Kinetix 5500伺服驱动系统的硬件组态是运动控制系统的设备基础,由驱动器、电缆套件和其他附件构成,正确选择合适的组件搭接系统,是完善运动控制系统的基本保证。
Kinetix 5500伺服系统的组件简介:
●Kinetix 5500伺服驱动,型号2198-Hxxx-ERS,200V等级(单相或三相)和400V等级(三相),驱动器可以运行在独立轴,以及共享交流、共享直流、共享交流/直流和共享交流/直流混合组态的多轴。模块可以无间隙地紧凑安装,并在多轴组态时使用共享母线连接系统以扩展电源。
●Kinetix 5500电容模块,型号2198-CAPMOD-1300,用于能量储存和/或改善应用性能,产生再生能量和短暂供电(1360μF)。模块可以与伺服设备并排无间隙地紧凑安装,并使用共享母线连接系统以扩展电源。
●共享母线连接器套件,型号2198-H040-x-x,输入接线连接器和直流母线T形连接器,用于框架1和框架2的伺服驱动;型号2198-H070-x-x,输入接线连接器和直流母线T形连接器,用于框架3的伺服驱动。
●反馈连接器套件,型号2198-KITCON-DSL,用2针连接器插头和接地镀电板框可替代反馈连接器套件。
●I/O连接器套件,型号2198-KITCON-IOSP,用于I/O(IOD)连接器的I/O连接器弹簧夹套件;型号2198-KITCON-IOSC,用于I/O(IOD)连接器的I/O连接器螺钉端子套件。
●连接器配套,型号2198-KITCON-PWR40,40A,用于框架1和框架2的伺服驱动;型号2198-KITCON-PWR70,70A,用于框架3的伺服驱动。
●Logix控制器平台,具有EtherNet/IP网络集成运控的CompactLogix 5370控制器和Con-trolLogix 1756-7x控制器,支持线形、环形和星形网络拓扑结构。
●编程软件21版本以上Studio 5000,为CompactLogix 5370控制器和ControlLogix 1756-7x控制器及伺服模块提供编程、组态和维护维修。
●兼容电动机,型号VPL-Axxxx和VPL-Bxxxx,兼容旋转电动机包括了200V和400V等级的Kinetix VP(Bulletin VPL)低惯量伺服电动机。
●电缆,型号2090-CSxM1DF-xxAAxx,用于电动机电源、反馈和24V直流制动电源的Bulletin 2090单电缆;型号158J-M8CBJM-x,具有标准长度的以太网络电缆,建议使用屏蔽电缆。
●交流滤波器,型号2198-DB08-F、2198-DB20-F和2198-DB42-F,Bulletin 2198三相交流滤波器,当Kinetix 5500驱动系统需要满足CE标准和有效运用时选用。
●24V直流电源,型号1606-XLxxx,Bulletin 160624V直流电源,为控制回路、离散量输入、安全设备和电动机制动供电。
●外部并联电阻,型号2097-R6和2097-R7,Bulletin 2097外接电阻,用于当驱动器的内部并励能力超过时。
1.独立组态
独立组态是最基本的单轴驱动系统组态,简单的供电结构和电动机连接,没有共享母线的扩展连接。也是多轴驱动系统的基础。
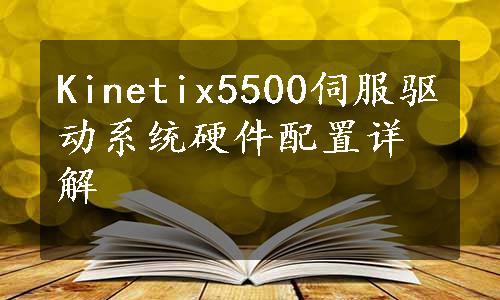
驱动模块的供电由交流(单相或三相)供电回路,含有回路熔断器,用隔离开关控制交流回路的接通和断开。如果应用需要满足CE标准,或是保证稳定的交流供电,可以选择使用交流滤波器。外接的24V直流电源,为控制回路、离散量输入、安全设备和电动机制动供电。驱动器的供电系统如图6-1所示。
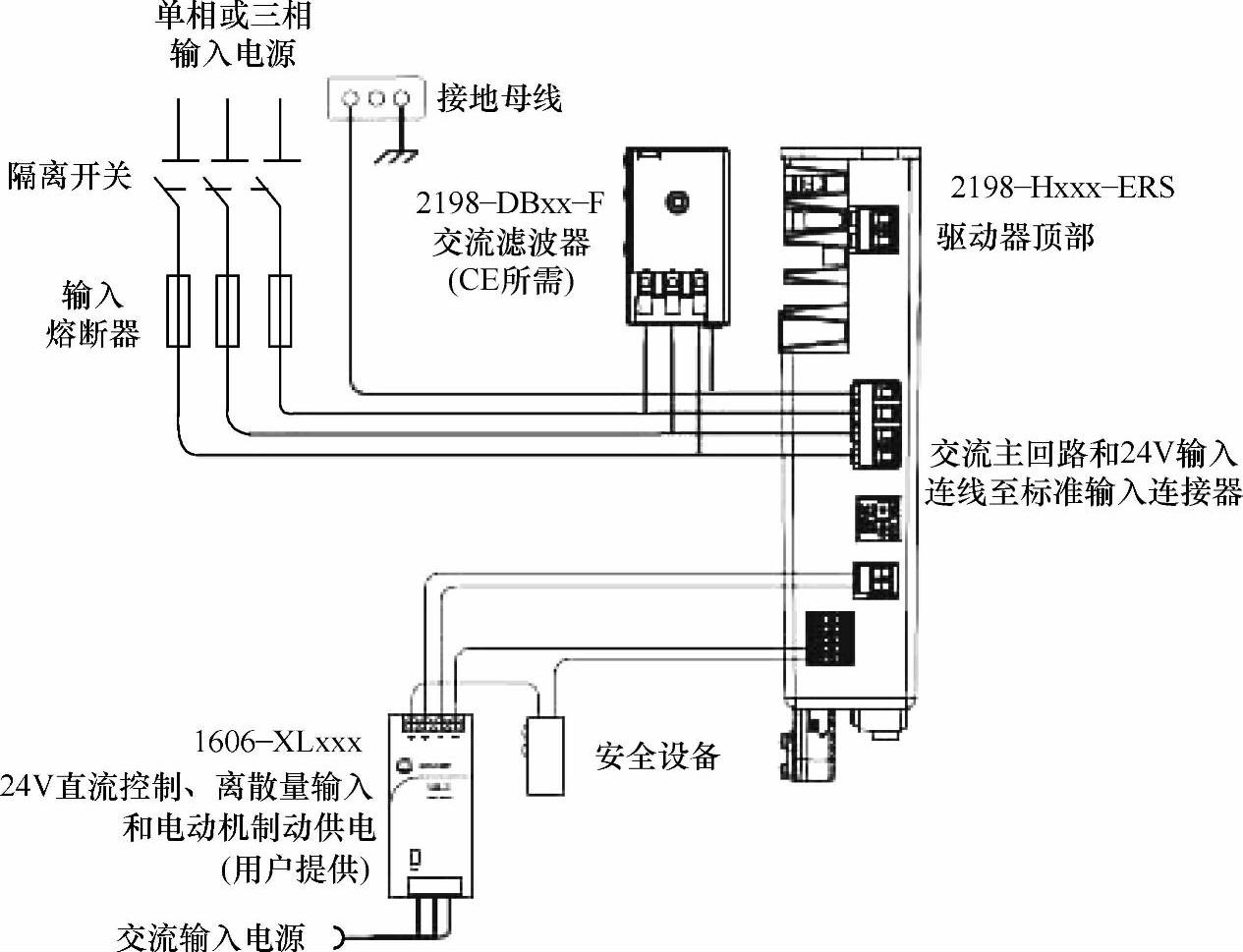
图6-1 驱动器的供电系统
在伺服模块顶部,还有两路共享连接:共享24V电源和共享的直流公共母线,如图6-2所示。
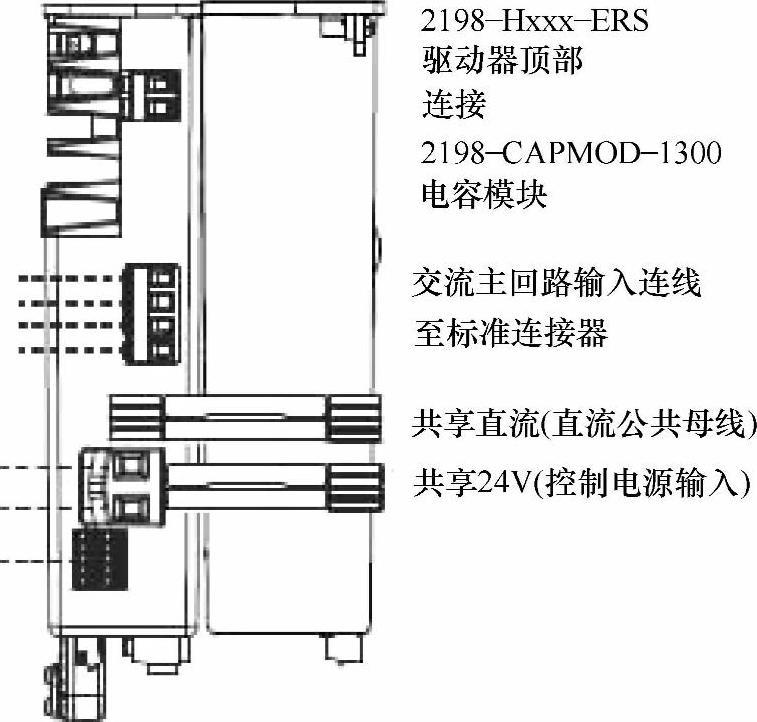
图6-2 共享24V电源和共享的直流公共母线
从伺服模块面板,连接到电动机的电缆2090-CSxM1DF-xxAAxx,含有驱动电动机的供电输出电缆、电动机反馈电缆和电动机制动电缆,以及电动机的接地。离散量输入是来自轴位置的测量信号,从而建立轴的参考位置,其信号来源是感应位置的传感器或控制的信号串,如图6-3所示。
如果多轴伺服系统需要连接共享母线,为多个模块提供交流供电,可使用共享母线连接器套件2198-H0x0-x-x来连接。如果内部并励电阻可用能力超出时,还可以使用外接并励电阻,如图6-4所示。(www.daowen.com)
图6-3 电动机连接和控制信号
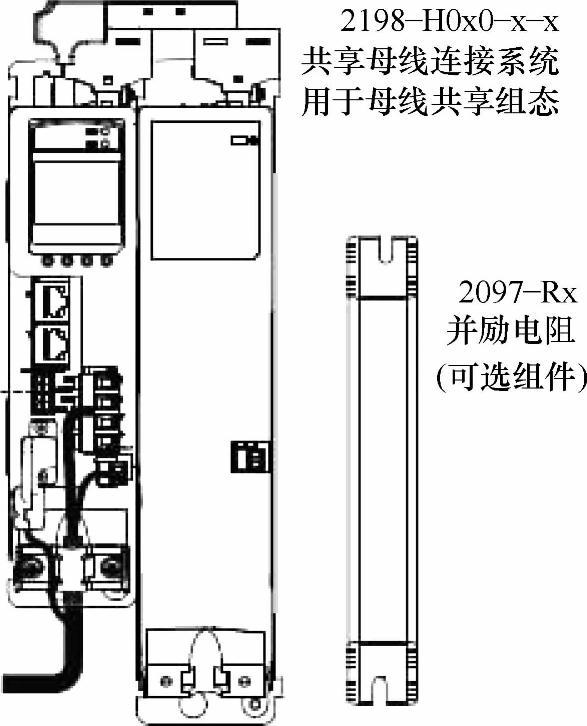
图6-4 共享母线和外接并励电阻
2.典型共享交流组态
应用需求的多轴系统,需要多个伺服模块来支持,伺服模块的安装无间隙紧密相扣,模块的交流供电通过共享母线来连接。图6-5所示的例子是5个轴的伺服模块共享交流母线,每个模块独立外接各自的电动机,甚至电动机可以是不同的型号,这可以通过每个伺服模块的组态来区分。
在共享交流组态中,所有伺服模块的额定功率必须是相同的,共享交流组态不支持电容模块。
3.共享交流/直流组态
图6-6所示的例子是4个共享交流和共享直流的伺服模块组态,通过共享交流母线令每个伺服模块的交流共享,同时也通过共享直流母线将模块共享的直流连接在一起,直流共享还包括了电容模块在内的连接,电容模块在供电期间充电储存能量,在直流断开时提供短暂的供电,保证某些必要的需求。
在共享交流/直流组态,所有的伺服模块的额定功率必须是相同的。
4.共享直流公共母线组态
在多轴系统的例子中,还可以采用共享直流公共母线的组态,即一个直流公共母线上的主驱动器(源)接收三相交流输入电源,然后通过共享直流公共母线给从驱动器(汇)提供直流功率。典型共享直流公共母线组态如图6-7所示。
公共母线主驱动器的额定功率应该大于或等于每个从驱动器的额定功率。
5.共享交流/直流母线混合组态
在多轴系统的例子中,也可采用较为复杂的混合组态,图6-8所示的例子是两个共享交流母线的主驱动器和四个共享直流母线的从驱动器的混合组态。三相交流输入电源提供给两个整流器驱动器,整流器驱动器额定功率必须是相同的,并且要大于等于逆变器驱动器的额定功率。这个并联的整流器组态增加了直流电源提供给逆变器驱动器的功率。
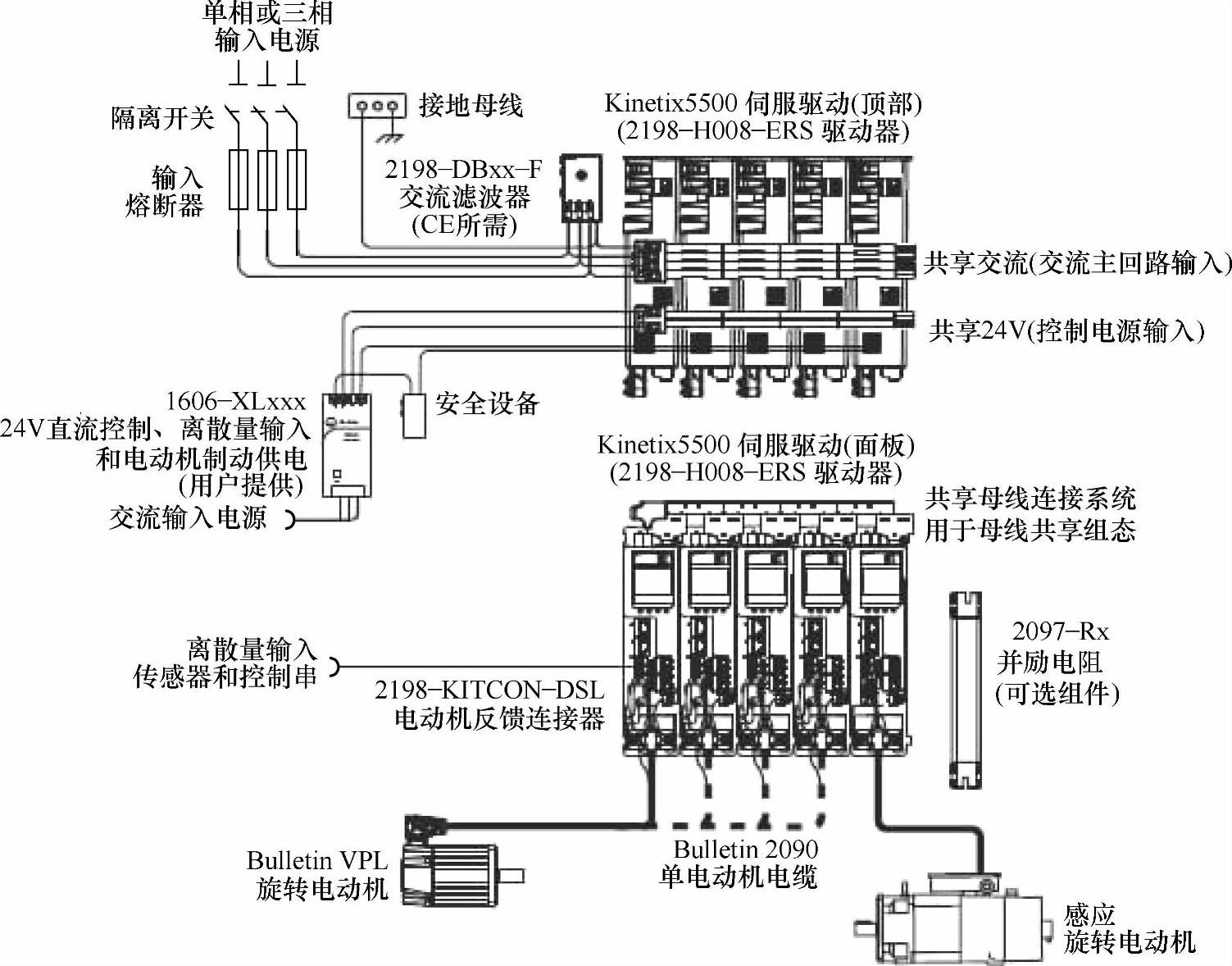
图6-5 典型共享交流组态
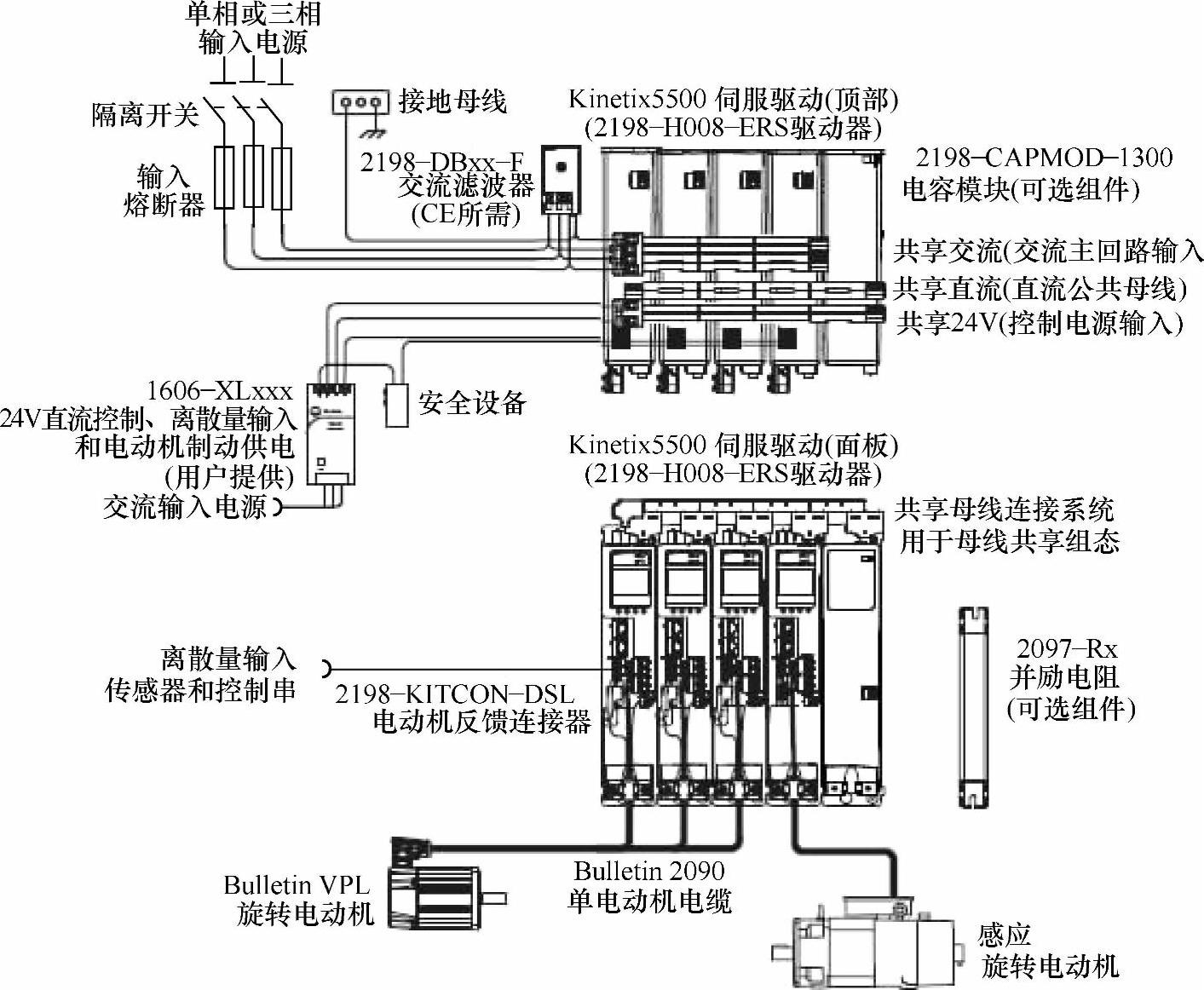
图6-6 典型共享交流/直流组态
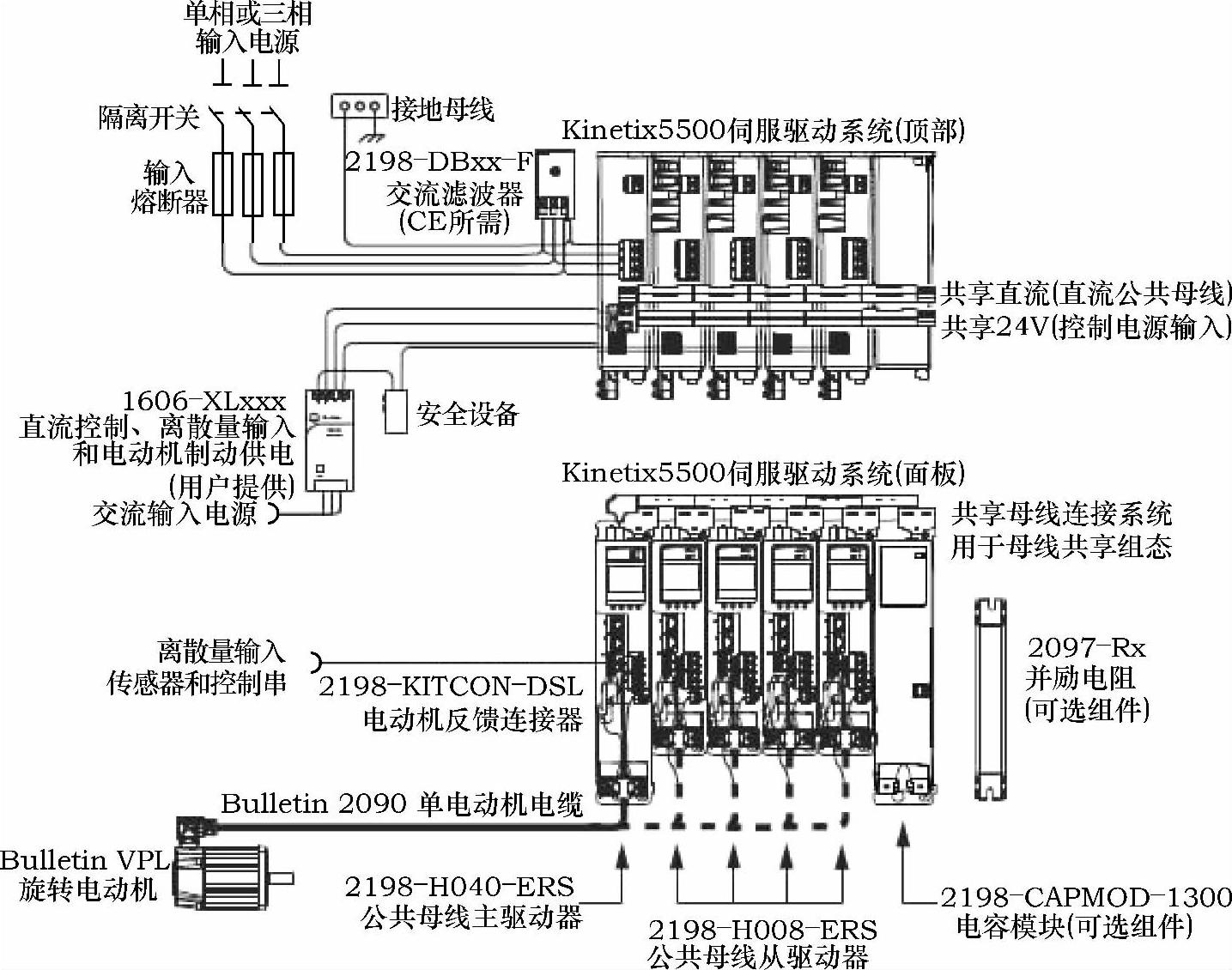
图6-7 典型共享直流公共母线组态
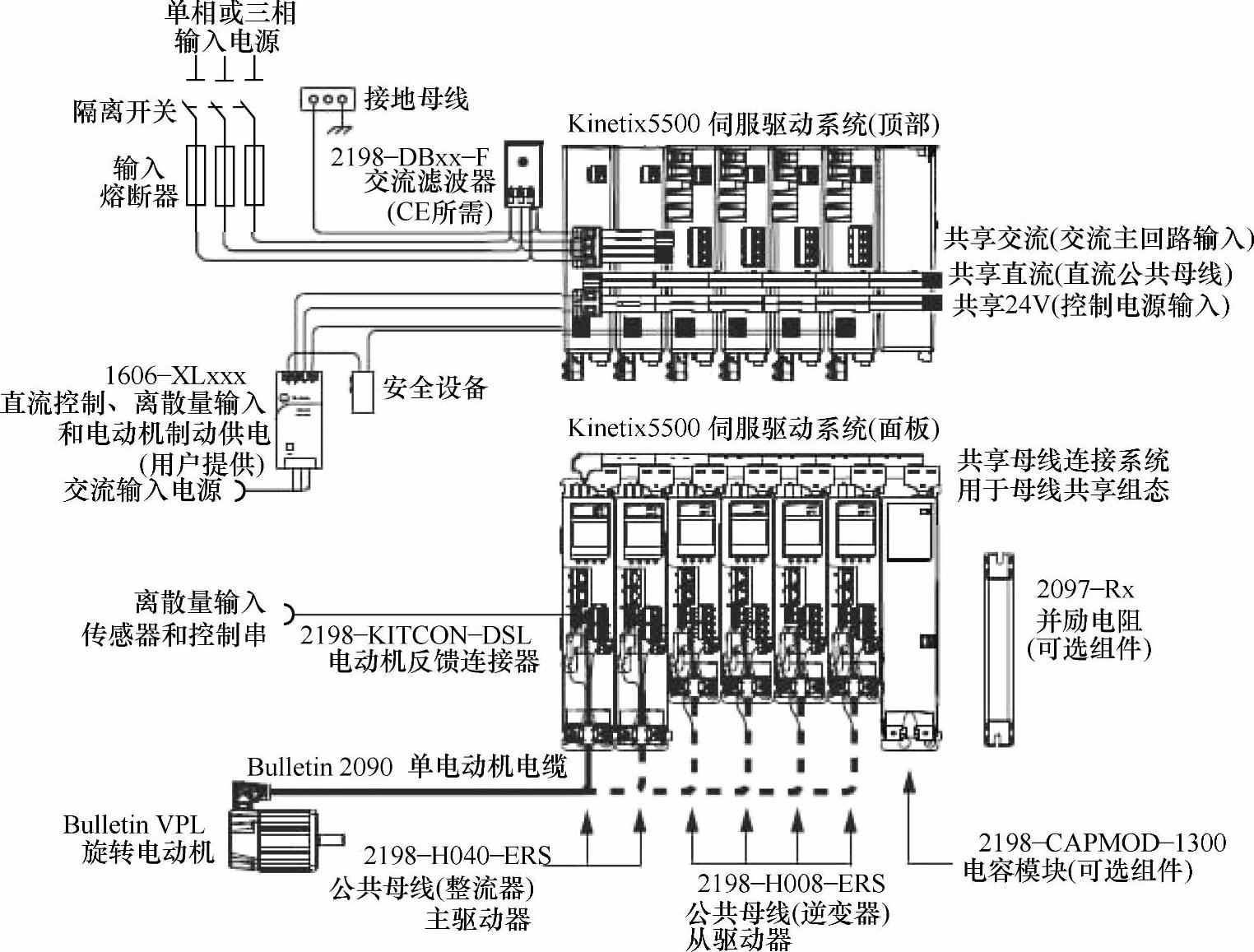
图6-8 典型共享交流/直流母线混合组态
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




