
上位机的控制端软件是双足步行机器人平台的重要组成部分,在整个系统中,为嵌入式系统发挥着后台支撑作用。PC的功能很强大,不管是硬件资源还是软件资源,嵌入式系统都无法和PC相比。有了这一强大的后盾,我们对机器人的操作将变得更加形象、便捷和丰富多彩。上位机软件由主界面、动作调试模块、基于音乐情绪的列表界面及情感动作数据库[6]、动作数据库、三维仿真模块和通信模块组成。软件的功能模块如图4-8所示。
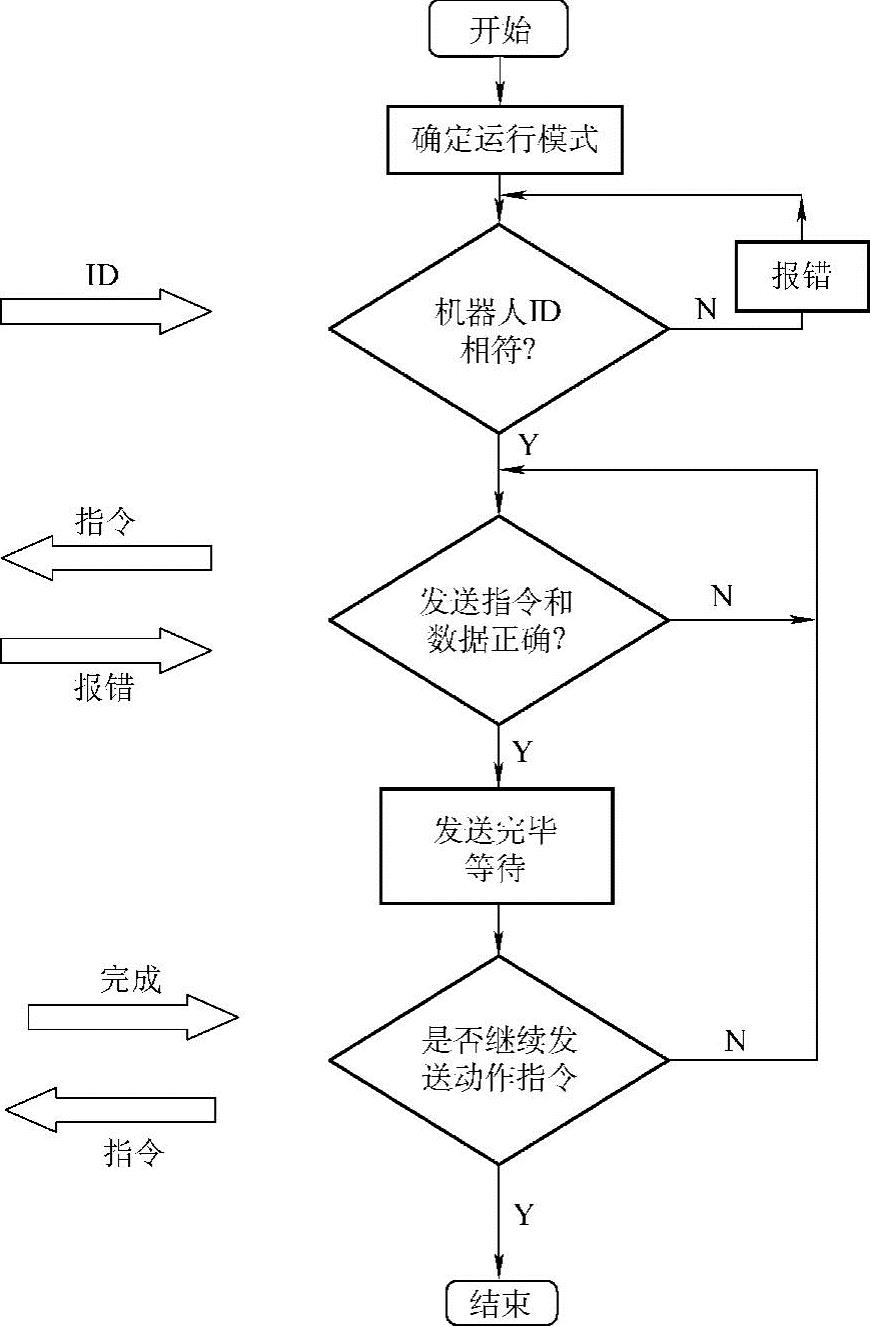
图4-7 控制端的工作流程及数据交互
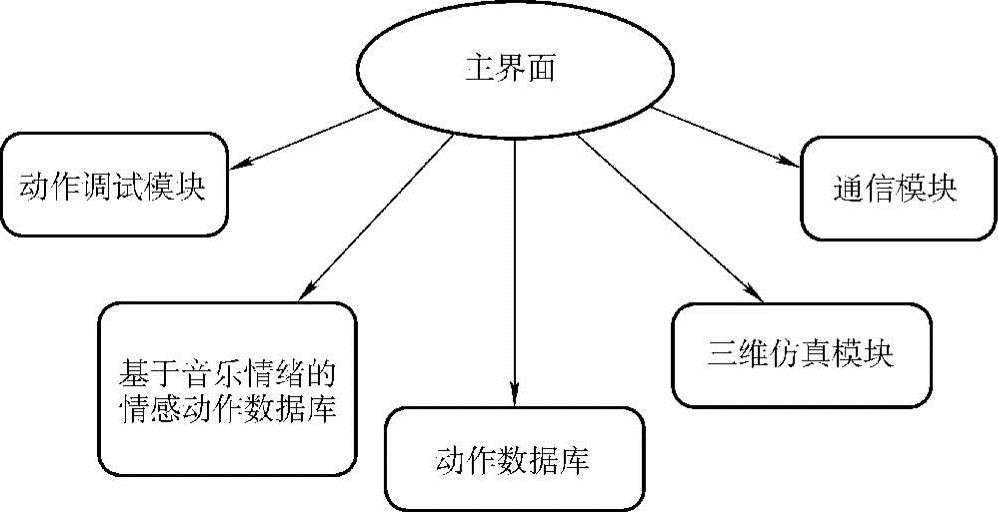
图4-8 上位机软件主要功能模块
下面,就对上位机软件平台的主要功能模块进行说明。
(1)主界面、动作调试及动作数据库 上位机主界面主要功能是进行机器人的初始位置以及动作调试;机器人端与PC控制端的串行口通信的开关及数据的监视;调试后的动作可以以.dat文件的形式保存实际控制角动作数据或者以相对动作数据保存在动作数据库中,如图4-9所示。
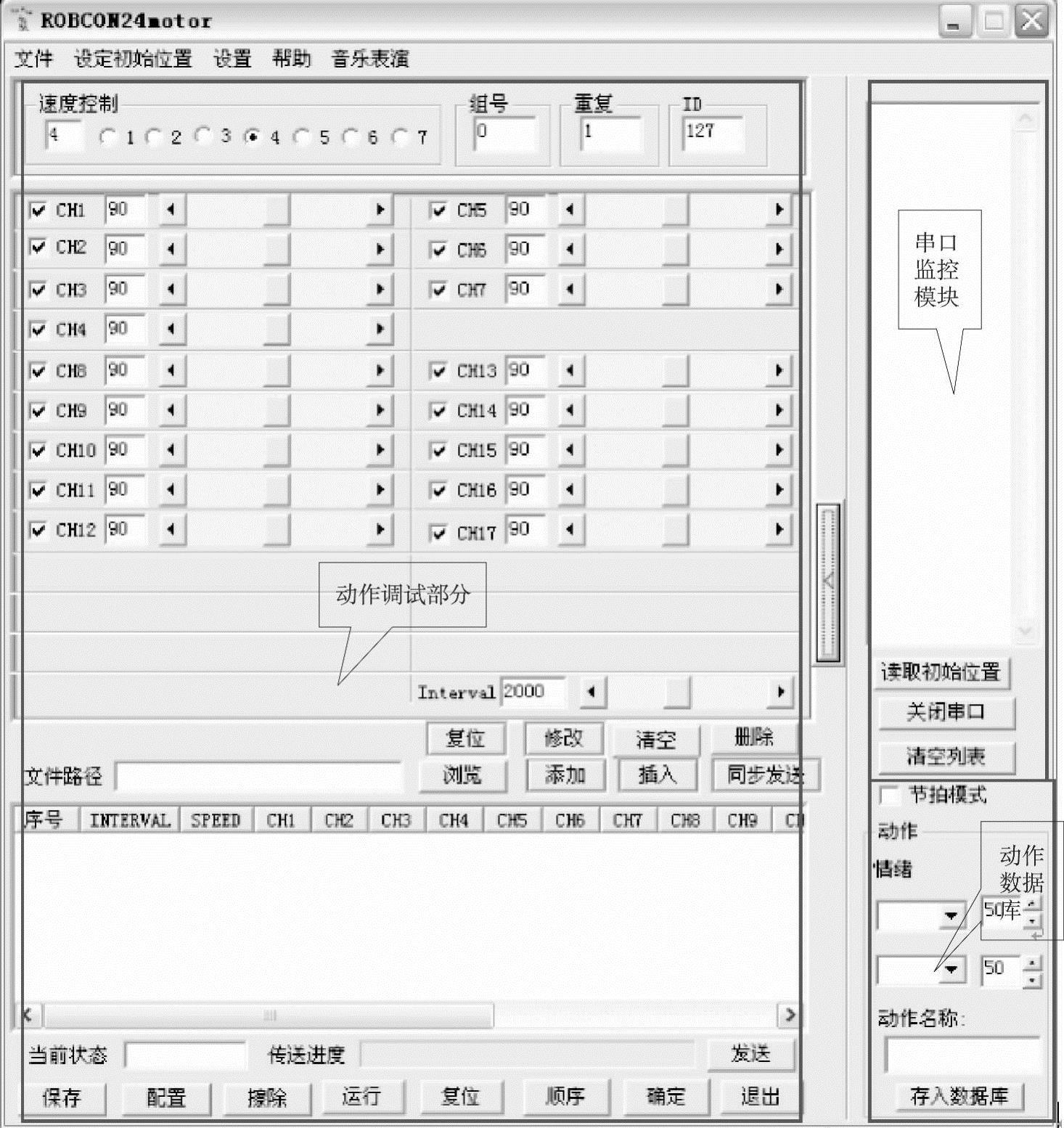
图4-9 上位机软件主界面(www.daowen.com)
(2)音乐列表界面及情感动作数据库 通过该界面可以播放音乐,管理基于情绪模型的音乐数据库[8],并可以根据音乐的音频快慢在情感动作数据库中查找到双足步行机器人的情绪参数,在动作数据库中查找与情绪系数最接近的动作组,自动地向机器人发送与所播放音乐情感特征相符的动作数据[9,10],如图4-10所示。根据操作者想表达的音乐情绪在数据库中显示与所选情绪最为接近的动作数据进行动作的编排[11],并且保存动作组。同时可以根据所选的机器人ID号查找数据库中的机器人初始位置,从而生成针对该机器人的动作数据组[12,13],如图4-11所示。
(3)三维仿真 根据双足步行机器人的实际结构建立的三维立体模型,可以在虚拟的环境中为双足步行机器人创作各种动作,如街舞、倒立等,再将得到的动作数据下载到双足步行机器人上,从而实现机器人的动作。
(4)通信 通过RS-232串行口控制双足步行机器人的动作演示,可以在线地编排双足步行机器人的动作,给双足步行机器人发动作数据,发送数据的同时,在串口监控模块窗口中显示发送错误的动作帧见图4-9,并重新发送该动作帧,以确保准确无误地发送动作数据。
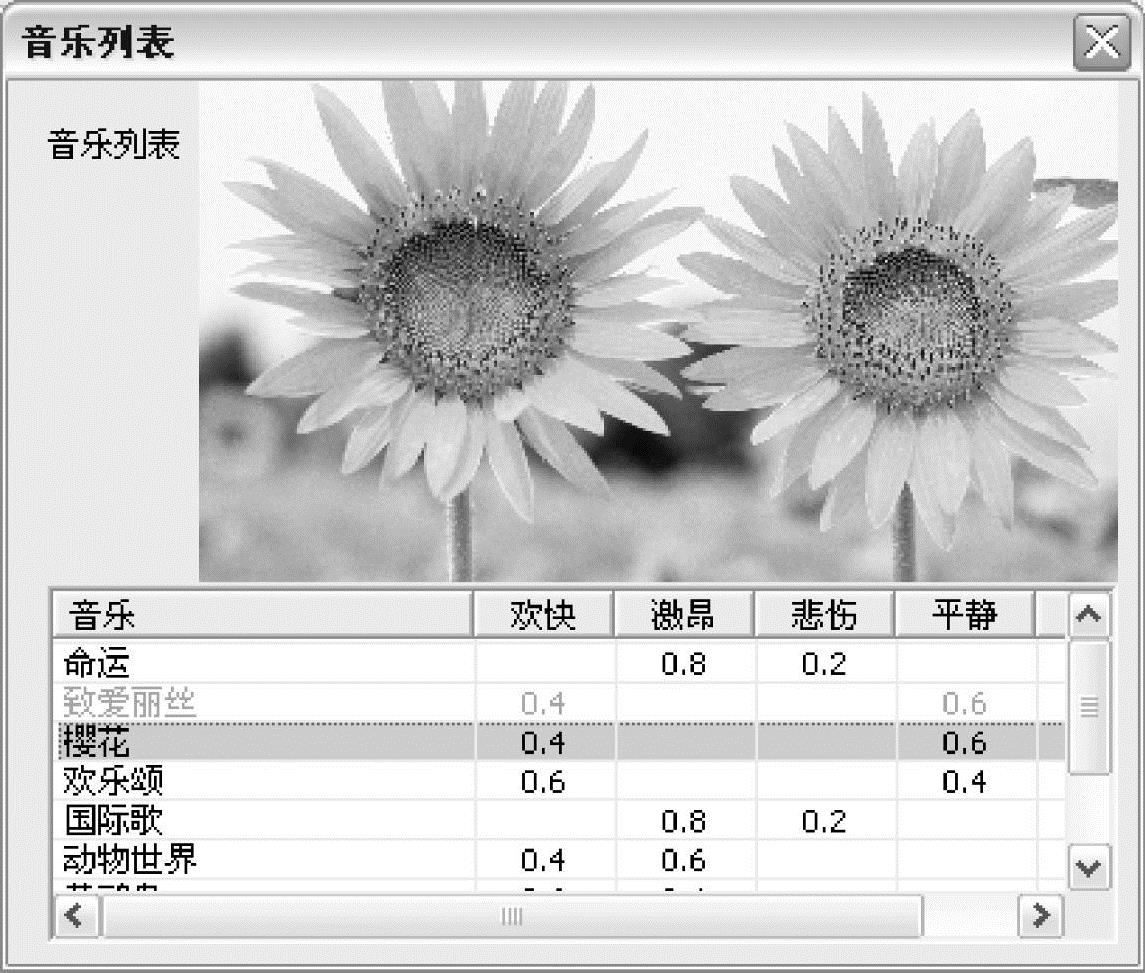
图4-10 上位机软件音乐情感界面

图4-11 上位机软件动作编排界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






