【摘要】:例如,可能只要求比例控制或比例和积分控制。如果不需要求导数运算,则应将求微分时间(速率)指定为0.0。在实际应用中,设定值、反馈值和输出值均为实际数值,其大小、范围和工程单位可能不同。输出值的转换 该数值在PID操作之后,必须将PID标准化小数转换成实际值,其方法如下:实际输出值=×值域偏置值的选择同。图4-23 单极性数值转换为PID标准信号图4-24 单极性数值输出的例子
在工业控制系统中,可能有必要仅采用一种或两种回路控制方法。例如,可能只要求比例控制或比例和积分控制。这时可以通过设置常数参数值对所需的回路控制类型进行选择。
如果不需要积分运算(即在PID计算中无“I”),则应将积分时间(复原)指定为“INF”(无限大)。由于积分和MX的初始值,即使没有积分运算,积分项的数值也可能不为零。
如果不需要求导数运算(即在PID计算中无“D”),则应将求微分时间(速率)指定为0.0。
如果不需要比例运算(即在PID计算中无“P”),但需要I或ID控制,则应将增益值指定为0.0。
在实际应用中,设定值、反馈值和输出值均为实际数值,其大小、范围和工程单位可能不同。
(1)设定值和反馈值的转换 将这些数值用于PID指令操作之前,必须将其转换成标准化小数表示法,其方法如下:
PID标准值=原值÷值域+偏置值
偏置值如果是单极性数值时取0.0,如果是双极性数值时取0.5。
单极性数值转换为PID标准信号如图4-23所示。(www.daowen.com)
(2)输出值的转换 该数值在PID操作之后,必须将PID标准化小数转换成实际值(0~32000),其方法如下:
实际输出值=(PID标准输出值-偏置值)×值域
偏置值的选择同(1)。单极性数值输出的例子如图4-24所示。
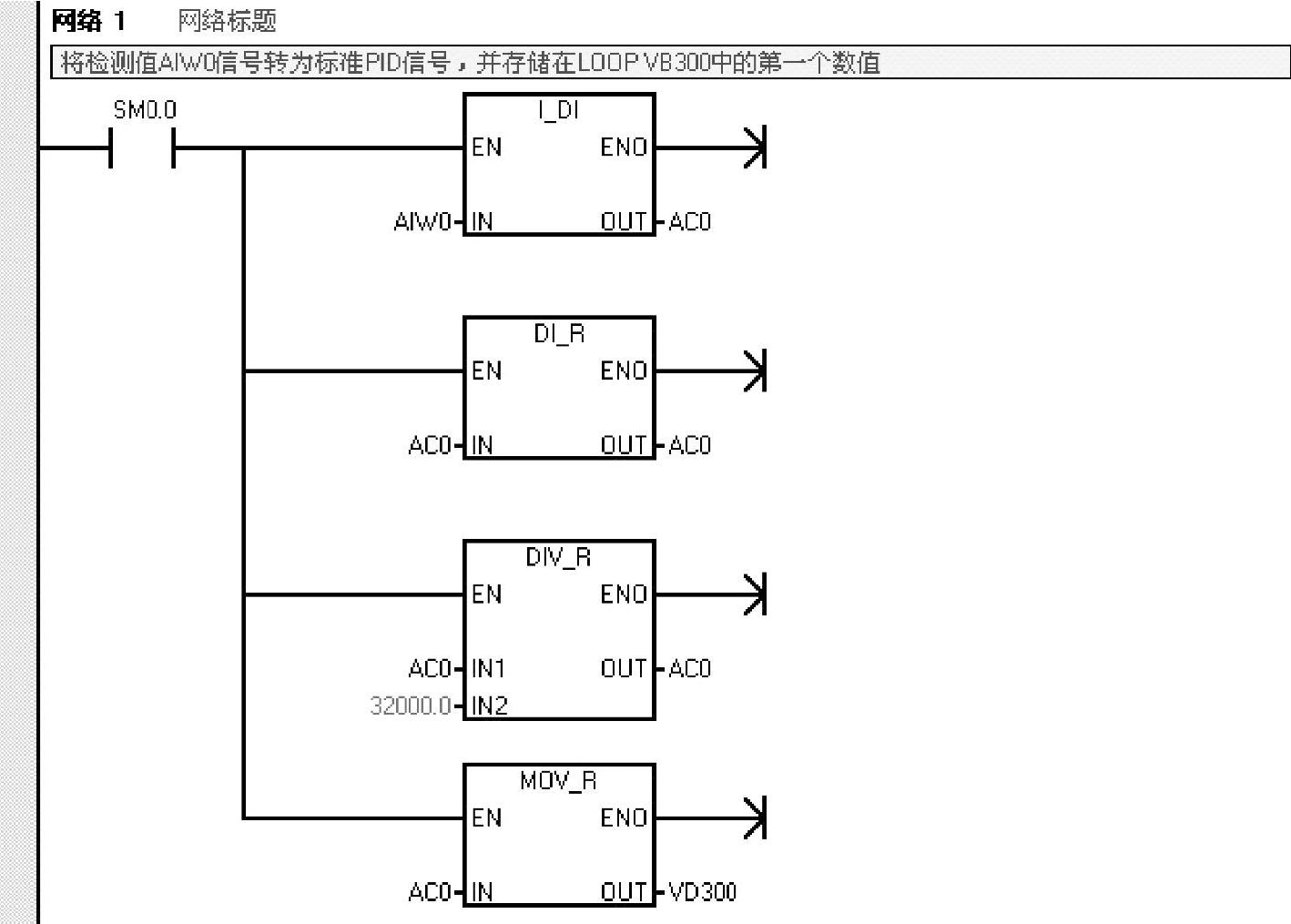
图4-23 单极性数值转换为PID标准信号
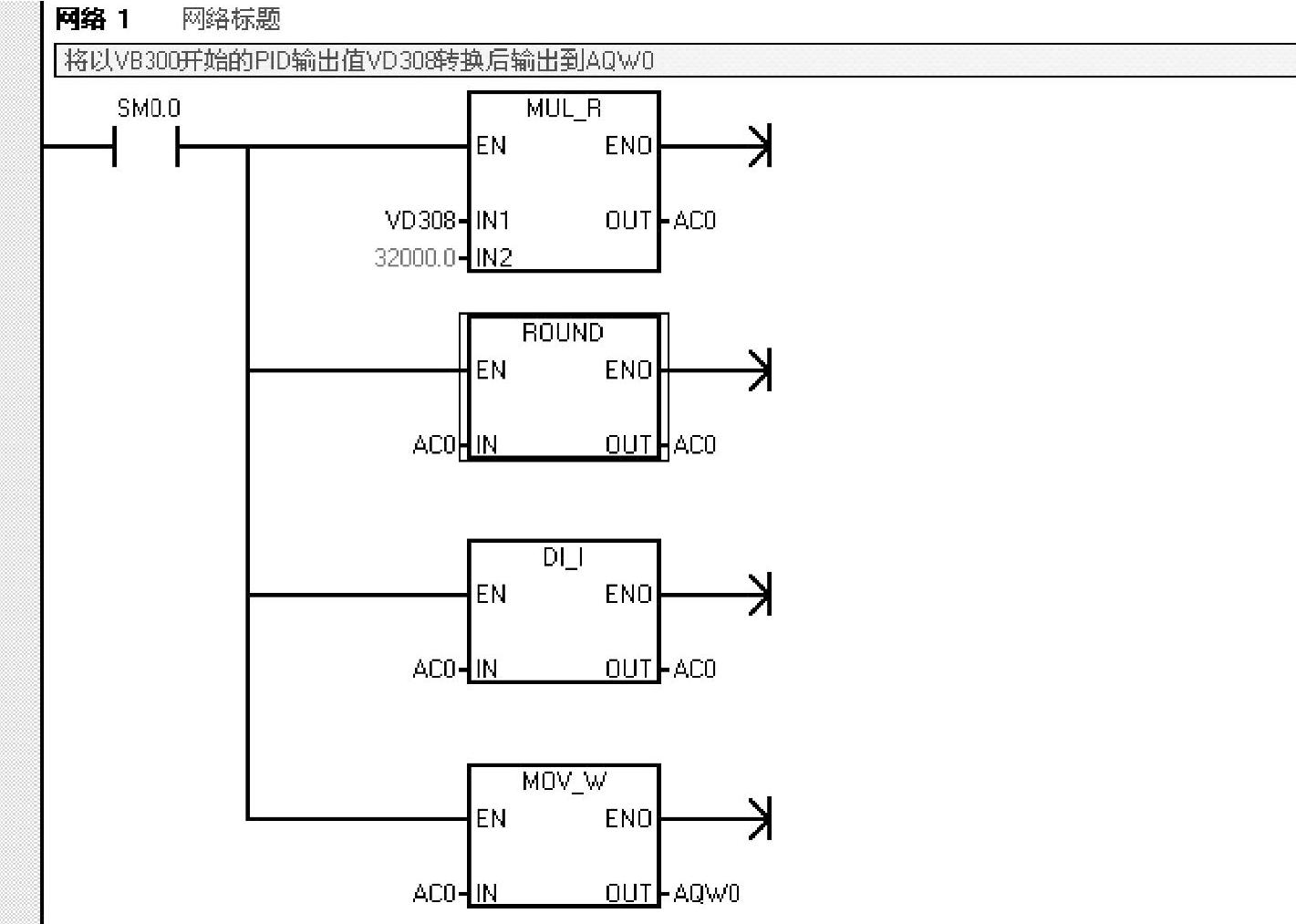
图4-24 单极性数值输出的例子
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关西门子S7 PLC应用简明教程的文章




