硬件电路主要由两部分组成:控制平台、功率变换平台(包括AC-DC整流电源部分和DC-AC逆变器,开关电源电路),如图3-1所示。
控制平台中,采用32位浮点运算功能的高性能数字信号处理器,完成高实时性的全数字矢量控制和闭环伺服控制,大规模现场可编程门阵列FPGA实现外部I/O信号管理、通用指令接口处理、故障信号处理、控制参数设定、键盘处理、状态显示、串行通信、通用编码器接口处理等功能。
其中通用指令接口可适配不同类型的指令接口模块,来连接不同类型的指令接口(包括各种现场总线以及基本的模拟量、脉冲量信号等);通用编码器接口可连接绝对值编码器、正余弦编码器、增量式编码器等反馈元件。
功率变换平台包括AC-DC整流电源、软启动及泵升泄放控制电路、DC-AC逆变器、开关电源等功率电路。选配不同功率的功率器件可形成各种功率规格的驱动单元。
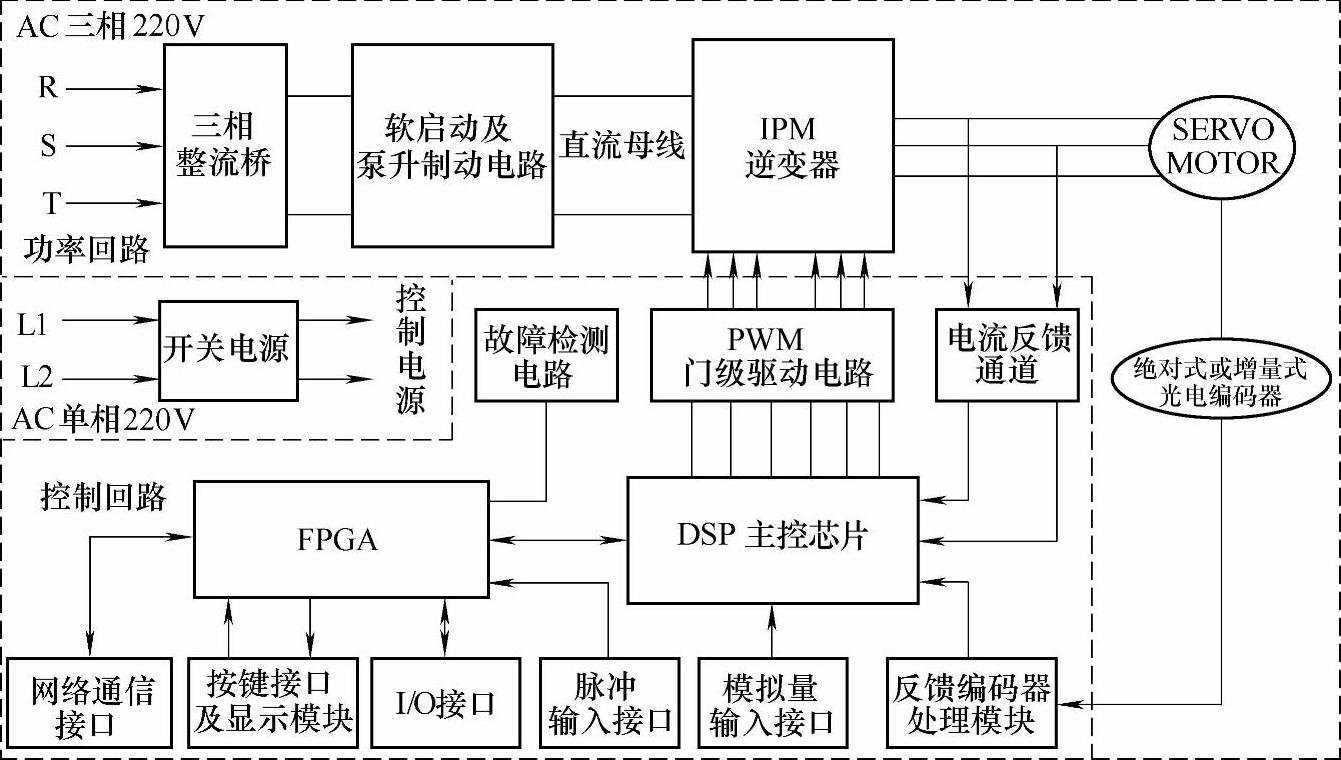
图3-1 HSV-160全数字交流伺服驱动单元硬件体系结构(www.daowen.com)
软件平台技术路线:采用实时操作系统的调度管理体系结构和数据结构形式的模块封装方法,开发驱动装置基础软件平台,并根据系统的控制结构和控制功能要求,开发各控制功能模块;在通用的基础实时控制软件平台上进行全数字控制,实现高速、高精度和高响应伺服控制。
基于统一电机理论的全数字交流伺服驱动单元控制框图如图3-2所示。
其中,利用不同的功能模块组合可以实现不同的伺服控制功能,满足不同的系统应用要求。交流永磁同步伺服电动机控制采用的策略:位置、速度伺服控制;统一的交直轴电流控制,基于极限圓的过调制处理策略,基于电压极限圓的弱磁升速控制策略;交流永磁同步主轴电动机控制采用的策略:位置、速度伺服控制;独立的交直轴电流控制,基于极限圓的过调制处理策略,基于电压极限圓的电压矢量受限弱磁控制策略,电流协调分配控制,基于矢量功率角校正的效率最大化控制;交流感应式异步主轴电动机控制采用的策略:位置、速度伺服控制;统一的交直轴电流控制,基于极限圓的过调制处理策略,基于电压控制的弱磁电流设定控制,电流协调分配控制,转差矢量功率角校正。
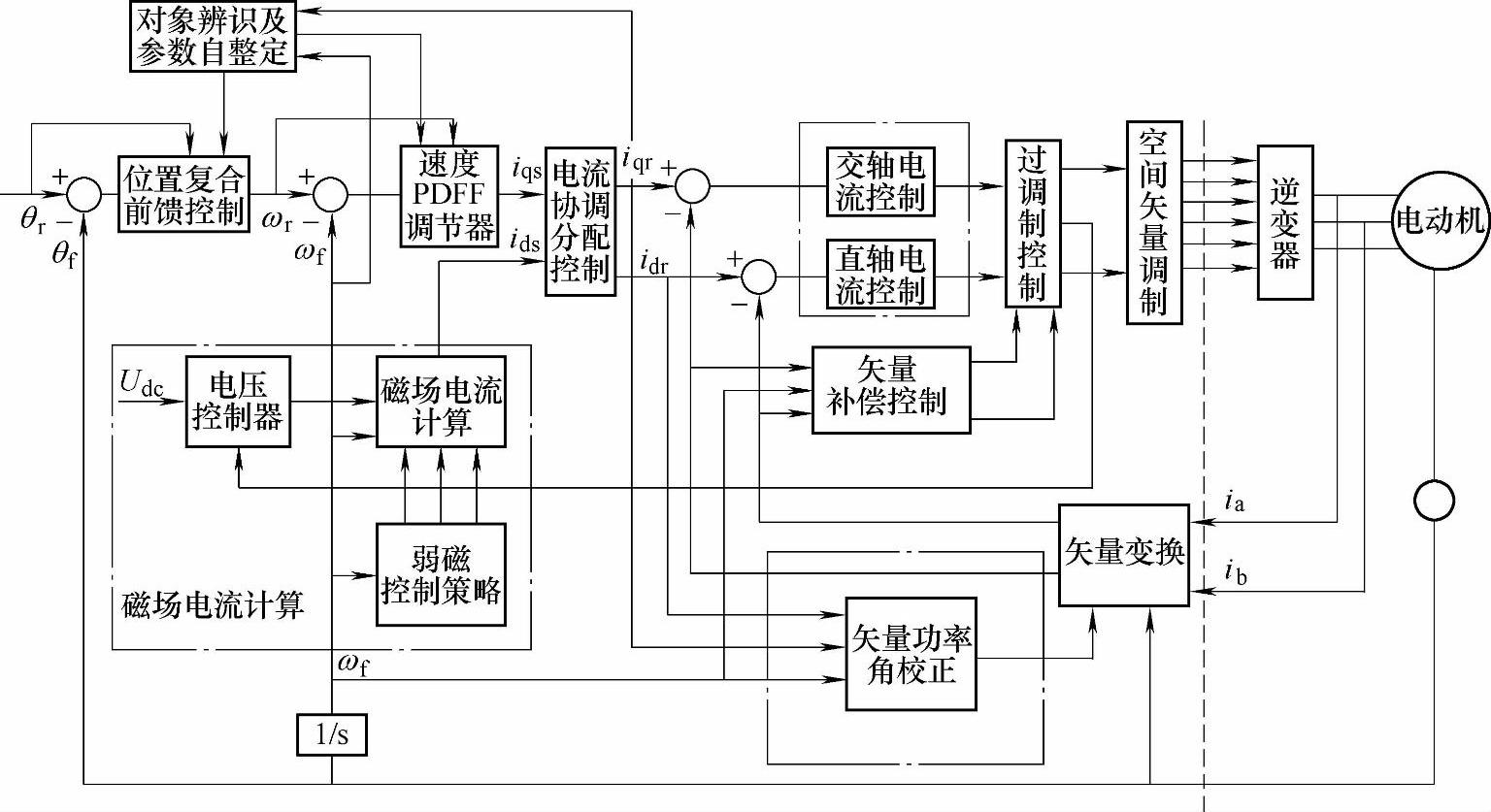
图3-2 全数字交流伺服驱动单元控制框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






