在机器人的安装过程中,由于关节的可移动性,使得组装后的机器人都有着各自不同的初始状态。在这种情况下,如果我们仍然采用同一参数对机器人进行初始化,则最终会发现,所有的机器人姿势各不相同,而原因就在于组装时的关节误差。因此我们提出了初始位置(Homeposition)的概念。
初始位置是机器人良好直立、腿部各舵机受力均匀时动作的名称。我们所调试完成的每一个动作数据(如上所述)的开始和最后的动作都是使用的这个动作。初始位置是在每个机器人安装完毕后,首先调试出的。通过对不同机器人的初始位置进行比较,我们不难发现它们基本上都有所不同,尽管这其中应考虑调解设定时的人为因素,但同时也说明每台舵机实现相同的角度都是不尽相同的,如图4-3所示为标准90°和显示90°实际带偏差舵机。
对机器人的操作中,初始化的设定有着非常重要的意义。对于我们来讲,不可能针对每一台机器人都重复同样的工作去调试数据,这样做不但浪费时间,而且未能在根本上解决问题的所在。
因此,如果不作任何处理,机器人动作数据的可移植性非常差,即编号为Z1的机器人某组已经调试成功的动作,直接应用在编号为Z2的机器人上效果可能非常不好,基本上需要重新做大量的调试工作。另外,如果某台机器人身上的某一舵机损坏更换,则其原来的某些动作数据也会因为舵机的更换而变得不能使用。
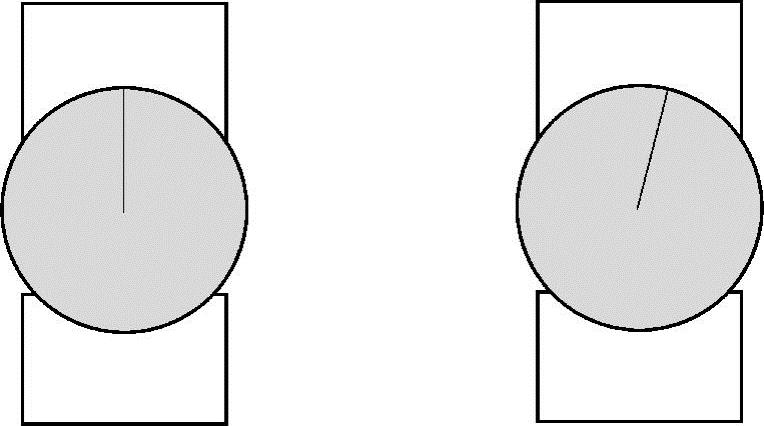
图4-3 标准90°和显示为90°实际带偏差舵机
为此,我们仍应用初始位置来解决。尽管由于工艺问题,每台舵机对于同一角度的位置并不相同,但是我们可以人为地进行校正,即把初始位置作为一个参考基准,而今后的所有动作只需要在此舵机角度上进行相应的叠加就可以完成,我们把与其进行叠加的动作数据称为给定控制角,也称相对数据,而下位机实际收到的数据是叠加后的结果,即实际控制角,也称绝对数据。三者之间关系如下式所示。(https://www.daowen.com)
实际位置角度(°)=相对转动角度(°)+初始位置(Homeposition)角度(°)
(4-1)
这样,我们无须因为舵机工艺的原因对于每台机器人的动作数据进行调试,而只需要调试出一台机器人的实际控制角动作数据,根据式(4-1)求出相对动作数据,即给定控制角,进而保存,就可以反向运用式(4-1)得到新的机器人动作实际控制角数据,只是需要注意,对于不同的机器人,使用公式时,初始位置项均应为对应机器人的实际值。关于设定初始位置的操作如图4-4所示。
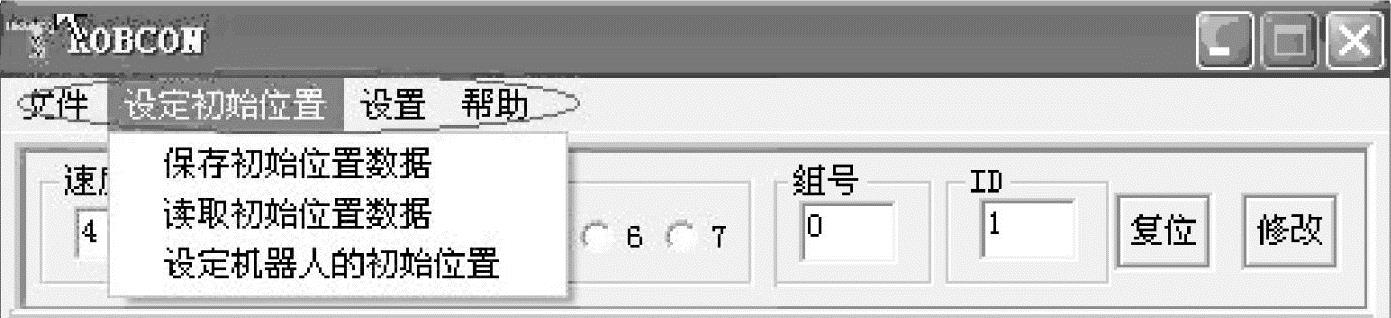
图4-4 初始化设定界面
因此我们需要设定这样一个初始数据,使得机器人的相对初始位置都是完全一样的。那么,同样一组数据,对于所有的机器人都可以使用,并做出同样的动作。这样不仅可以免去对每一台机器人都重复做同样的调试数据工作,节约了时间。另一方面,只要我们在初始位置的调试上对每台机器人都进行严格的规范,就可以同时保存多台机器人的初始位置,而只保存一套动作数据,通过动作数据与初始位置的简单计算,为多个机器人提供统一的动作数据,使机器人的动作数据具有通用性,从而达到动作标准统一。这是我们进行多机器人表演时动作质量的保证。初始位置、相对动作、机器人动作数据以及与音乐、节拍、情绪状态的关系如图4-5所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






