对于双足步行机器人的情感来讲,由于只有通过其动作表演来表达其个性,所以相比带有表情机器头的机器人在情感的选择方面要狭窄得多,所选择的情感通过实验论证,只有“平静”、“喜悦”、“恐惧”、“愤怒”四个情感状态适合,而其他的情感状态有待于进一步的研究探讨。
在双足步行机器人情感建模当中,首先要寻找起始状态,因为所有的过程都需要一个起点。通过对自然人的情感状态理解,在没有外界刺激信号的作用下,人一般都会平静,对于双足步行机器人的情感设置也是一样的道理,因此双足步行机器人的初始状态被定为“平静”状态。而其他状态都是与“平静”状态双向相通,如图5-12所示。
那么其他状态之间的转化就需要通过平静状态来进行过渡,而不允许随意两个状态之间进行转化。图5-12所示外周的状态都属于间接相连,其中单弧形线表示这两个状态可以间接转化,而双向箭头表示这两个状态可以直接转化。
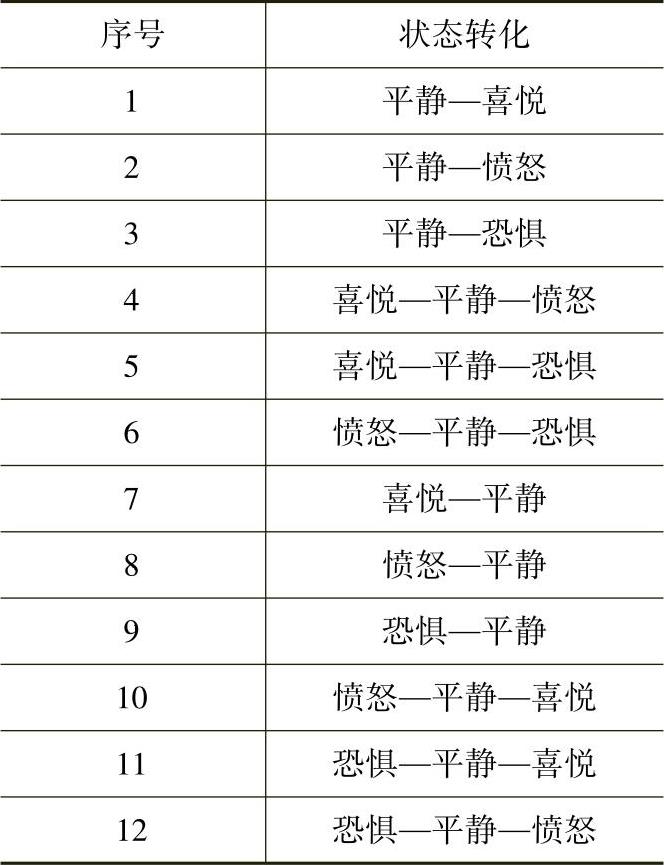
基本的状态转化划分见表5-1。
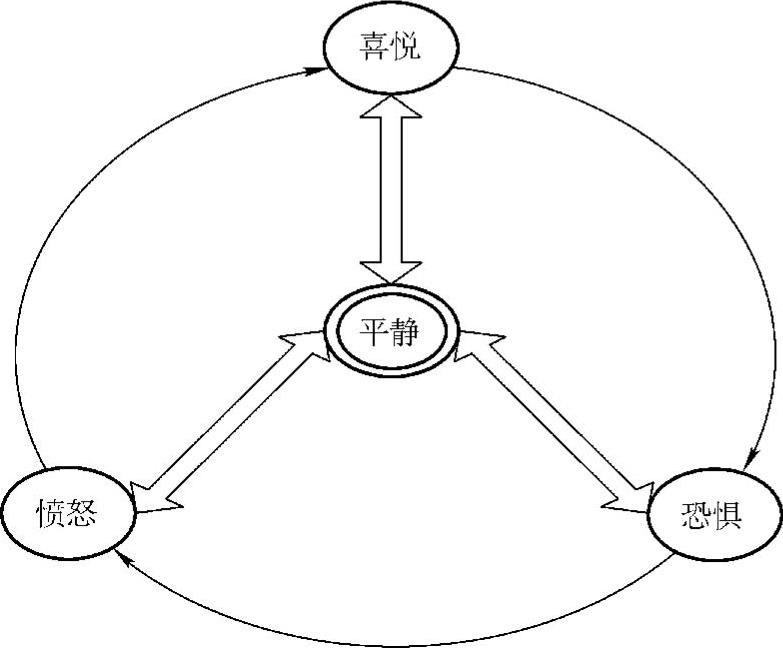
图5-12 情感状态模型
表5-1 基本情感的状态转化
 (https://www.daowen.com)
(https://www.daowen.com)
而具体的情况,则要比上述的基本情感状态转化要复杂并具有随机性。由此通过将上述12种基本情感状态为元素,来进行任意的组合搭配,就能大致模拟现实中的情感状态转移的情况。
行为决策设计如图5-13所示。

图5-13 行为决策设计
一般来说,对于双足机器人的情感转移控制以及行为实现可以大致分为三部分:信息采集融合层、行为规则层、决策层。首先,信息采集融合层包含了几种外界刺激信号进入的途径,其中包括语音方面的语音处理模块,图像方面的图像采集模块,通信方面的无线网络通信模块和红外超声等模块。在这里主要介绍的信息采集是通过语音处理模块来实现的。决策层的判断依据来自于数据库,然后通过数据库来连接行为规则层,最终连接到双足步行机器人的各个部分的伺服电动机。
由于语音数据库与情感方面的耦合还是处于初级阶段,数据库还无法随意地通过一句话而确定情感状态。例如:对于“今天天气不好”、“今天天气不错”等,语音数据库还无法直接通过里面的关键词来确定语句的褒贬,由此本章所介绍的语音数据库还处于人为设计阶段,也就是对应某个具体的语句,有相应的固定输出。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





