某化工厂的恒液位PID控制要求如下:
1)过程反馈值(即实际值)的输入地址为AIW0;
2)PID模拟量输出值地址为AQW0;
3)可以通过I0.0输入开关信号进行手动(I0.0=OFF)/自动(I0.0=ON)切换;
4)高限报警输出为Q0.0,低限报警输出为Q0.1。
1.进入向导,并指定回路号码
如图4-26所示进入PID向导。
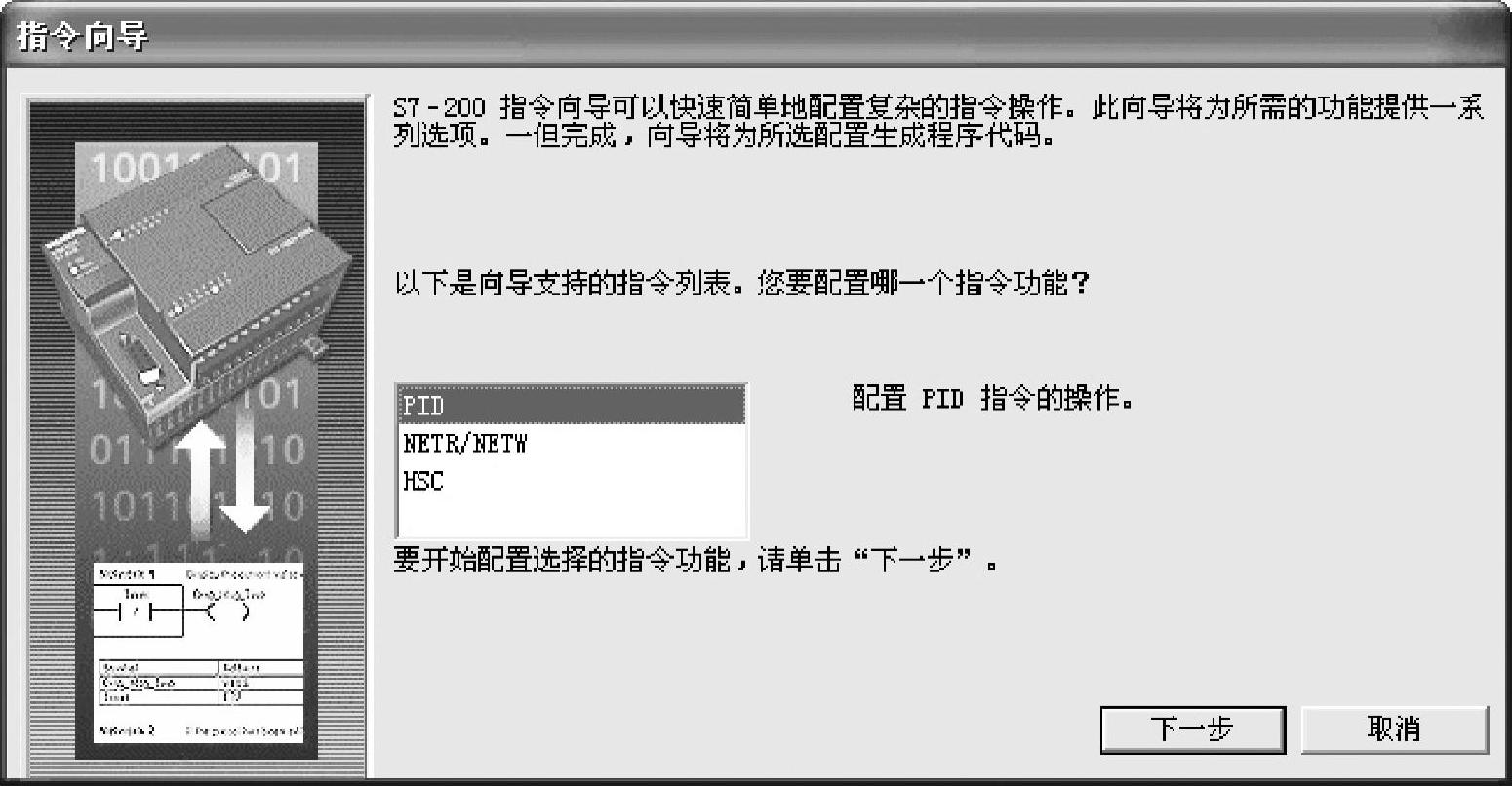
图4-26 进入PID向导
如果项目包含使用STEP 7 Micro/WIN 3.2版建立的现有PID配置,用户必须在继续执行步骤1之前选择编辑其中一个现有配置或建立一个新配置。
然后,用户指定配置哪一个PID回路(见图4-27)。一般情况下,如果只是一个PID,可以采用默认参数,即PID回路0。
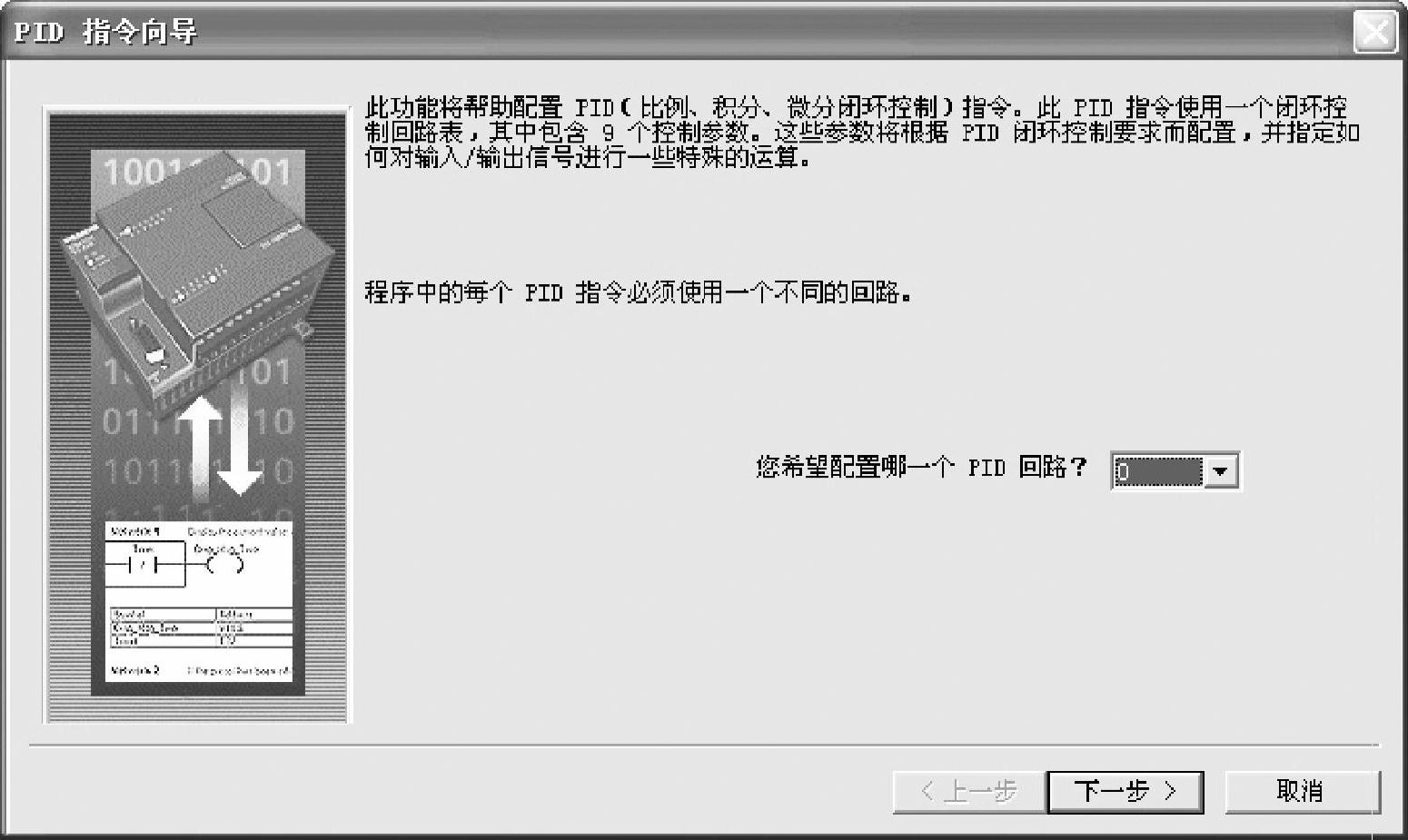
图4-27 指定配置哪一个PID回路
2.设置回路参数
如图4-28所示设置回路参数。参数表地址的符号名已经由向导指定。PID向导生成的代码使用相对于参数表中的地址的偏移量建立操作数。如果用户为参数表地址建立了符号名,然后又改变为该符号指定的地址,由PID向导生成的代码则不再能够正确执行。
回路给定是为向导生成的子程序提供的一个参数,本例选择默认参数。
(1)回路给定值标定 为“范围低限”和“范围高限”选择任何实数。默认值是0.0~100.0之间的一个实数。
(2)回路参数
-比例增益
-采样时间
-积分时间
-微分时间
3.设置回路输入和输出选项
回路过程变量是用户为向导生成的子程序指定的一个参数。向导会询问以下回路输入和输出选项(见图4-29):
(1)指定回路过程变量(PV)应当如何标定
可以选择:
-单极性(可编辑,默认范围0~32000);
-双极性(可编辑,默认范围-32000~32000);
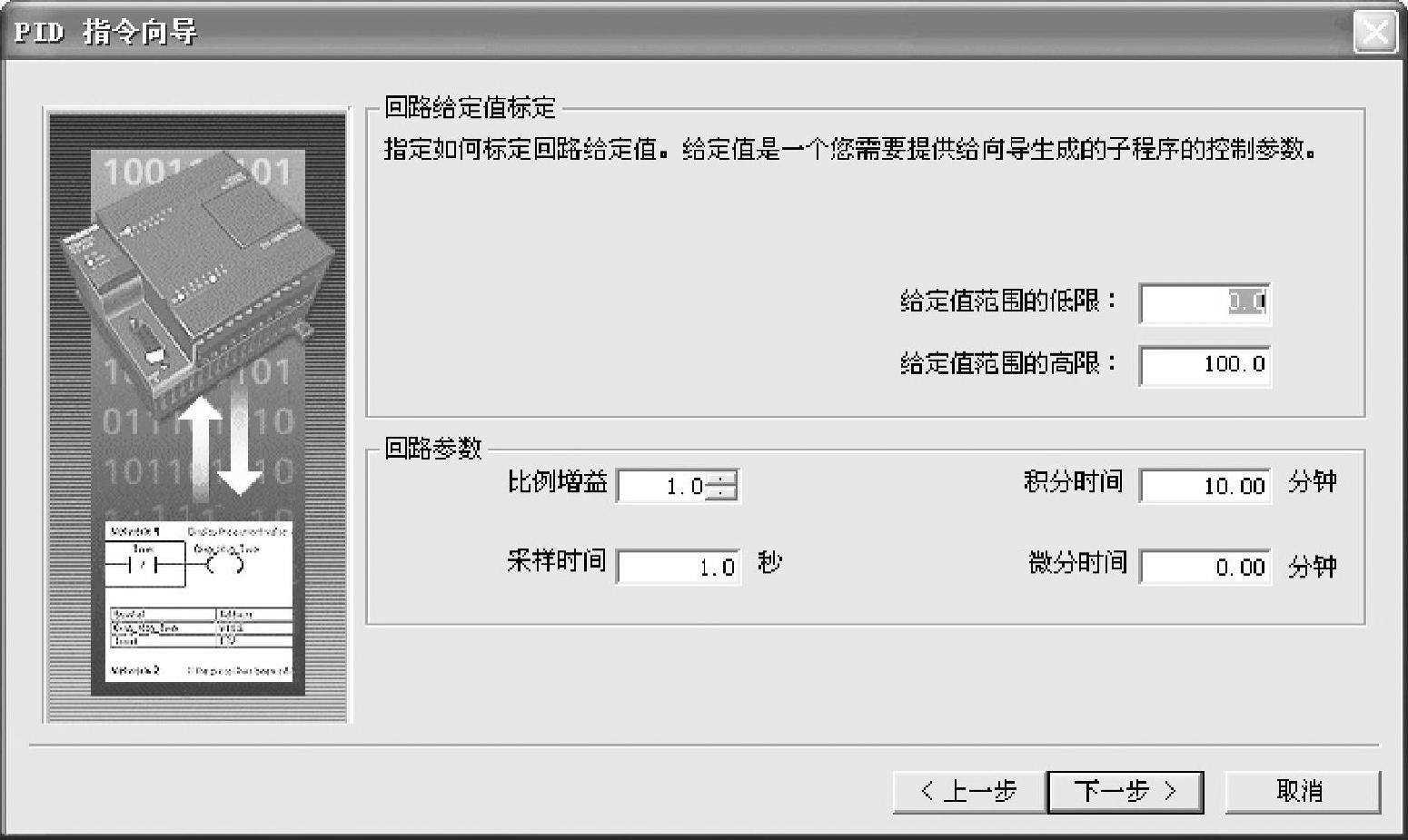
图4-28 设置回路参数
-20%偏移量(设置范围6400~32000,不可变更)。
(2)指定回路输出应当如何标定
可以选择:
-输出类型(模拟量或数字量)。
如果选择配置数字量输出类型,则必须以秒为单位输入“占空比周期”。
-标定(单极、双击或20%偏移量)。
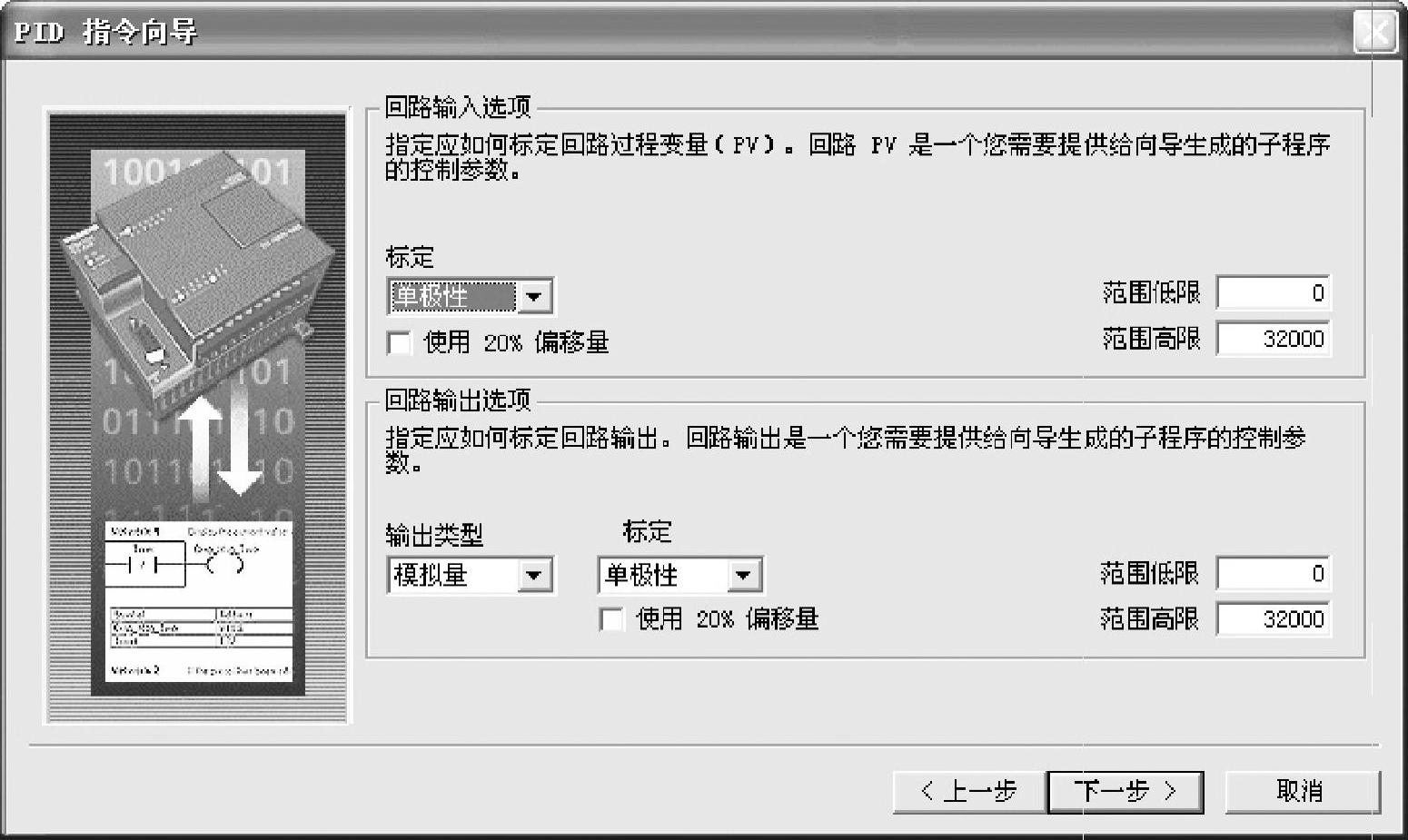
图4-29 回路输入和输出选项
4.设置回路报警选项(https://www.daowen.com)
该向导为各种回路条件提供输出(见图4-30)。当达到报警条件时,输出被置位。
指定希望使用报警输入的那些条件:
-使能低限报警(PV),并在0.0到报警高限之间设置标准化的报警低限;
-使能高限报警(PV),并在报警低限和1.0之间设置标准化的报警高限;
-使能模拟量输入模块错误报警,并指定输入模块附加在PLC上的位置。
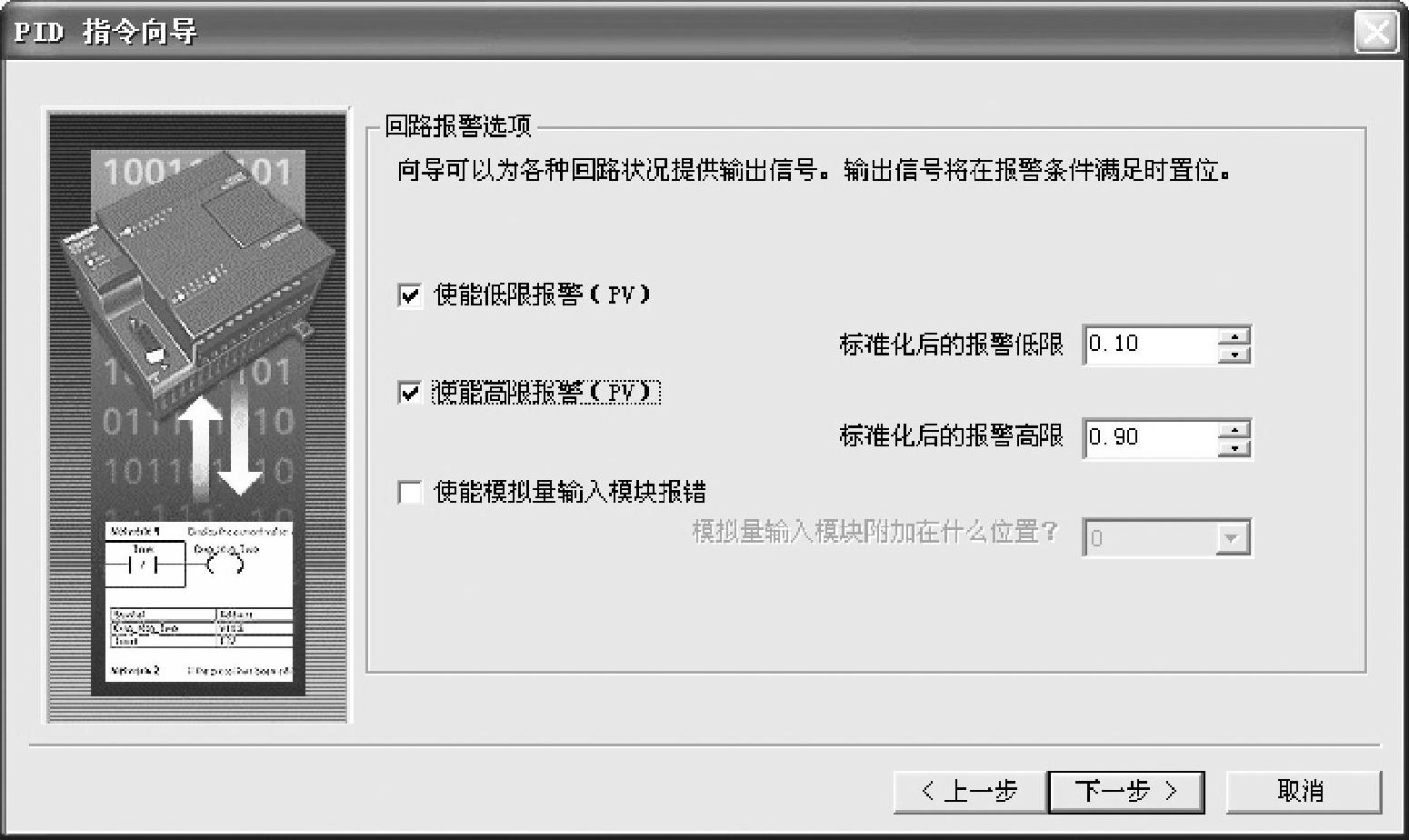
图4-30 设置回路报警选项
5.为计算指定存储区
PID指令使用V存储区中的一个36个字节的参数表,存储用于控制回路操作的参数。PID计算还要求一个“暂存区”,用于存储临时结果。用户需要指定该计算区开始的V存储区字节地址(如图4-31中的从VB0至VB119)。
用户还可以选择增加PID的手动控制(见图4-32)。位于手动模式时,PID计算不执行,回路输出不改变。
当PID位于手动模式时,输出应当通过向“手动输出”参数写入一个标准化数值(0.00~1.00)的方法控制输出,而不是用直接改变输出的方法控制输出。这样会在PID返回自动模式时提供无扰动转换。
6.指定子程序和中断程序
如果项目包含一个激活PID配置,已经建立的中断程序名被设为只读。因为项目中的所有配置共享一个公用中断程序,项目中增加的任何新配置不得改变公用中断程序的名称。
向导为初始化子程序和中断程序指定了默认名称(见图4-33)。当然也可以编辑默认名称。
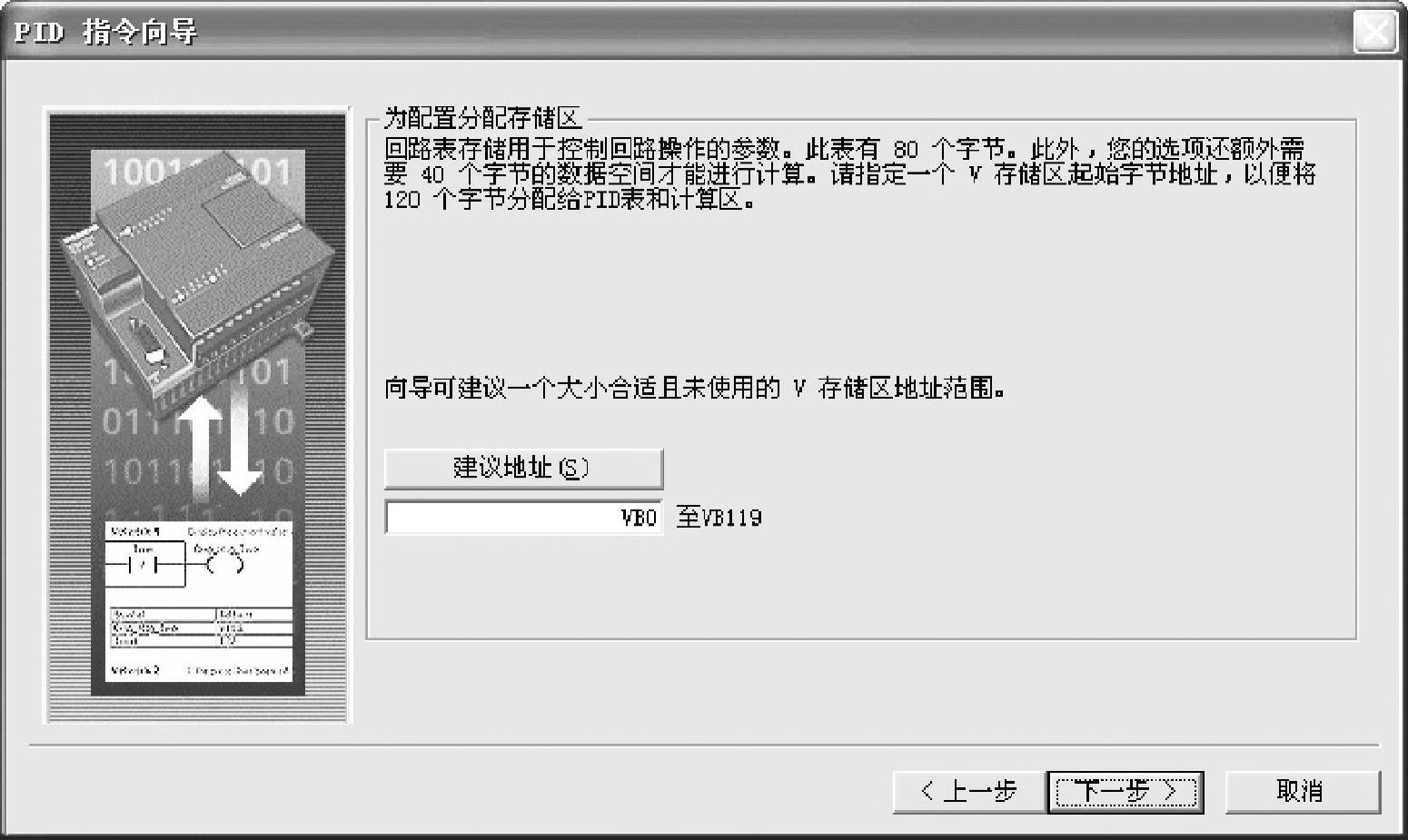
图4-31 为计算指定存储区
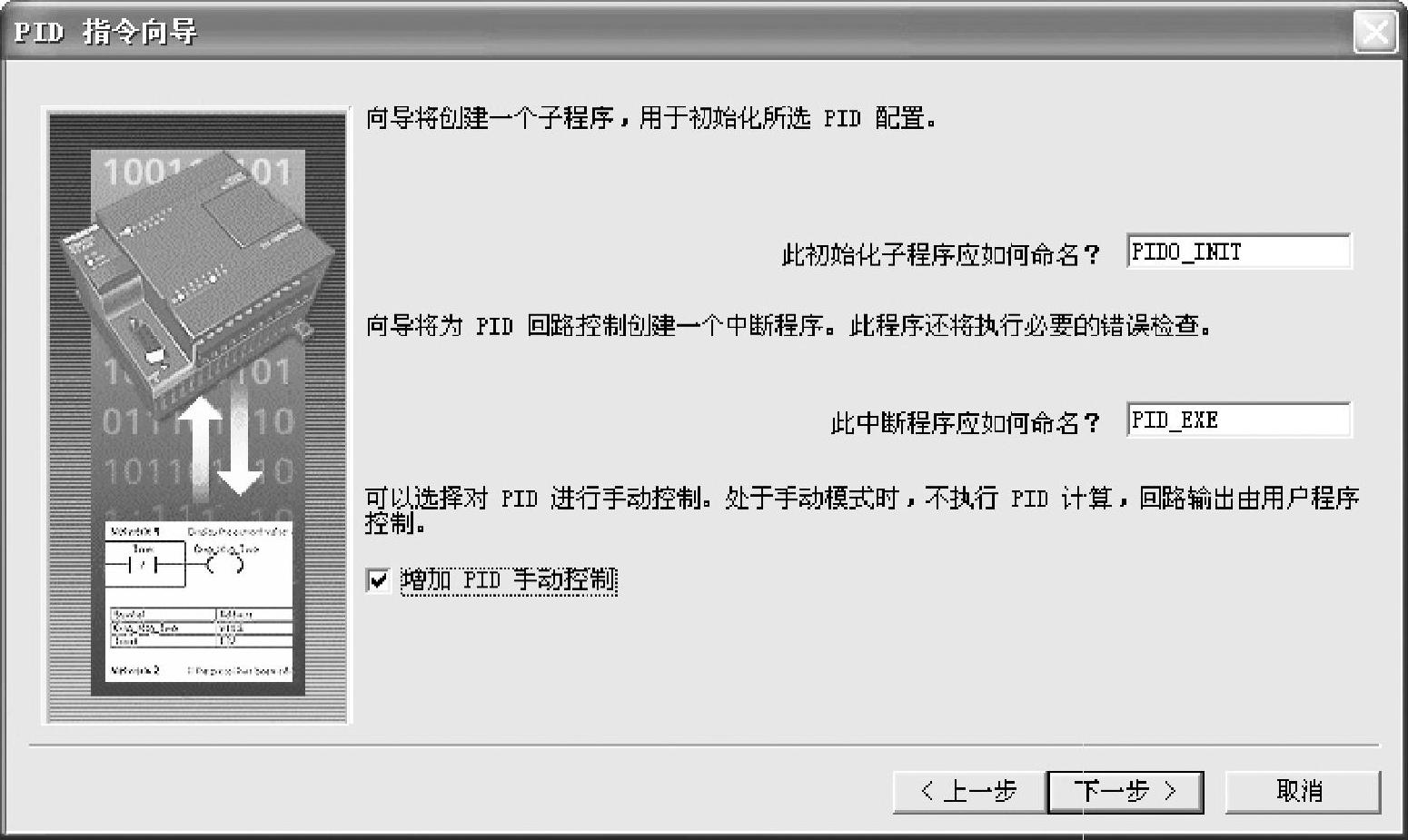
图4-32 增加PID手动控制
7.生成PID代码
回答以上所有询问后,点击“完成”,S7-200PLC指令向导将为用户指定的配置生成程序代码和数据块代码。
由向导建立的子程序和中断程序成为项目的一部分。要在程序中使能该配置,每次扫描周期时,使用SM0.0从主程序块调用该子程序。该代码配置PID 0。该子程序初始化PID控制逻辑使用的变量,并启动PID中断“PID_EXE”程序。根据PID采样时间循环调用PID中断程序。
如图4-34~图4-39所示为PID向导生成的PID符号表、符号表具体内容、所有程序、
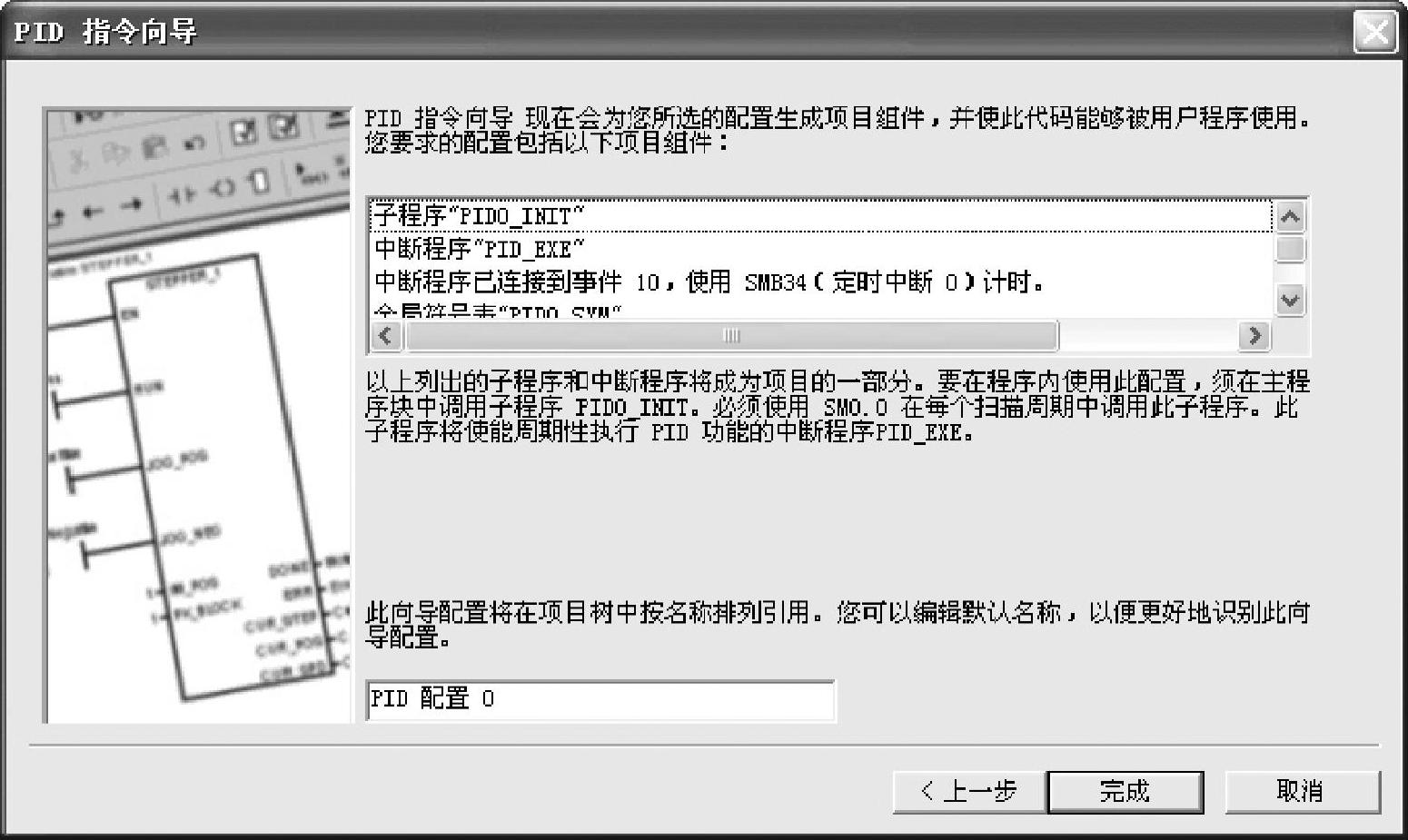
图4-33 指定子程序和中断程序
数据块、PID0_INIT程序的变量定义和主程序。
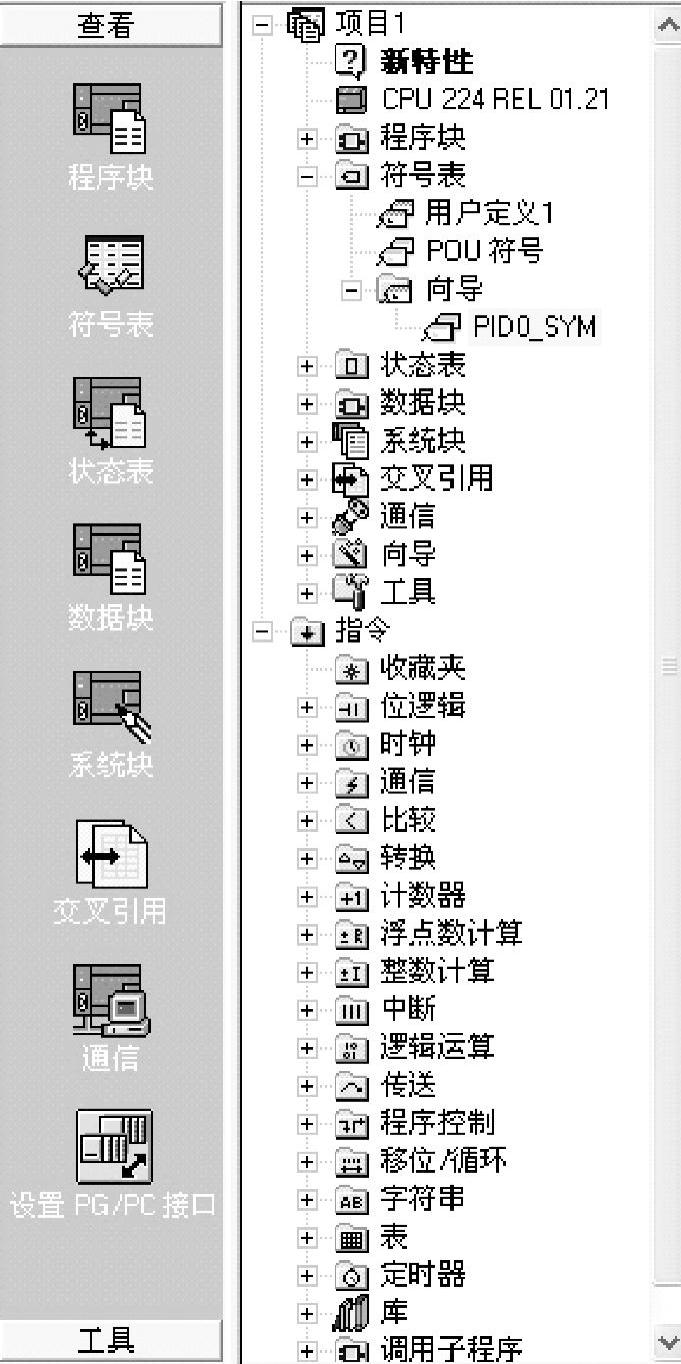
图4-34 生成后的PID符号表

图4-35 符号表具体内容

图4-36 PID向导生成的所有程序
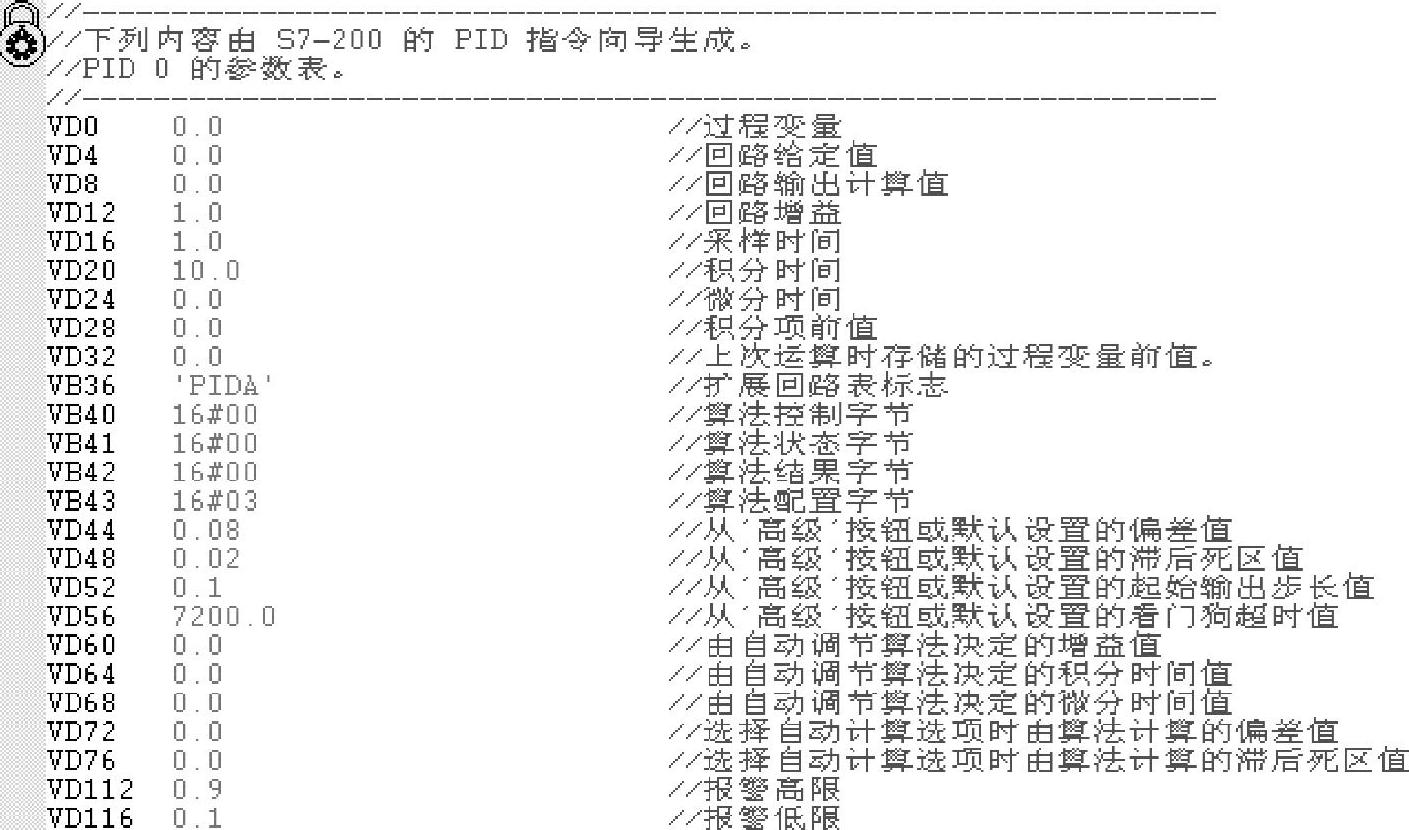
图4-37 数据块
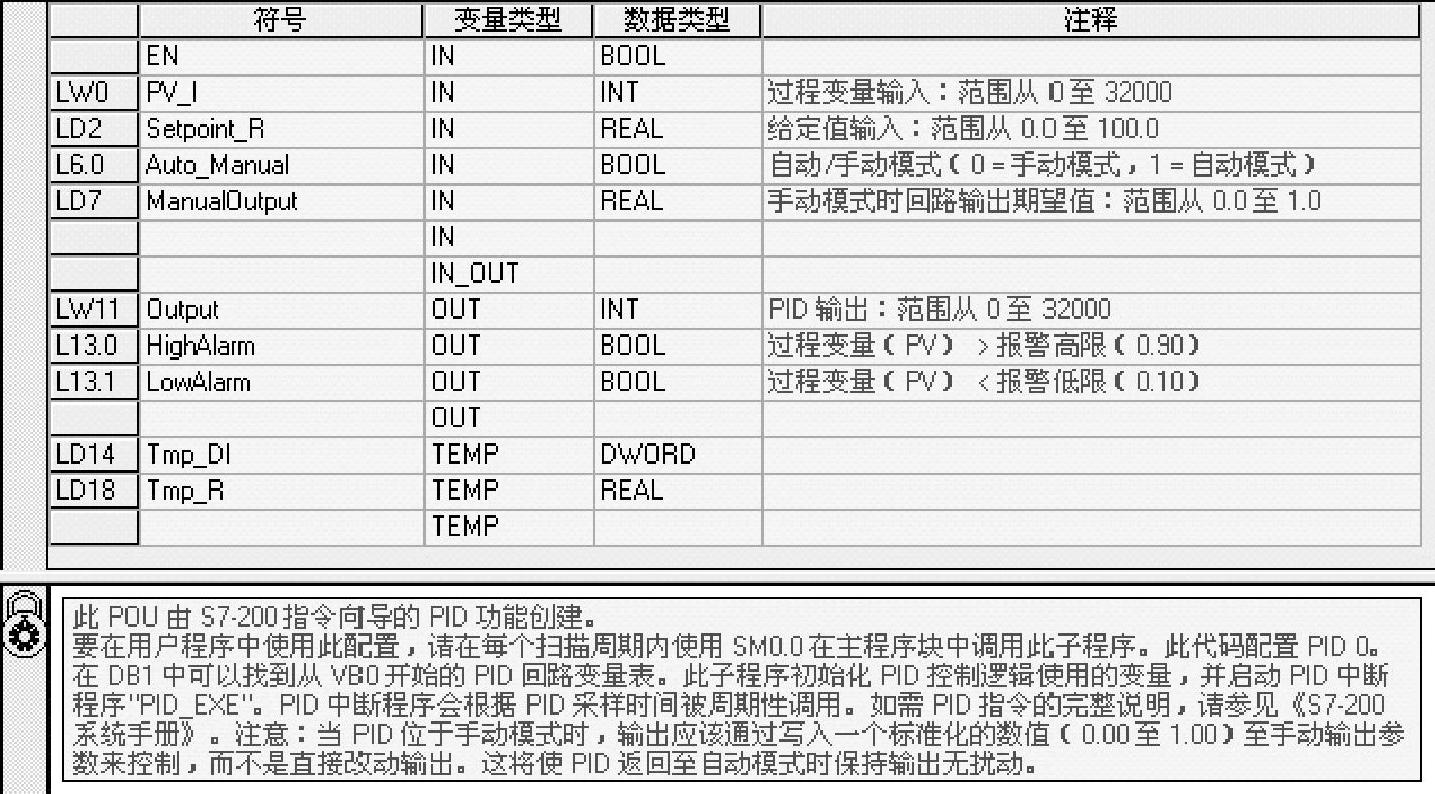
图4-38 PID0_INIT程序的变量定义
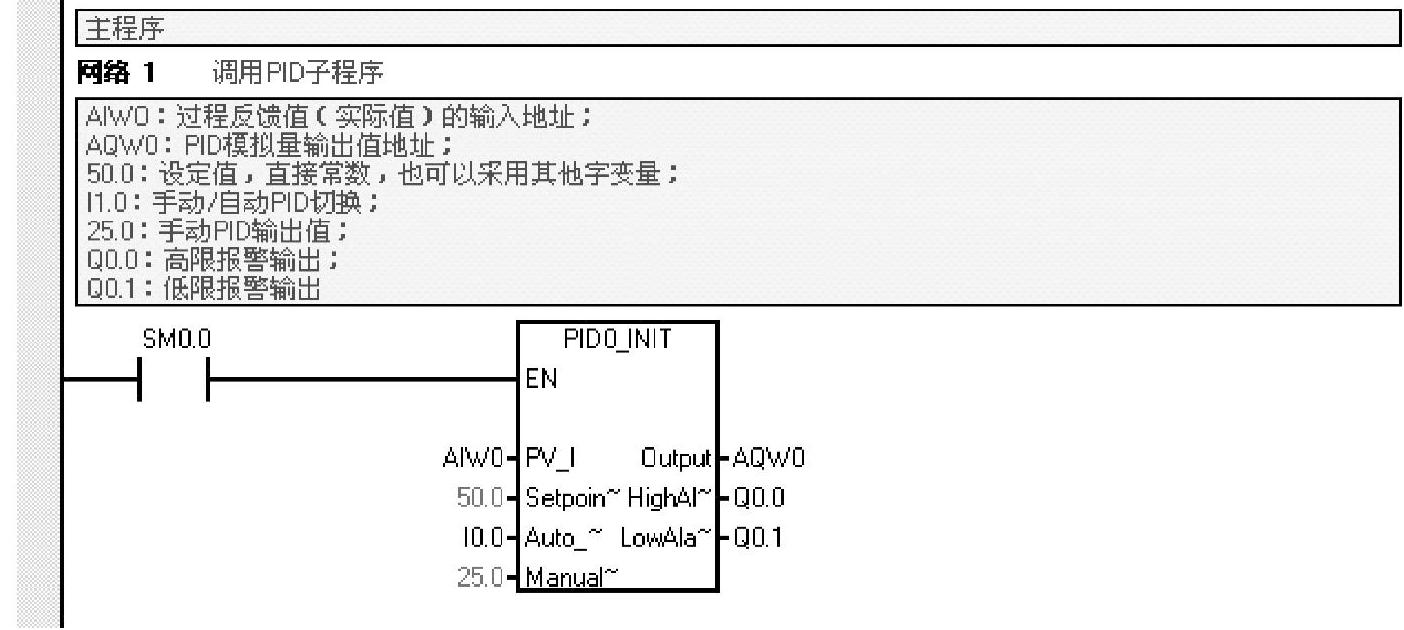
图4-39 主程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






