在运动控制中的大量场合,输入的都是一些高速脉冲信号,如光电编码器信号,这时候PLC可以使用高速计数器功能对这些特定的脉冲量进行加、减计数,来最终获取所需要的工艺数据(转速、角度、位移等)。从硬件角度来讲,PLC都会内置一些端口用于高速脉冲输入,其结构与普通的数字量不同。从软件角度来讲,PLC都会采用特殊的高速计数器指令来进行中断处理。
高速计数器的模式一般分为以下三种:
1.单相脉冲模式
单相脉冲模式是指输入的连续脉冲数来自于一个通道,通常用于接近开关等简易式输入信号,单相脉冲模式控制原理如图4-56所示。
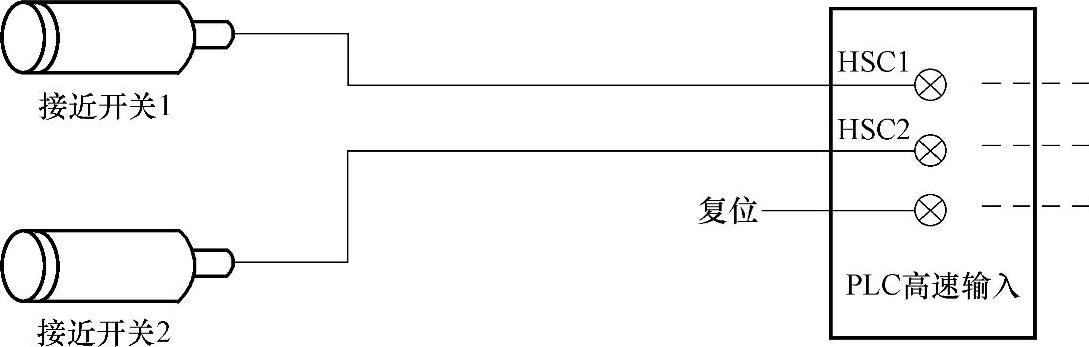
图4-56 单相脉冲模式控制原理
单相脉冲模式又可以分为单相运行模式和单相脉冲+方向模式两种,前者是在输入脉冲的上升沿时当前值加1,如图4-57所示;后者是在B-相在低电平时,当A-相脉冲的上升沿时当前值加1。当A相在高电平时,在A-相脉冲的上升沿时当前值加1,如图4-58所示。

图4-57 单相运行模式
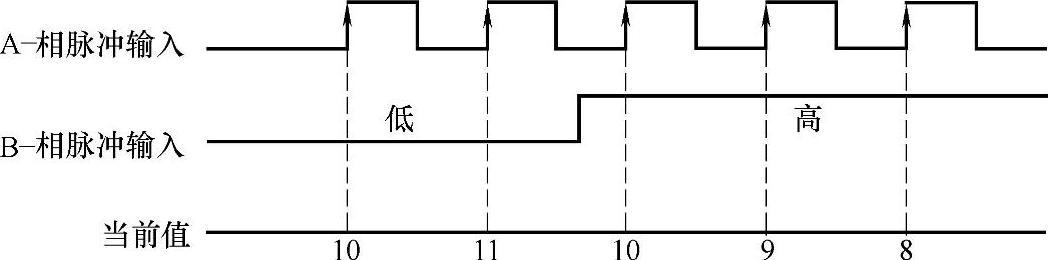
图4-58 单相脉冲+方向模式
2.双相脉冲CW/CCW模式
双相脉冲CW/CCW模式通常与接近开关等简易式输入信号,CW表示正方向(顺时针),CCW表示反方向(逆时针),控制原理如图4-59所示。与单相脉冲控制原理的不同在于,在本模式中,两个接近开关都是为一个高速输入脉冲HSC1服务。
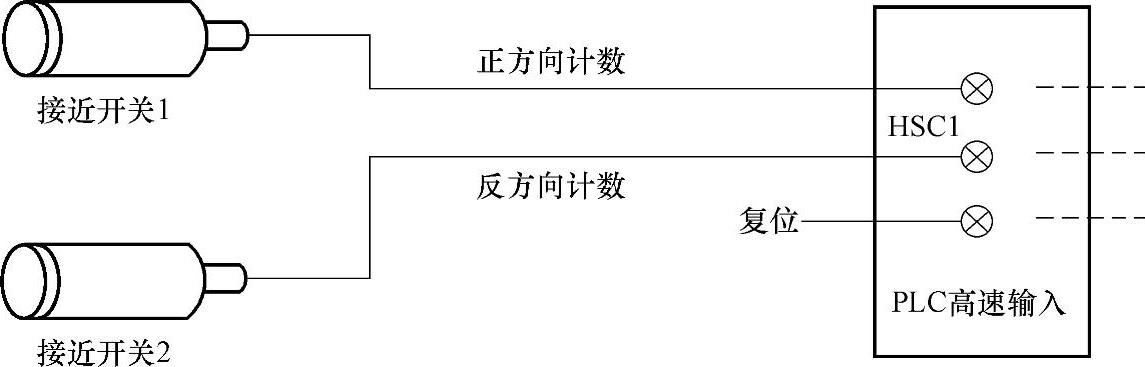
图4-59 双相脉冲CW/CCW模式控制原理
双相脉冲CW/CCW模式的计数器变化是:当B-相在低电平时,在A-相输入脉冲的上升沿时当前值加1。当A-相在低电平时,在B-相输入脉冲的上升沿时当前值加1,如图4-60所示。
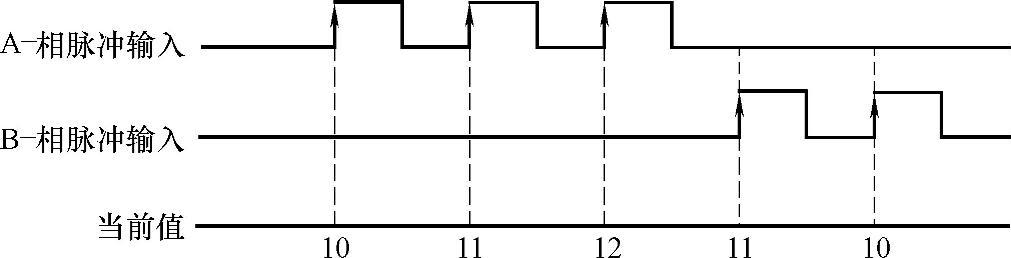
图4-60 双相CW/CCW模式
3.双相脉冲正交模式
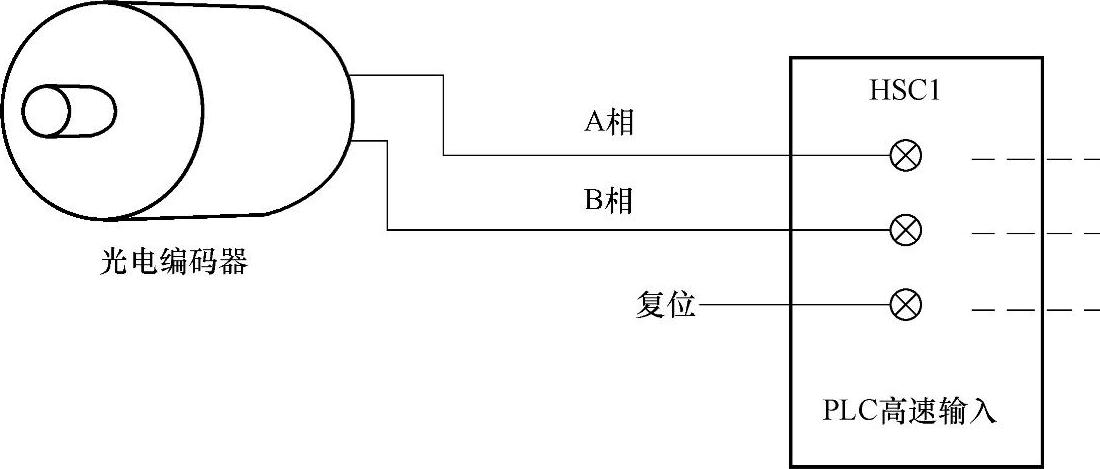
双相脉冲正交模式是为了配合光电编码器而设置的一种特殊控制模式,控制原理如图4-61所示。
 (www.daowen.com)
(www.daowen.com)
图4-61 双相脉冲正交模式控制原理
光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器。光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子器件组成的检测装置检测输出若干脉冲信号,其原理示意如图4-62所示;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。此外,为判断旋转方向,码盘还可提供相位相差90°的双相脉冲正交信号。
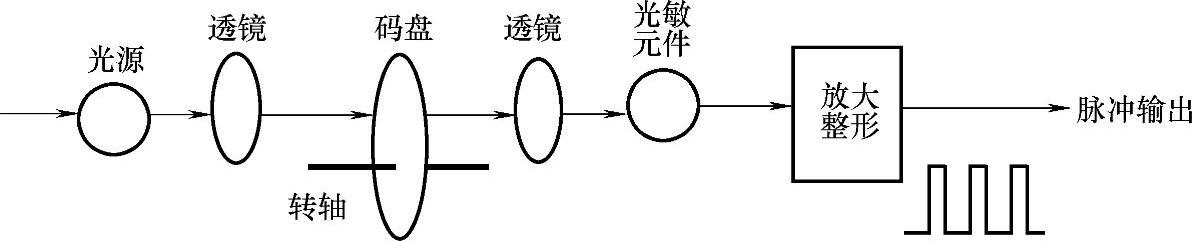
图4-62 光电编码器原理示意
增量式光电编码器输出两路相位相差90°的脉冲信号A和B,当电动机正转时,脉冲信号A的相位超前脉冲信号B的相位90°,此时逻辑电路处理后可形成高电平的方向信号。当电动机反转时,脉冲信号A的相位滞后脉冲信号B的相位90°,此时逻辑电路处理后的方向信号为低电平。因此根据超前与滞后的关系可以确定电动机的转向,其转向判别的原理如图4-63所示。
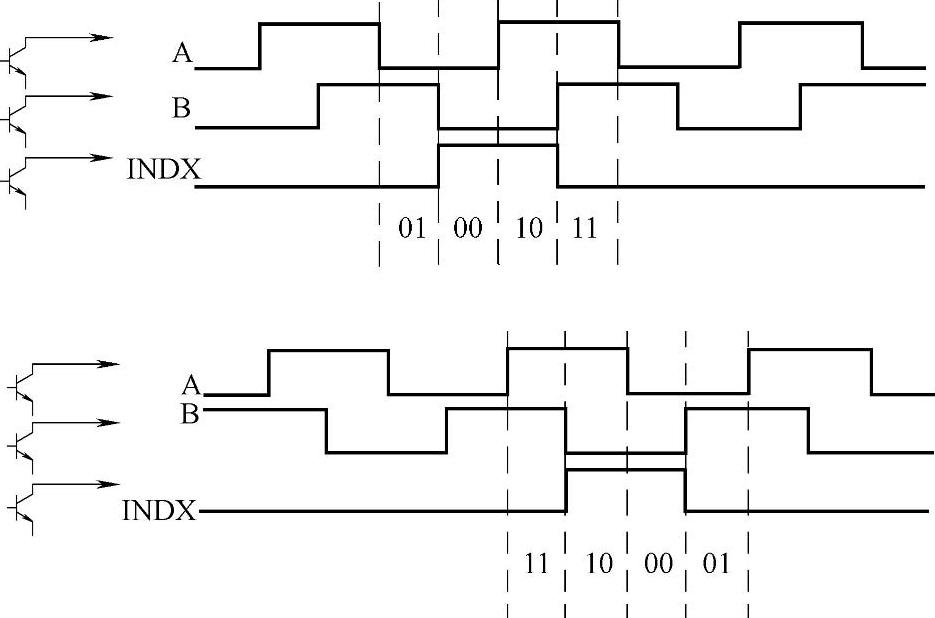
图4-63 电动机转向判别原理图
双相脉冲正交模式具有两种计数方式,即乘1和乘4模式,以乘4模式为例,它的Up或Down计数是通过A和B相的不同自动设定,如图4-64所示。
•Up计数器
-当B相低电平时,在A相脉冲输入的上升沿动作。
-当B相高电平时,在A相脉冲输入的下降沿动作。
-当A相高电平时,在B相脉冲输入的上升沿动作。
-当A相低电平时,在B相脉冲输入的下降沿动作。
•Down计数器
-当B相高电平时,在A相脉冲输入的上升沿动作。
-当B相低电平时,在A相脉冲输入的下降沿动作。
-当A相低电平时,在B相脉冲输入的上升沿动作。
-当A相高电平时,在B相脉冲输入的下降沿动作。
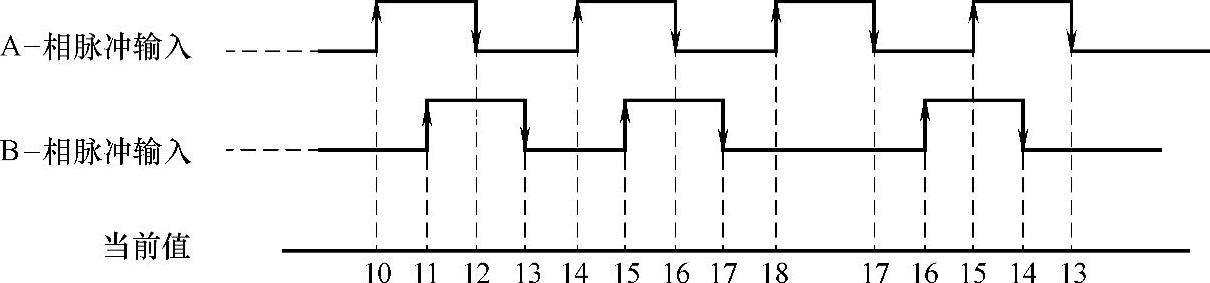
图4-64 双相脉冲正交模式(乘4)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







