卧式加工中心的适应面广,对刀库的容量、刀具规格的要求相对较高,因此,大中型卧式加工中心多采用机械手换刀方式换刀。采用机械手换刀的自动换刀装置需要根据机床的结构进行设计,换刀方式众多、动作各异,但作为基本结构,这种自动换刀装置一般包括刀库回转系统和机械手及其运动系统两部分。
1.刀库回转机构
大中型卧式加工中心的刀库回转系统一般采用链轮传动,其典型结构如图6.3-12所示。由于刀库回转速度不能过高,因此,驱动电动机一般需要通过蜗轮/蜗杆等大比例减速器减速后,才能带动链轮旋转。
图6.3-12中的链轮传动系统由电动机1通过联轴器2和蜗杆4连接,蜗轮5和链轮7上都安装有同轴齿轮,通过齿轮带动链轮旋转。刀座10安装在导向轨上,它可通过连接板11和链条9带动回转,刀座的尾部带有弹簧夹紧装置(图中未画出),可以夹紧刀柄上的拉钉,防止回转时的刀具脱落。涨紧装置12用于链条涨紧。此外,换刀位的刀座还有插销定位装置和回转计数开关等部件。
2.双爪机械手
卧式加工中心的机械手可分为双爪和单爪两类。图6.3-13所示为一种机械式手爪松/夹双爪机械手的结构原理图,这种机械手一般用于带平移运动的大中型卧式加工中心,其夹紧可靠,可用于大规格刀具的抓取和换刀。机械手的刀具的夹紧和松开动作原理如下。
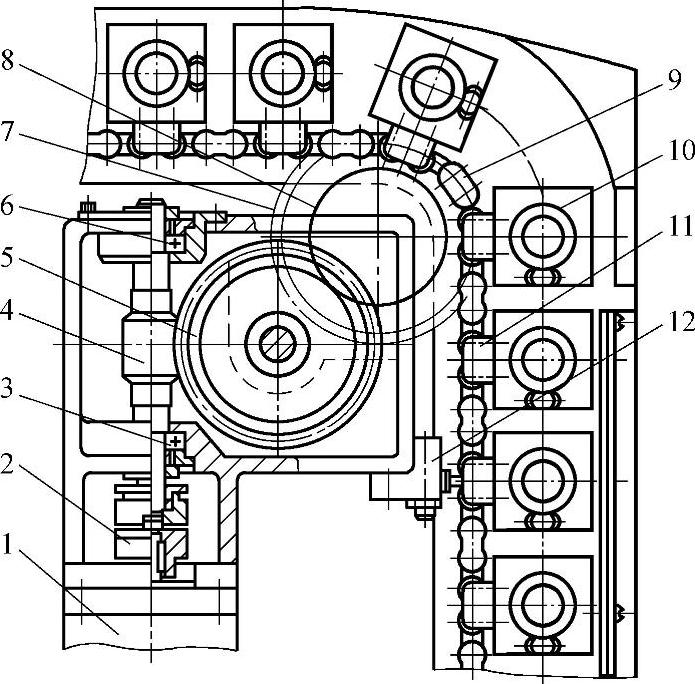
图6.3-12 链轮传动系统
1—电动机 2—联轴器 3—前轴承 4—蜗杆 5—蜗轮 6—后轴承 7—链轮 8—齿轮 9—链条 10—刀座 11—连接板 12—涨紧装置
当机械手向图示的左侧移动时,手爪在插入刀柄的同时,定位块1将插入刀柄的V形切口中,进行刀具定位,防止刀具在手爪内偏转。同时,安装在刀库或主轴侧的滚轮9将推动连杆8、撞块2向右运动,撞块2通过凸轮3带动手爪5回转、夹紧刀具。因此,这种机械手的手爪夹紧力直接来自于平移运动,其夹紧非常可靠。弹簧10有两方面的作用:一是用来调节刀爪的夹住力;二是可起到运动缓冲作用。
刀库(或主轴)上的刀具被夹持住后,如机械手伸出(向上)拔刀,在开始阶段,由于滚轮9始终压住连杆8,刀具仍被手爪夹住;而锁紧块4却通过弹簧7进行向下运动,使锁紧块上的定位面和撞块2啮合,锁住了撞块2的复位运动、刀爪夹紧自锁,保证了机械手从刀库或主轴上取下刀具后,仍被牢牢夹住在手爪上。
在机械手拔出刀具后,便可进行平移、旋转等运动,交换左右两侧的刀具。交换完成后,可通过机械手的缩回(向下)运动,将刀具插入到刀库的刀座或主轴上,完成装刀动作。机械手缩回时,滚轮9将推动锁紧块4向上运动,使锁紧块的定位面和撞块2脱离,并通过滚轮9和连杆8保持手爪夹紧状态,手爪的夹紧自锁被解除。
装刀刀位后,机械手将向左运动,使得手爪脱离刀柄,此时,由于这时夹紧自锁已解除,但锁紧块的上下运动仍被滚轮禁止,因此,当连杆8脱离滚轮9时,松开弹簧6将张开手爪5并推动凸轮3、撞块2向左运动,撞块2的左移将禁止锁紧块4的向下运动,从而使得机械手离开刀库或主轴后,手爪始终处于松开状态,为下次抓到做好准备。(www.daowen.com)
以上机械手的手爪夹紧和松开动作,全部通过机械联动机构实现,无需气动、液压系统控制,机械手结构简单、松夹动作快捷可靠,手爪的夹紧力大并可调,故可用于大规格刀具的抓取和换刀。
3.单爪机械手
为了提高换刀速度,简化自动换刀动作,中小型卧式加工中心多采用机械手无平移的换刀方式,这种机械手的刀具抓取直接通过手臂回转实现,机械手只有伸缩、回转动作,其换刀动作简单、速度较快。利用回转进行抓刀的机械手只能采用单爪形式,图6.3-14所示为一种采用机械松/夹的单爪机械手结构原理图。
单爪机械手的刀具松/夹原理与双爪类似,当机械手回转时,可通过安装在刀库刀座或主轴上的撞块,推动锁紧块3上的球头,使锁紧块上移,解除定位块1的左右运动。此时,可利用刀柄上的圆弧面,推动定位块1向右运动,弹簧4被压缩,刀柄进入刀爪内。当刀柄完全进入刀爪后,锁紧块3将通过弹簧4复位,定位块1插入到刀柄的V形切口上,进行刀具定位,防止刀具在手爪内偏转和回转时的脱落。
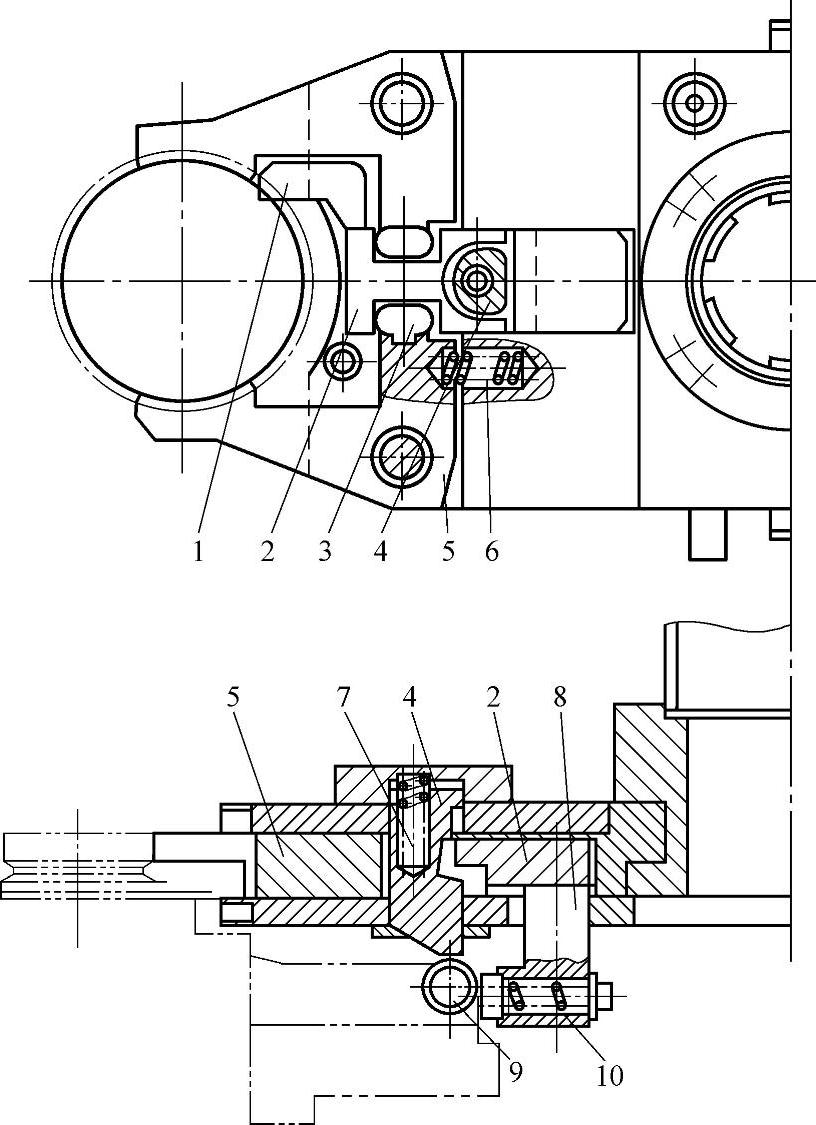
1—定位块 2—撞块 3—凸轮 4—锁紧块 5—手爪 6、7、10—弹簧 8—连杆 9—滚轮
当手臂伸出拔刀时,刀库刀座或主轴上的撞块脱离锁紧块的球头,锁紧块3在弹簧2的推动下下移,其定位面和定位块1啮合,禁止定位块的右移。这样,刀具便可利用键和定位块固定在手爪上。
以上单臂机械手的刀爪抓取刀具后,实际没有夹紧动作,因此,只能用于小规格卧式、立式加工的换刀,在换刀速度快、刀具规格较大的机床上,需要另外增加刀具气动或液压松/夹机构。
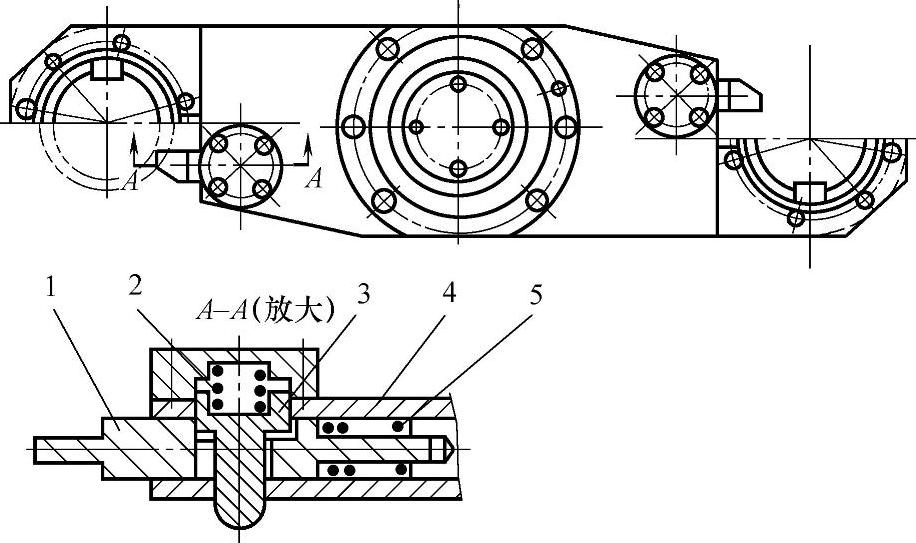
图6.3-14 机械松/夹单爪机械手结构图
1—定位块 2、4—弹簧 3—锁紧块 5—手臂
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






