Kinetix 5500驱动器通信端口支持的以太网拓扑结构包括线形拓扑结构、环形拓扑结构和星形拓扑结构。
CompactLogix5370控制器,通过以太网与驱动器通信,实现CIP Motion分布运动控制,不同的控制器型号,支持的连接的容量有所不同。例如,型号1769-L36ERM的控制器,通过EtherNet/IP网络支持集成运控,控制器的特性包含如下:
●支持最多16个轴。
●在线形组态中支持最多48台设备。
●双端口的连通性支持环形网络(DLR)的拓扑结构。
1.线形拓扑结构
这种结构所有的设备连接在线形拓扑结构中,Kinetix 5500模块的端口包含了双端口连通性,网络电缆从一个端口连入,另一个端口连出,显然,如果任何一个设备变成未连接状态,网络上所有的设备会因此而不能通信。没有双端口的设备应该通过1783-ETAP模块连接到以太网上,或连接在线形网络结构的末端,如本例中的Logix编程计算机和PanelViewPlus,被接在网络的末端,因而不需要1783-ETAP模块。线形网络结构如图6-9所示。
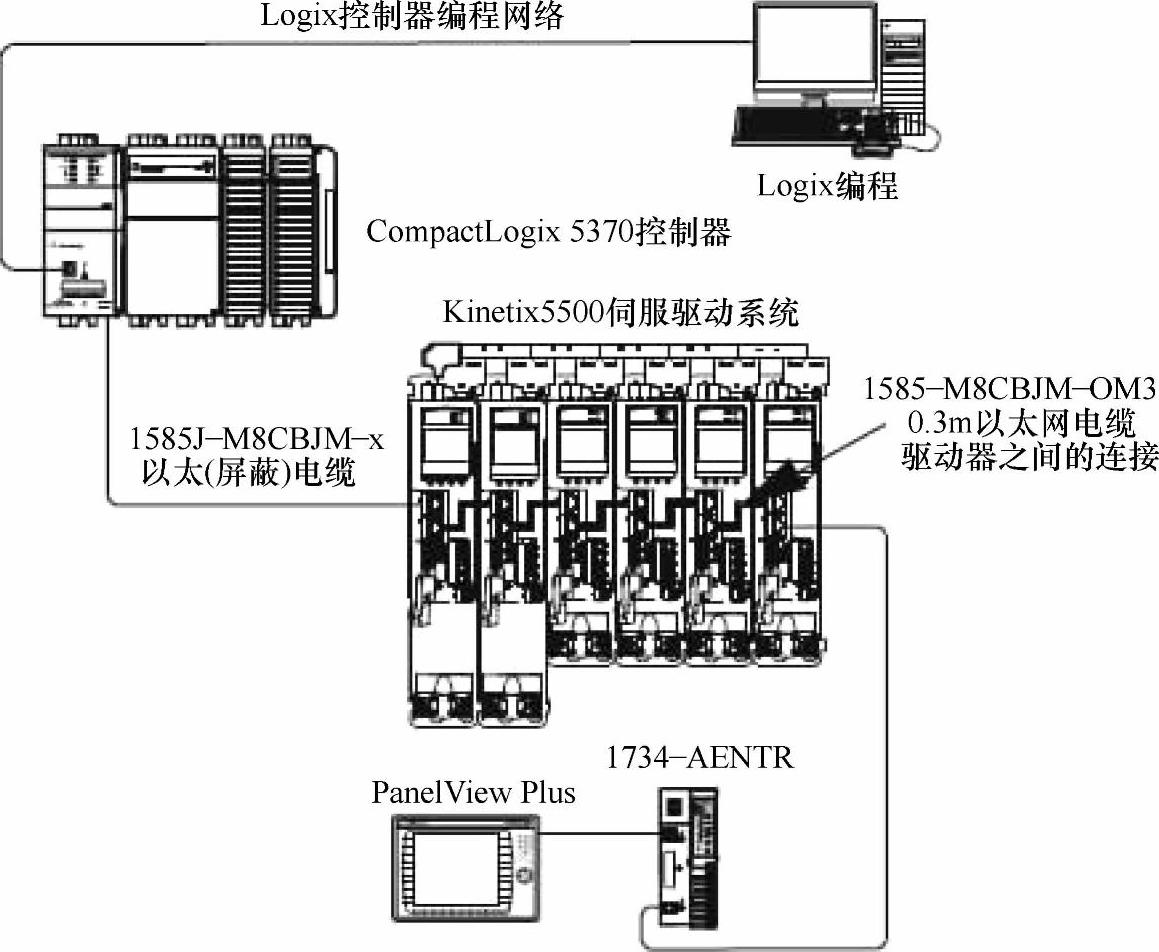
图6-9 线形网络结构(www.daowen.com)
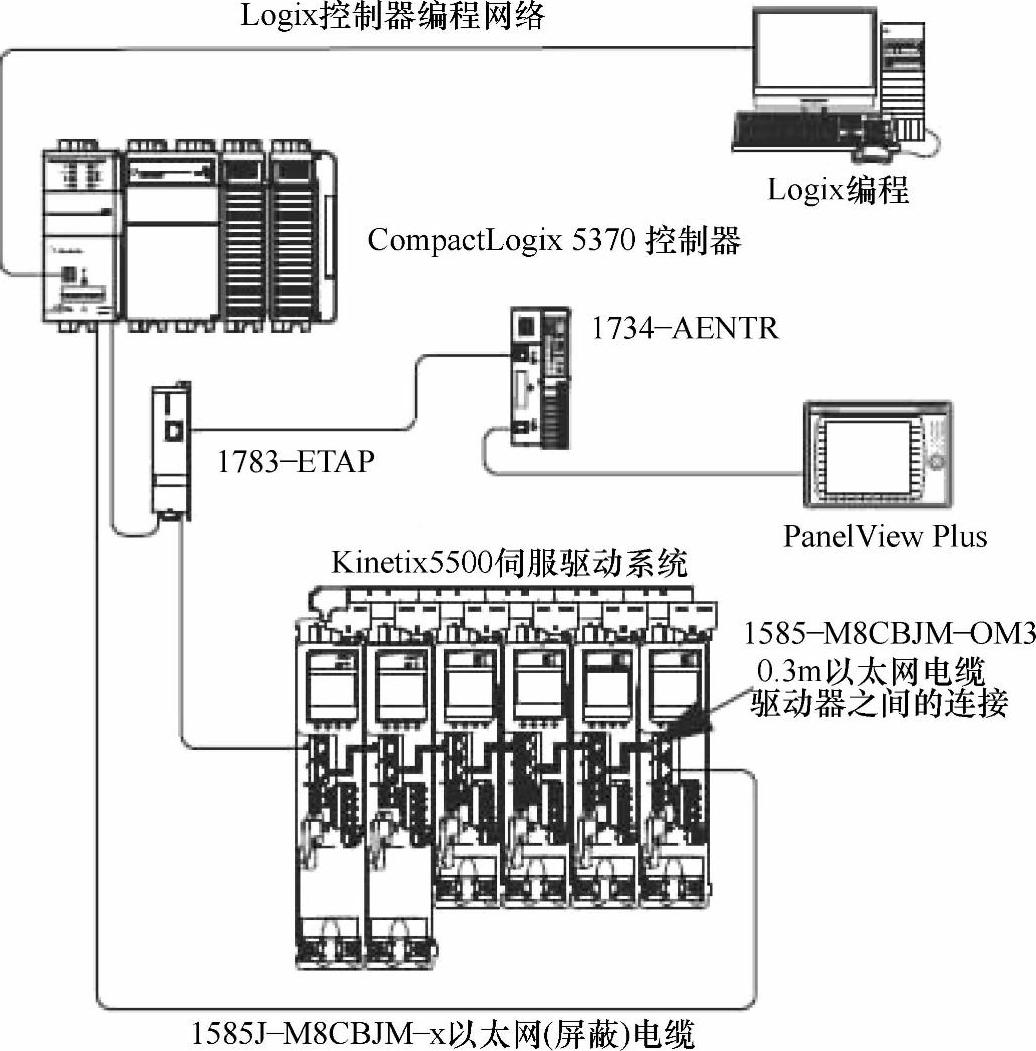
图6-10 环形网络结构
2.环形拓扑结构
用环形拓扑网络连接设备,构成闭环,Kinetix 5500模块的端口包含了双端口连通性,网络电缆从一个端口连入,另一个端口连出,如果环形网络中仅一个设备处在未连接状态,环形网络转为线形网络,闲置设备成为线形网络的末端设备,网络保持连续通信。为保证环形拓扑网络正确工作,设备级环形网络需要网络管理者(如1783-ETAP模块)进行管理。环形网DLR是ODVA标准。环形网络结构如图6-10所示。
3.星形拓扑结构
用星形拓扑结构连接设备,网络上的每台设备直接连接到交换机。Kinetix 5500驱动器和其他设备都是独立运行的。一台设备的通信丢失不会影响其他设备的运行。星形网络结构如图6-11所示。
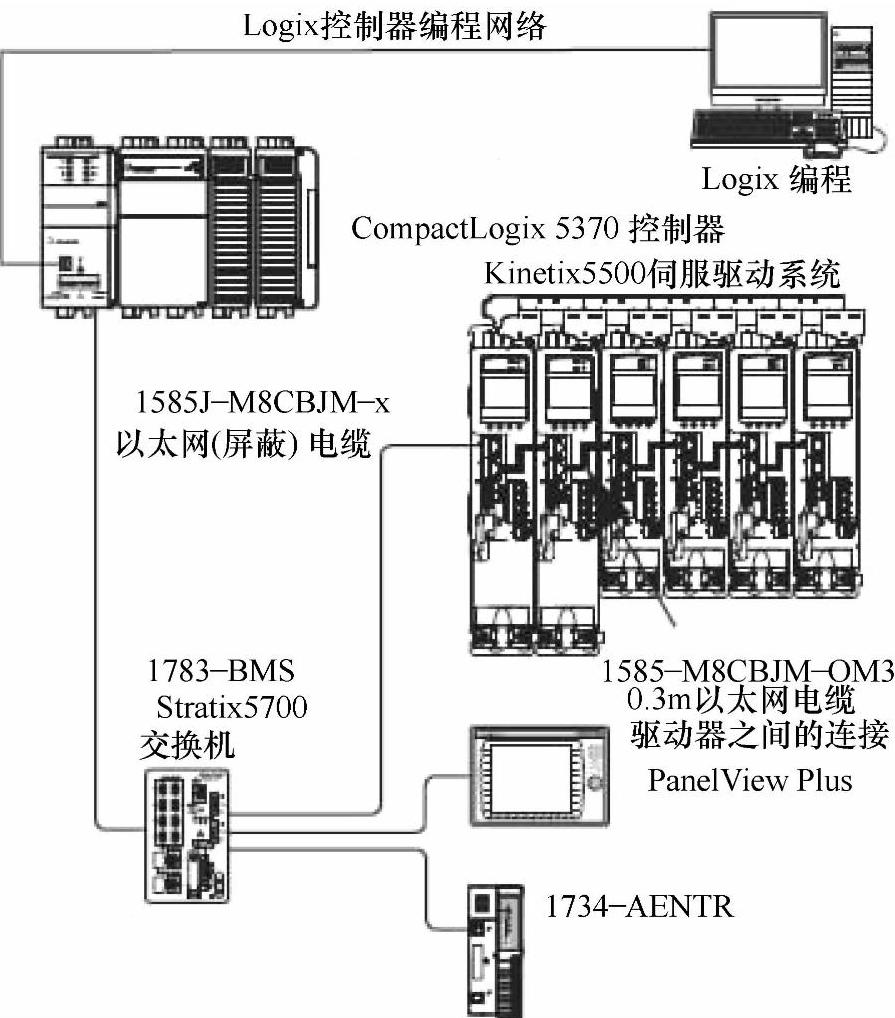
图6-11 星形网络结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






