本节以电动机正、反转的实例来阐述PLC的工作原理。如图1-6所示,输入I0.0、I0.1和I0.2分别采集电动机停止、正转和反转的按钮信号,输出Q0.0和Q0.1控制电动机的正转和反转。
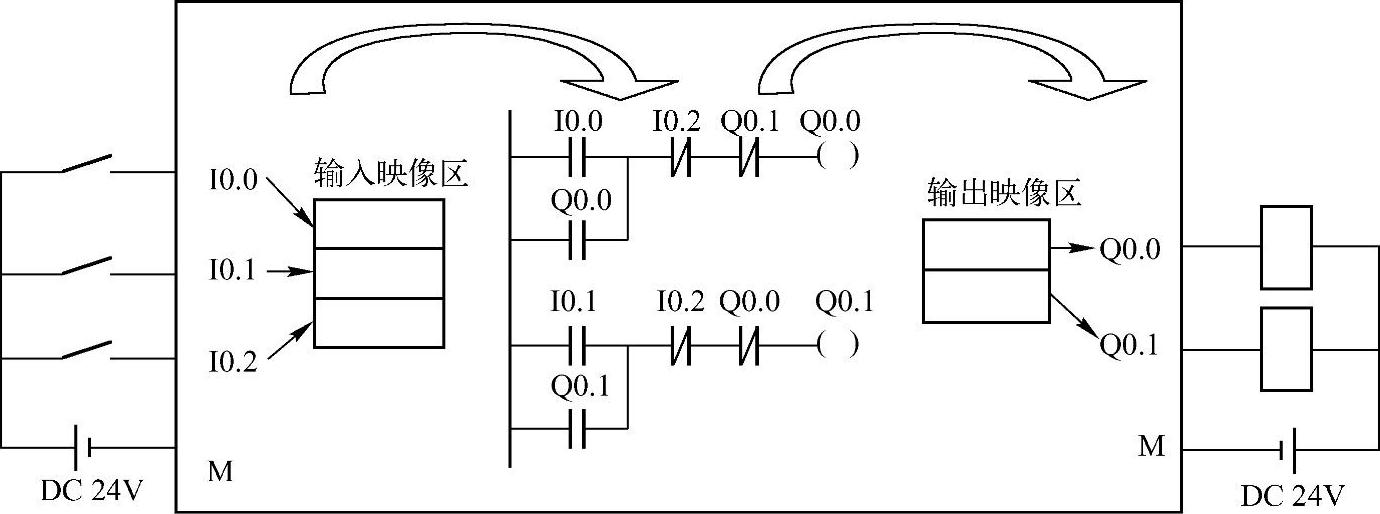
图1-6 PLC的外部接线和梯形图
系统上电或由STOP模式切换到RUN模式时,CPU要执行一次复位操作,包含如下两个操作步骤:
1)清除没有保持功能的位存储器状态、定时器和计数器状态,清除中断堆栈和块堆栈的内容等。
2)执行系统起动组织块OB100。如果用户想使系统在上电后做一些初始化操作,就可以在OB100中编写程序,否则用户完全可以忽略这个组织块。需要注意的是:OB100只在复位后被执行一次。
整个PLC的工作过程是以循环扫描的方式进行的,重复执行一个循环工作周期。以下四个步骤就是PLC程序执行的一个循环工作周期:
1)操作系统起动循环时间监控。
2)CPU将输出映像区中的数据写到输出模块。
3)CPU读取输入电路的接通/断开状态并存入输入映像区。
4)CPU处理用户程序,执行用户程序中的指令,并实时更新内存映像区。(www.daowen.com)
在第1阶段,操作系统起动用户设置的监控循环时间。设置的方法参见第8章。
在第2阶段,CPU将输出映像区中的数据状态传送到输出模块,用于控制与输出点连接的继电器线圈。若上次循环工作周期中输出映像区中Q0.0状态为“0”,而这次Q0.0得电状态为“1”时,控制电动机的继电器线圈通电,其常开触点吸合,电动机正转;反之,控制电动机的继电器线圈断电,其常开触点断开,电动机停止工作。
在第3阶段,PLC通过输入模块采集外部电路的接通断开状态,并写入到输入映像区中。若外部电路开关SB1闭合时,对应的输入映像位I0.0状态为“1”,在梯形图中对应的I0.0常开触点闭合,常闭触点断开,反之亦然。
在第4阶段,在CPU执行程序指令时,从映像区特别是输入映像区中读出程序中所用元件的“0”、“1”状态,并执行指令,将运算结果实时写入到对应的映像区中。需要注意的是:在程序执行阶段,即使外部输入信号的状态发生了变化,输入映像区对应的元件位也不会随之立即改变,只能等到这个循环扫描周期结束,下个循环扫描周期开始时才能被更新。
在S7-300中,系统不断地调用组织块OB1(相当于C语言中的主函数),在主函数中调用其他子程序,包括子程序(指逻辑块FC或FB)和系统自带的子程序(指系统逻辑块SFC或SFB中)。
在实际工程应用中,中断是不可缺少的工作方式,循环工作过程可以被某些事件中断。S7-300和S7-400的CPU为用户提供了多种中断方式,以下几种较为常用:
①中断源通过外部电路的输入进入系统,中断服务程序需事先存入组织块OB40。
②系统提供了某些组织块为中断工作方式服务,有OB10(日期时间中断组织块)和OB20(延时中断组织块)两种。
总之,CPU从第一条指令开始,逐条地执行用户程序,并且循环重复执行。执行指令时,从元件映像区中将有关编程元件的0/1状态读出来,并根据指令的要求执行相应的逻辑运算,实时更新映像区,最后的运算结果输出到生产过程的执行机构中。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





