【摘要】:小型双足步行机器人由于体积和电源(电池)的供电能力有限,因此对电路的结构、元器件的布线和布局都有较高的要求。下层 实现控制算法,控制多路舵机协调运动,其控制系统可以分为以下几个模块:1)电源模块:向下位机系统各模块提供稳定的电压。5)电动机驱动模块:由PIC16F877主微控制器组成,实现控制算法、下位机协调和控制多路舵机控制信号的生成。图4-2 控制系统的总体结构框图
小型双足步行机器人由于体积和电源(电池)的供电能力有限,因此对电路的结构、元器件的布线和布局都有较高的要求。对于这种要求,本书给出了模块化的系统构成,各个功能模块之间相对独立。同时,模块间通过接口的衔接来组成完整的系统。控制系统的总体框图如图4-2所示。
控制系统采用多级分布控制方法,分为上、下两层控制,其功能分别为:
(1)上层 PC,完成机器人行为数据的离线计算和调整,通过有线或者无线网络控制和协调各个机器人的动作行为,并且可以通过机器人所带的传感器获取环境信息。
(2)下层 实现控制算法,控制多路舵机协调运动,其控制系统可以分为以下几个模块:
1)电源模块:向下位机系统各模块提供稳定的电压。
2)数据存储模块:由I2C总线的串行E2PROM(24C512)组成,PIC16F877通过I2C总线对其进行读写操作。(www.daowen.com)
3)有线通信模块:由SP3232电平转换芯片实现,通过RS232串行总线实现上、下位机的数据交互。
4)无线通信模块:由nRF905射频芯片和STC2051微控制器组成,通过射频(RF)实现上、下位机的数据交互。
5)电动机驱动模块:由PIC16F877主微控制器组成,实现控制算法、下位机协调和控制多路舵机控制信号的生成。
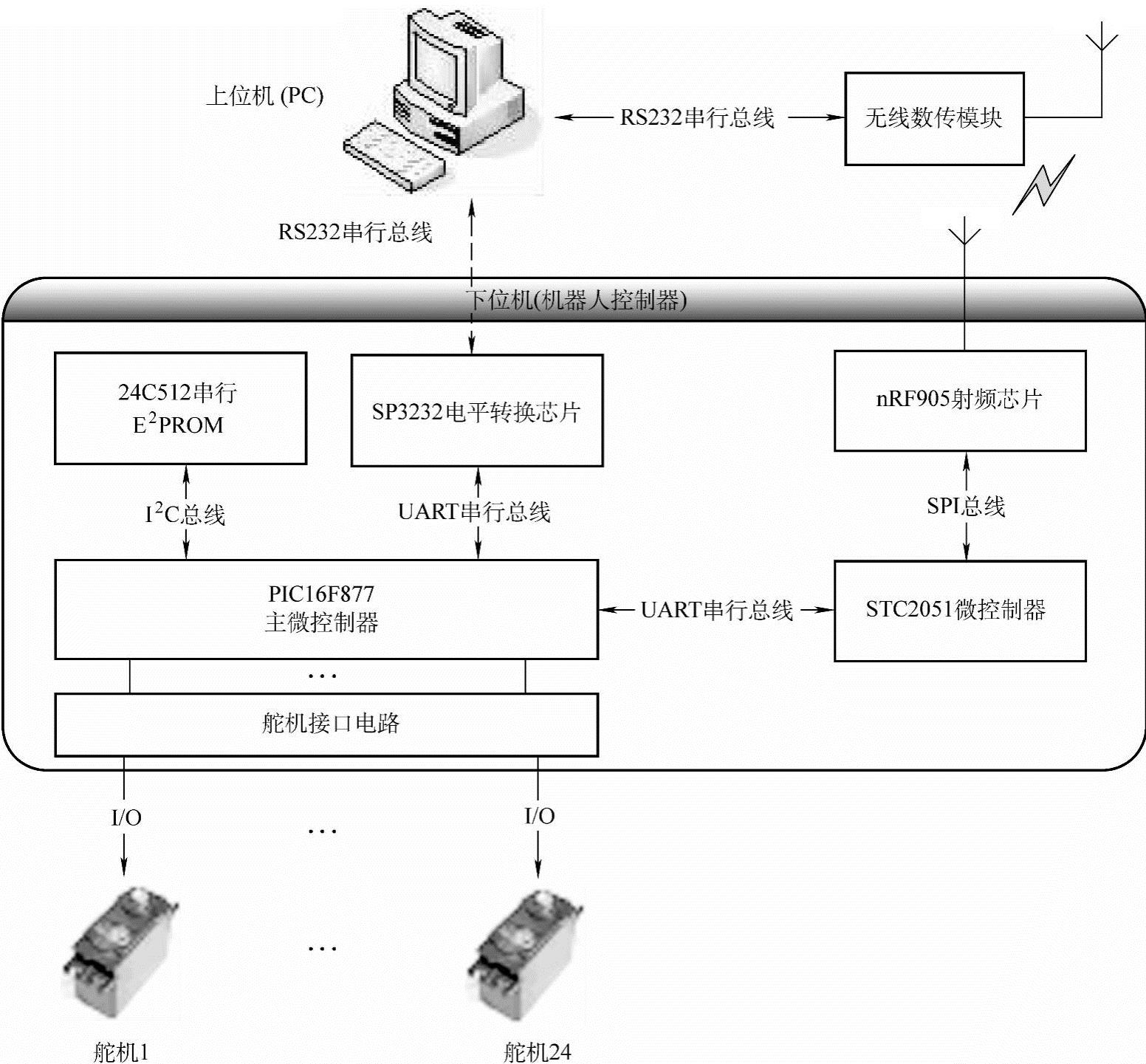
图4-2 控制系统的总体结构框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关双足步行机器人的文章






