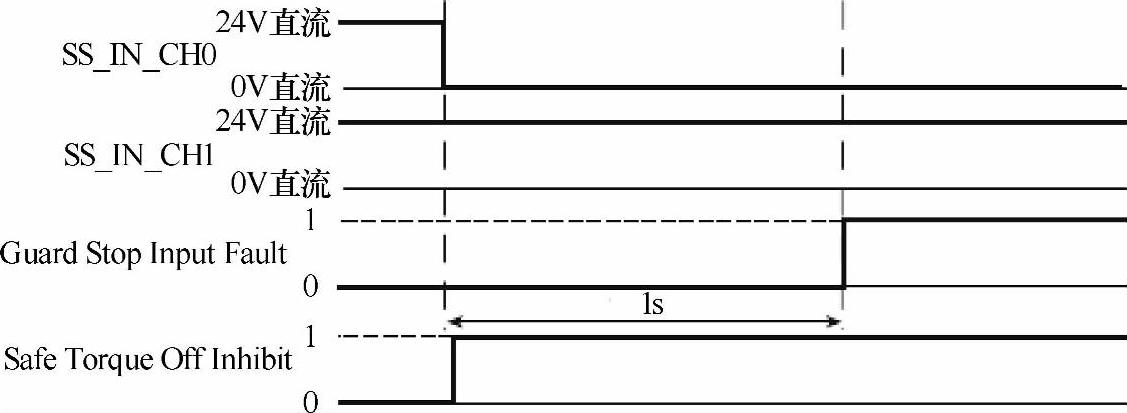
图6-26 安全使能输入不匹配事件的系统运行
第一个安全使能开关关闭,延时1s后,仍然持续关闭,Guard Stop Input Fault置1。
当一个安全使能输入关闭时,第二个安全使能输入必须也关闭,否则被确定为故障。尽管第一个安全输入已打开,还是确定为故障,如图6-27所示。
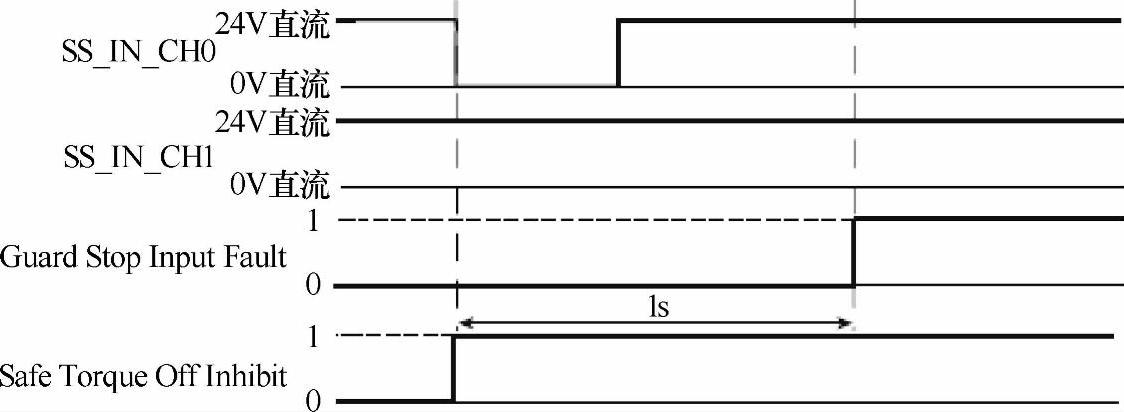
图6-27 安全使能输入不匹配瞬间事件的系统运行
第一个安全输入关闭,第二个始终没有关闭,即使第一个安全输入已经打开,Guard Stop Input Fault延时1s之后仍然置1。
安全转矩关断故障探测在安全转矩关断功能请求之上,在维修之后,安全功能必须执行核实正确操作。
如果两个输入都在关状态,且延时1s之后,安全转矩关断故障才能复位。在故障复位之后,方可满足应用的需求。控制器中的MASR运控命令指令应该发出复位标签Guard Gate Drive Fault的动作。
Guard Stop Input Fault、Guard Stop Reques Status、Safe Torque Off Inhibit和Guard Gate Drive Fault均为控制器中轴标签的子元素,存放BOOL量状态信息。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



