本节将以日本早稻田大学仿人机器人研究所研发的机器人WABIAN-RII为例,描述基于情感的双足机器人运动系统。在本节中,考虑3种基本情感,即平静、快乐和难过。这些情绪通过双足机器人行走风格表示,行走风格通过全身运动化参数预先设定。为了在情绪表达期间保持机器人平衡,采用躯干运动辅助平衡,其通过基于头部,手臂和腿部运动的补偿运动控制来计算。
双足类人形机器人具有43个机械自由度和4个被动自由度(平移运动和3个旋转运动)。WABIAN-RII如图6-7所示,其高度约为1.84m,总重量为127kg。
1.运动参数和行走模式
(1)平静状态下的行走模式 在平静状态下,双足机器人采用平滑模式行走。腰、头部、脚可以由多项式决定。平滑行走需要考虑角度、角速度、角加速度和脚最高位置的角度,通过使用6阶多项式生成地面参数。通过选择初始值和最终值产生脚位置和方向的3个约束xfoot(t0)=x0,xfoot(tf)=xf,xfoot(tm)=xm式中,t0为起始时间,tm为中间时间,tf为终止时间。

图6-7 WABIAN-RII机器人
位置和取向xfoot还有4个约束,即零初始速度和加速度、最终速度和加速度

上述7个约束可以构成一个6项多项式
xfoot(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5+a6t6
我们可以清楚地得到沿着路径的速度及加速度

结合上述公式可以得到7个系数(a0,…,a6)的值。然后在6个多项式中我们可以得到行走的路线图。
(2)快乐状态下的行走模式 如下表,在快乐状态下,我们设定8个参数和4个步态特征。
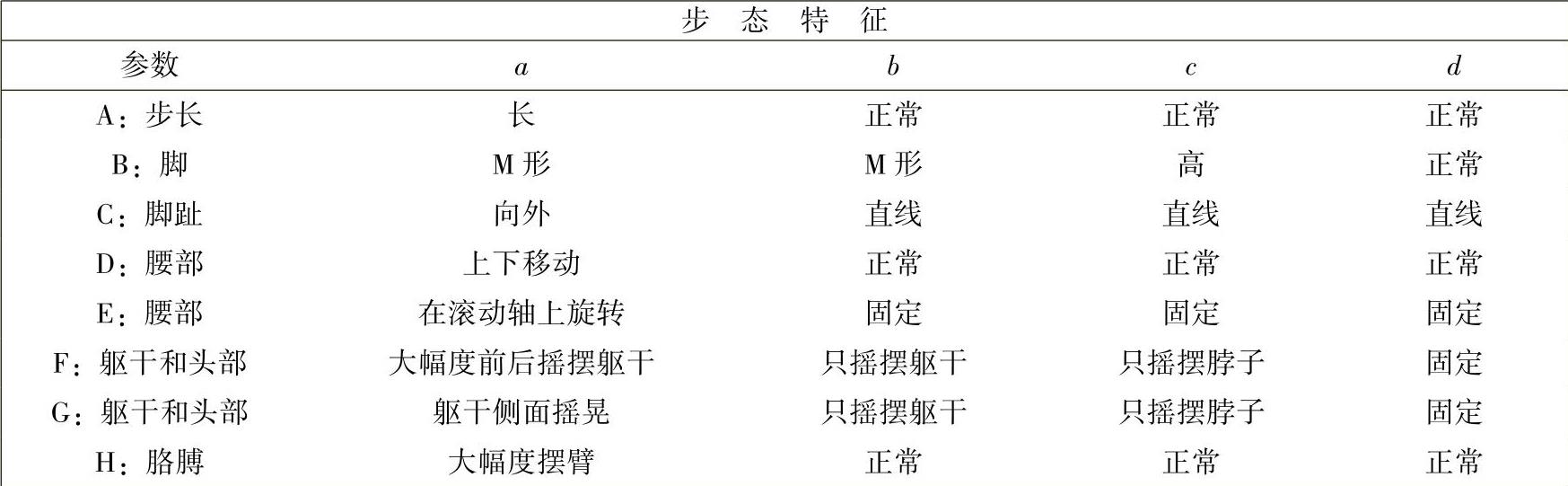
其中双足部分:
A:正常步伐的脚趾的中间X位置为0.075m,最终X位置为0.15m,而步长长的脚趾中间X位置为0.10m,最终X位置为0.20m。
B:正常脚在摆动阶段的第一个和最后一个阶段中,脚趾的加速度为Z方向的0.002m/s2。M形脚踏轨迹在摆动阶段的第一个和最后一个阶段中,利用0.05m/s2到Z方向的加速度确定。在中心脚中,脚趾的Y方向位置是固定的。在步态阶段的中期,侧脚具有-0.20m的趾部Y方向位置和-20°的侧倾定向。高脚在摆动阶段的中期具有0.10m的趾部Z方向位置和0.002m/s2的Z方向加速度。(https://www.daowen.com)
C:向外的脚具有30.0°的脚趾偏航方向。
(3)难过状态下的行走模式 在难过状态下,我们设定11个参数和2个步态特征,如下表。
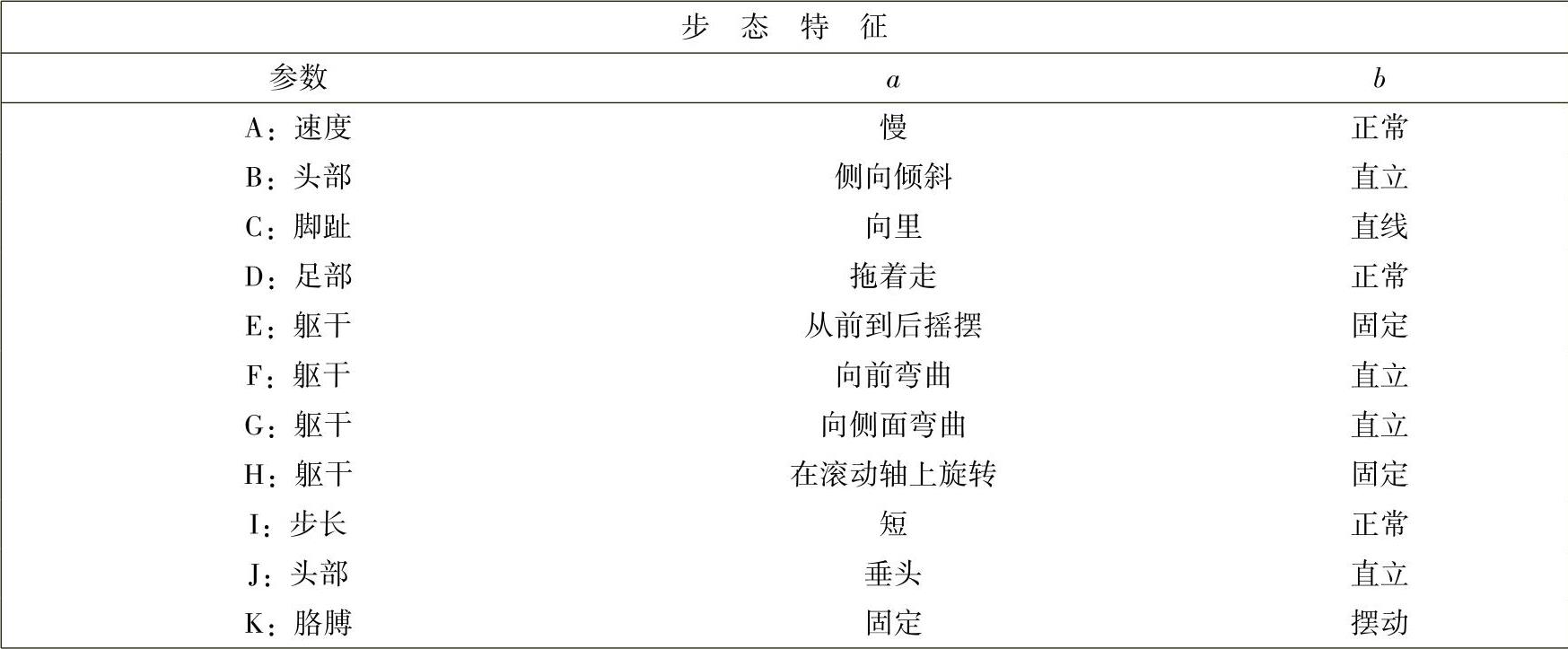
其中双足部分:
A:正常速度为1.28s/步,而慢速为1.92s/步。
B:头部的初始侧倾角设置为侧向倾斜20°。
C:脚趾的偏航角设置为-10°,脚向内。
D:制作拖曳着行走的足部,在摆动的中间阶段,脚趾在Z方向位置为0.02m。除此之外,在正常脚中脚趾在Z方向位置为0.10m。
2.变量分析
为了探索快乐和悲伤情绪下的双足行走,进行3D行走运动模拟。由模式生成器根据运动参数确定32个步行运动模式。软件使用Windows环境下的BorlandBuilderC++和OpenGL,可以记录3D情感行走的动画录像。然后,为了更逼真地展示出双足模型开始向前直行并且在最后一步绕偏转轴线向左转90°,播放所记录约15s的3D动画用于评估。在这项研究中,早稻田大学的17位本科生作为评价者,分为5个级别评估了每个情感行走模式,5个级别设为0点(最低点)~4点(最高点)。每个快乐模式(左图)及难过模式(右图)的点的总和如图6-8所示。
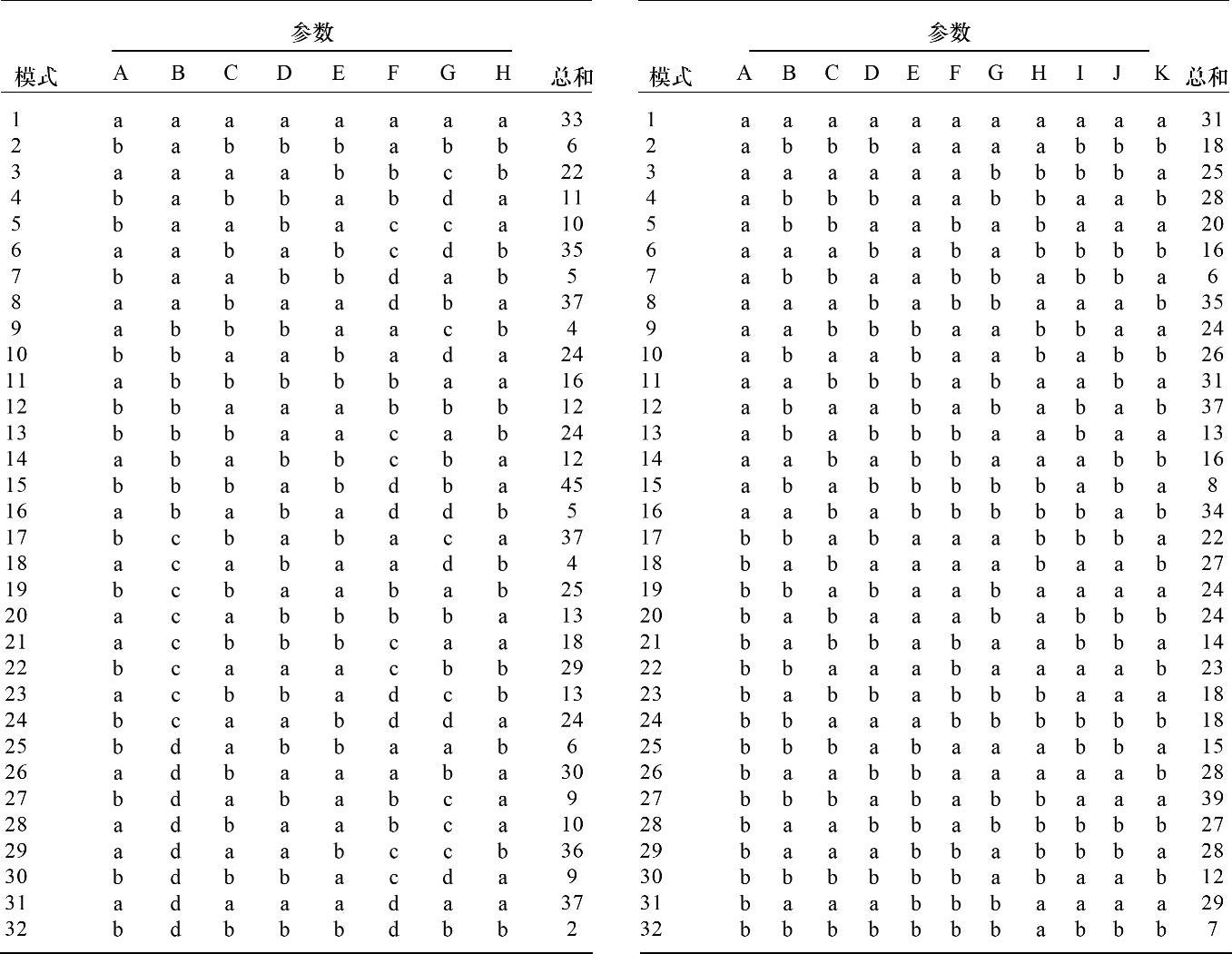
图6-8 快乐模式和难过模式的评估点
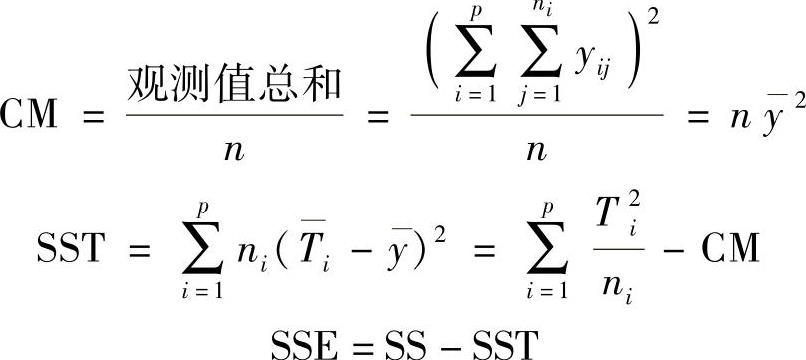
为了获得有效的情感行走模式,我们可以分析运动参数的方差值。其中,一组n个测量(情绪模式的数量)中的可变性与SS(偏差平方和)成比例。
SS=所有y值的平方和-CM
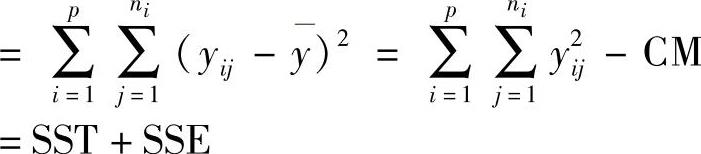
式中,yij和 分别表示i,j测量样本的方差和样本的平均值;CM和SST分别表示平方值和平方和的校正;SSE表示误差的平方和。式中,Ti是处理值的总数。
分别表示i,j测量样本的方差和样本的平均值;CM和SST分别表示平方值和平方和的校正;SSE表示误差的平方和。式中,Ti是处理值的总数。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





