通信是机器人之间进行交互和组织的基础。通过通信,多机器人系统中各机器人了解其他机器人的意图、目标和动作以及当前环境状态等信息,进而进行有效的控制,协作完成任务。一般来说,机器人之间的通信如图5-6所示,可以分为隐式通信和显式通信两类。
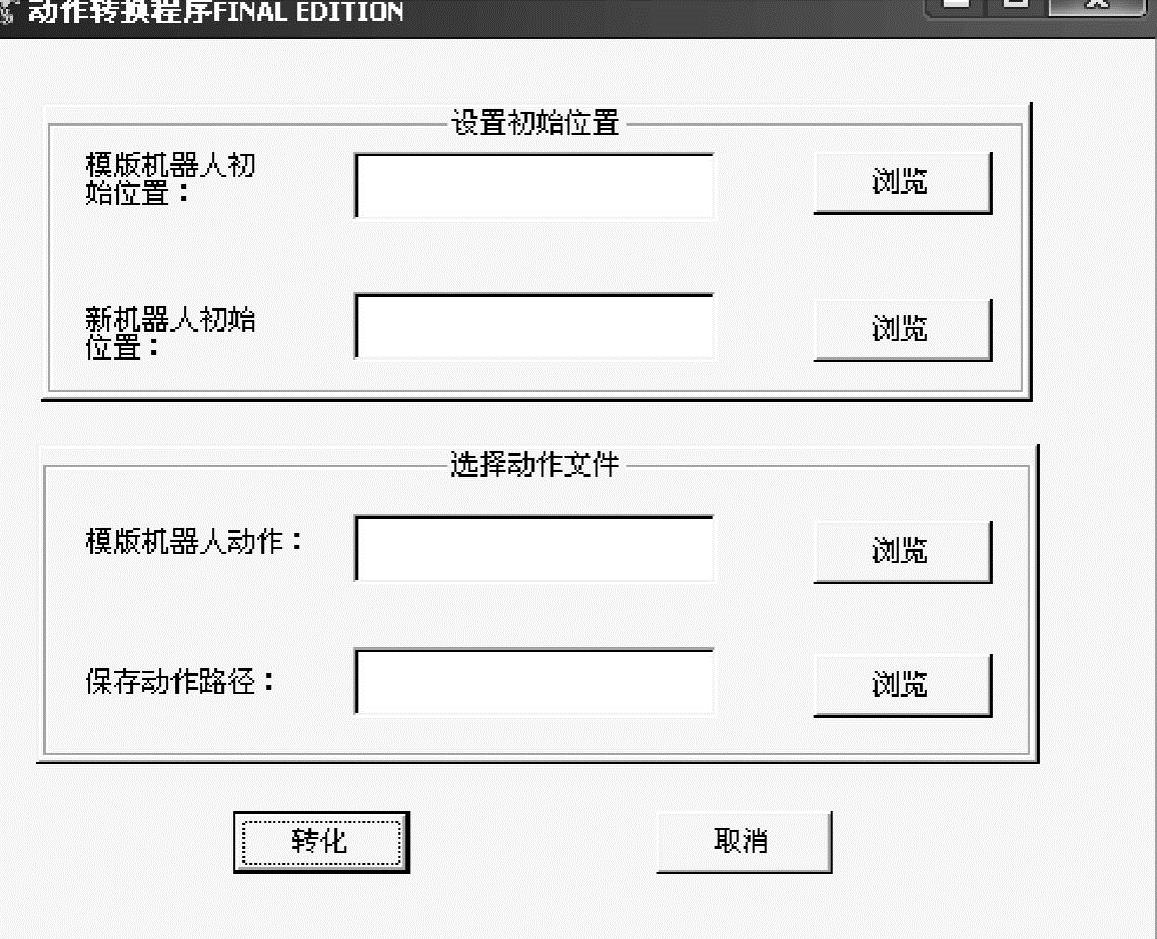
图5-5 新动作转化程序的运行界面
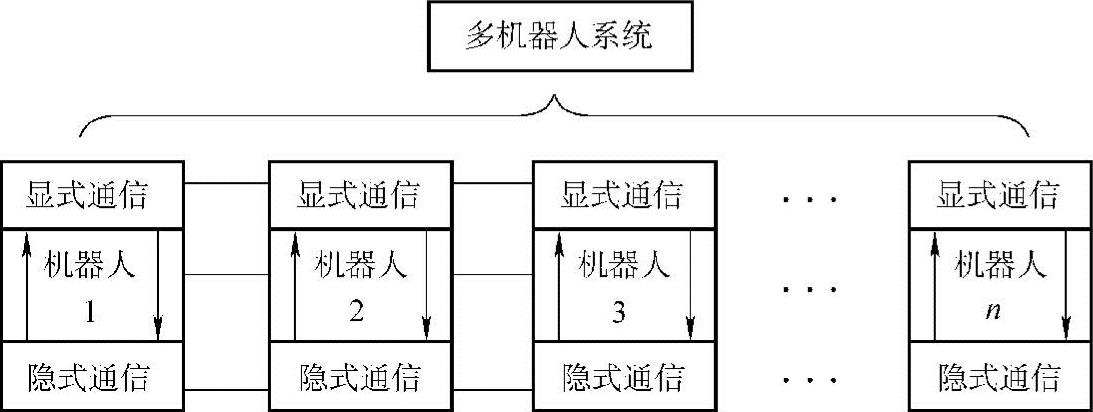
图5-6 多机器人系统的通信
使用隐式通信的多机器人系统通过外界环境、自身传感器来获取所需的信息,并实现相互之间的协作,机器人之间没有通过某种共有的规则和方式进行数据转移和信息交换来实现特定信息的传递。在使用隐式通信的多机器人系统中,由于各机器人相互之间不存在数据、信息的显式交换,所以多机器人系统可能无法使用一些高级的协调协作策略,从而影响了其完成某些复杂任务的能力。
使用显式通信的多机器人系统利用特定的通信介质,通过某种共有的规则和方式实现特定信息的传递,因而可以快速、有效地完成各机器人间数据、信息的转移和交换,实现许多在隐式通信下无法完成的高级协调协作策略。
与已有的通信系统不同,此系统不需一个中心服务器或基站的存在,符合分布式机器人系统的基本特点和要求,并通过共享无线通信通道的方式实现了机器人之间的数据通信。EiichiYoshida等人从通信容量和成本的角度对多机器人系统的局部通信进行了研究,提出了在许多机器人随机发送消息的环境中对多机器人系统局部通信效率进行优化的方法,以传输等待时间最小为目标,通过使用信息成功传送的概率进行分析计算,推导出了各机器人最优的通信范围。多机器人系统的显式通信虽然可以强化机器人之间的协调协作关系,但也存在以下问题:各机器人的通信过程延长了系统对外界环境变化的响应时间;通信带宽的限制使机器人之间的信息传递、交换出现瓶颈;随着多机器人系统中机器人数目的增加,通信所需时间大量增加,信息传递中的瓶颈问题更为突出。
隐式通信与显式通信是多机器人系统各具特色的两种通信模式,如果将两者各自的优势结合起来,则多机器人系统就可以灵活地应对各种动态未知环境,完成许多复杂任务。利用显式通信进行少量的机器人之间的上层协作,通过隐式通信进行大量的机器人之间的底层协调,在出现隐式通信无法解决的冲突或死锁时,再利用显式通信进行少量的协调工作加以解决。这样的通信结构既可以增强系统的协调协作能力、容错能力,又可以减少通信量,避免通信中的瓶颈效应。
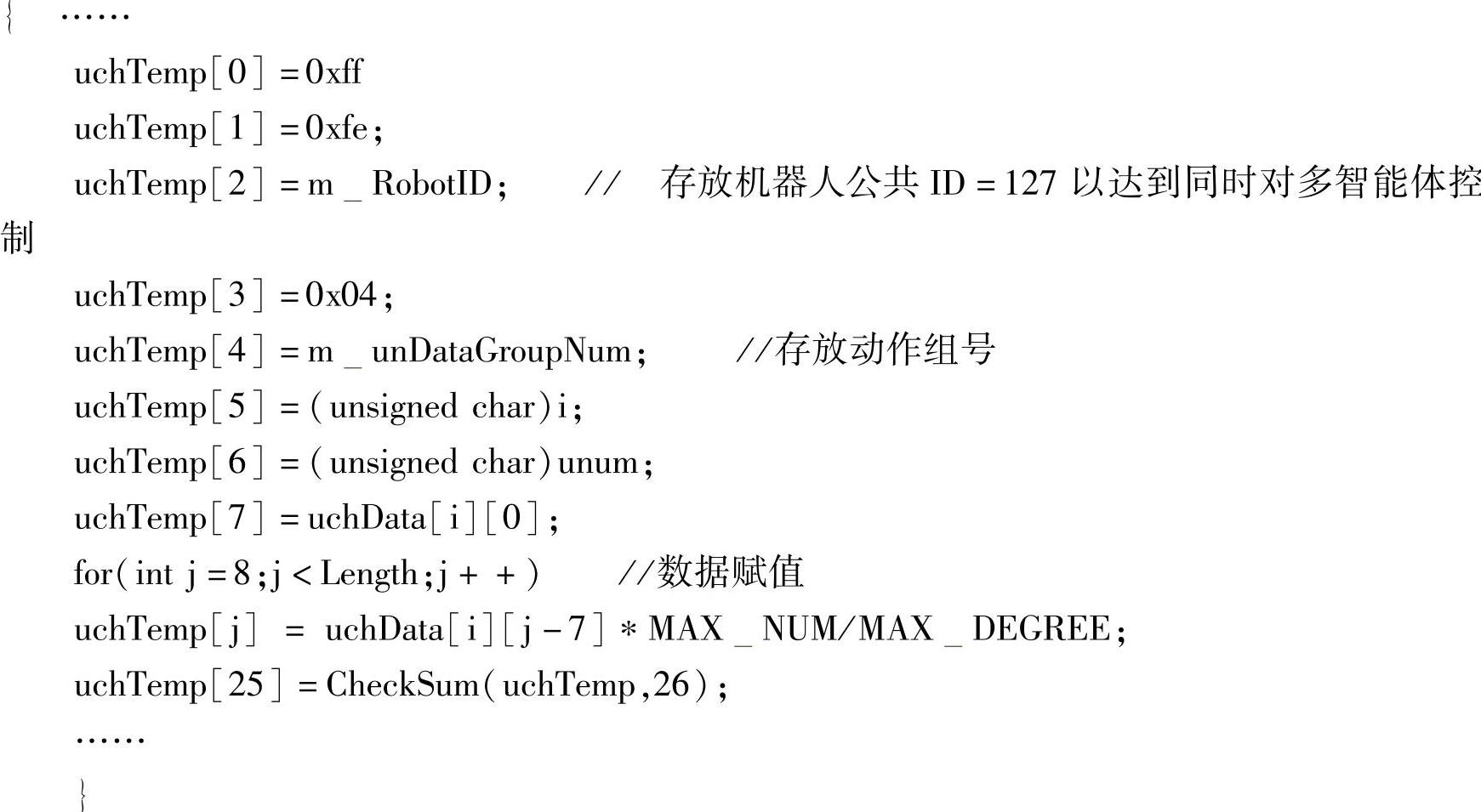
每个机器人其实对应的就是其中的单个智能体,通过上位机程序和无线通信模块来对多个机器人进行控制,实现了一对多的多智能体控制,发送数据的函数程序编写如下:DWORD CROBCONDlg::WorkThread() //发送数据(https://www.daowen.com)
每台机器人都有属于自己的ID号,每个ID号就如同它们自己的名字。在上位机界面中,当我们输入ID号时,相应的机器人就会作出动作,这就实现了“一对一”的控制。那么对于一对多的控制,我们规定了机器人公用的ID号,当我们输入公用ID号时,所有接通电源的机器人都会受到控制,这就是所谓“一对多”的控制。本书中,使用五台双足步行机器人完成协调动作表演,站位如图5-7所示。
在完成了同时对双足步行机器人的控制后,而“千手观音”的动作表演往往是分时间差的,那么需要引进“延时”的概念,如图5-8所示。让前排的机器人先动起来,后排的逐个再动,整体效果就出现了“千手观音”表演的效果,如图5-9所示。
图5-7 千手观音表演时的站位
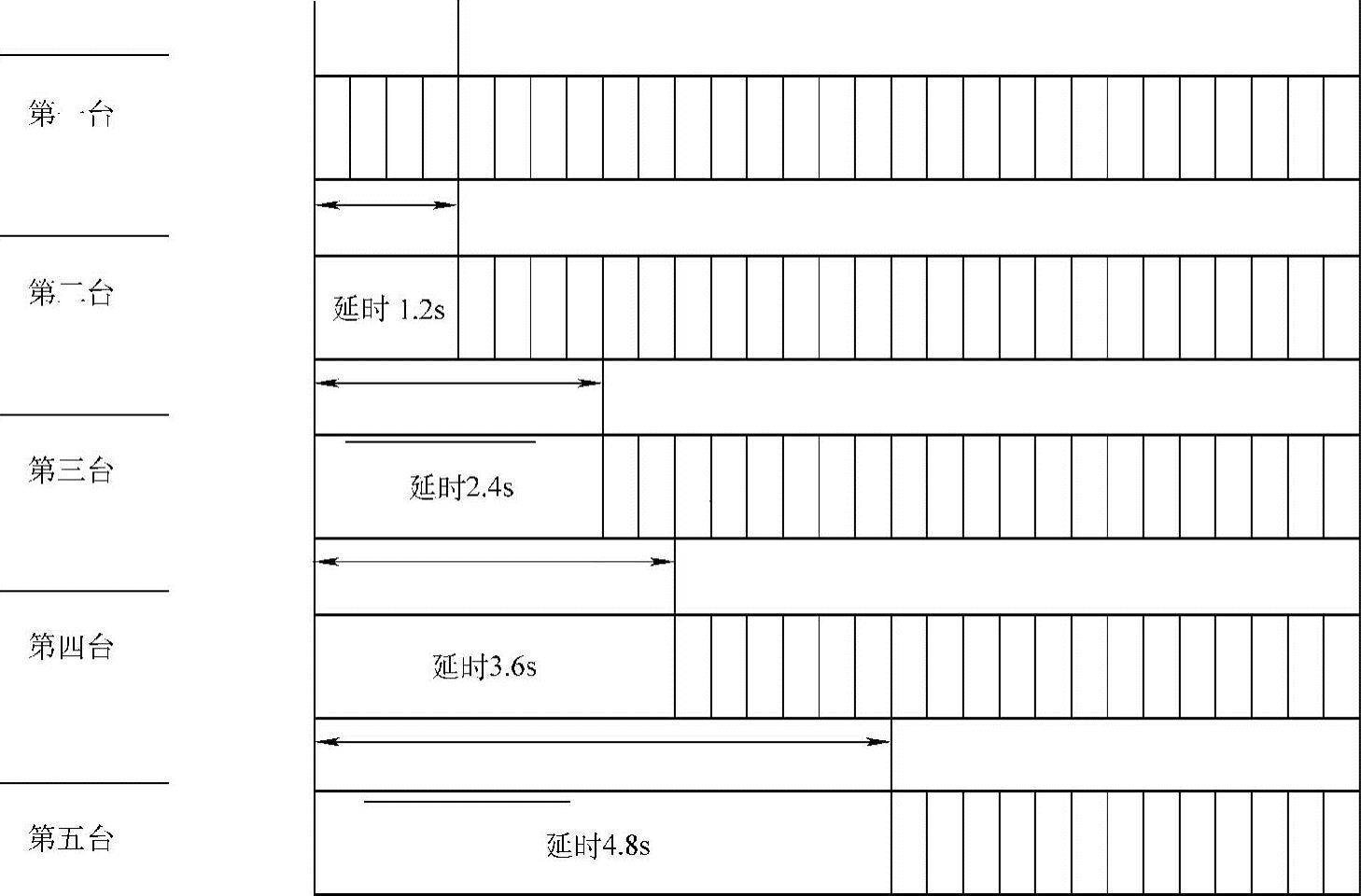
图5-8 延时思想设计千手观音动作
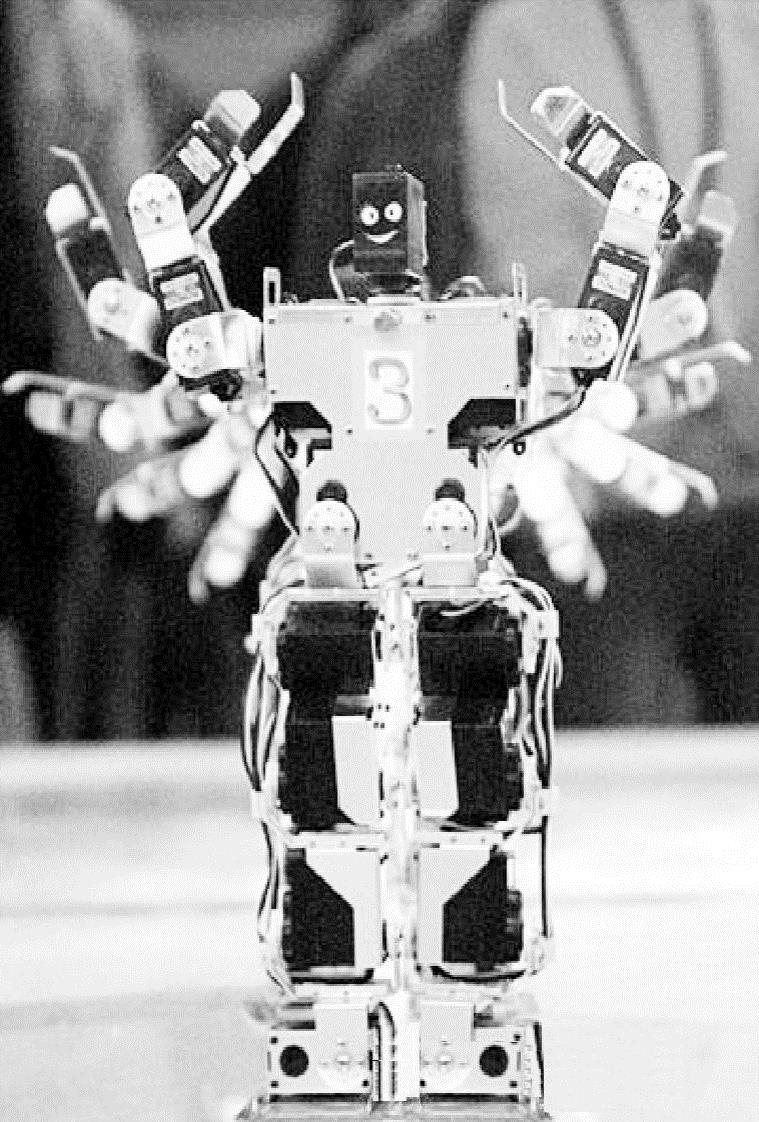
图5-9 千手观音表演时的效果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






