步行是大多数动物所具有的移动方式,也是生物界步行方式中自动化程度最高、最为复杂的动作,它的完美实现必然要求机器人在结构设计方面产生巨大的变革和创新,从而有力地推动相关学科的发展。人类一直梦想着创造出与其构造相似、能和人类合作的拟人型机器人。而双足步行机器人是工程上少有的高阶、非线性、非完整约束、强耦合性的多自由度系统,这为机器人运动学、动力学以及控制理论的研究提供了一个理想的实验平台。
机器人步行的形式主要有双足步行、四足步行和六足步行[1]。其中双足步行是步行方式中自动化程度最高、最为复杂的系统,同时双足步行机器人也有着其他机器人不可比拟的优点:具有适应各种地面和较强的逾越障碍的能力:步行机器人的功耗较小,通常低于轮式和履带式机器人。随着对双足步行机器人研究的不断深入,无论是影视、科幻作品还是人们对机器人的第一意识,都把像人一样的机器人作为机器人研究的最高境界。机器人的研究者也一直把实现机器人的拟人行为作为梦寐以求的目标。拟人机器人是一种智能的、机动的、能满足用户多种需求的新型机器人,这种机器人具有人的外形和基本功能,易与人共处,适应多变的活动环境。20世纪90年代前后,双足步行机器人从一般性的拟人腿部行走上升到全方位的拟人机器人研究。拟人机器人除了腿部的行走功能外,还包括手、腰和头的功能,自由度比双足步行机器人成倍地增加,与此同时也带来了控制规划、动力学、运动学上更为复杂的问题。此外,还有CCD图像处理、语音处理以及一系列传感信号的处理。拟人机器人相对于双足步行机器人的研究,更为类似人类。拟人机器人是由仿生学、机械工程学和控制工程学等多学科相互融合而成的综合性学科[4]。
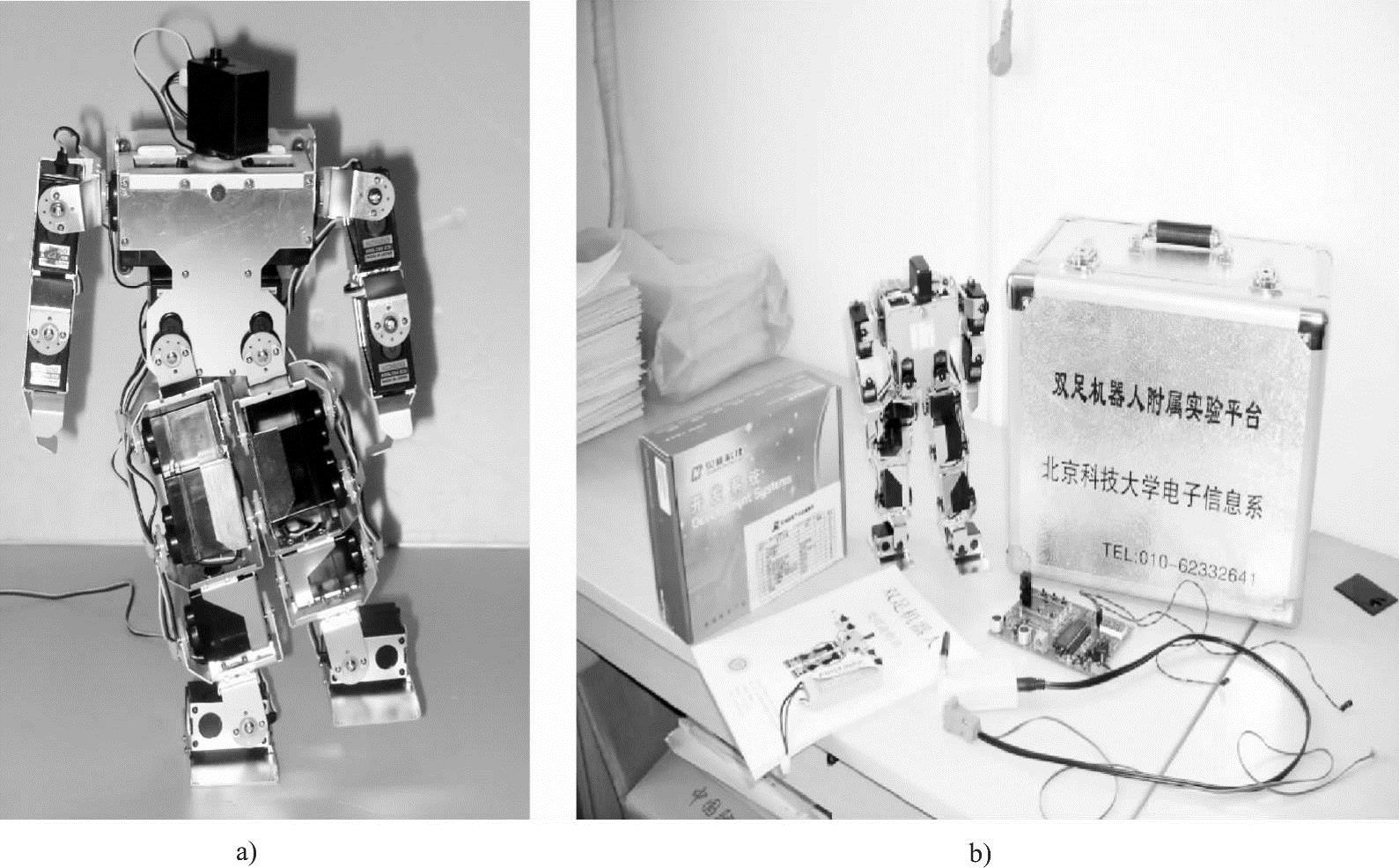
双足步行机器人的发展也为人类假肢的发展提供了有力的理论和技术支持,同时也为服务、娱乐机器人的发展开辟了新的领域[2,5]。随着机器人的工作环境和工作任务的复杂化,双足步行机器人因其体积相对较小,对非结构性环境具有适应性较好、避障能力强、功耗低、移动盲区很小等优良的移动品质格外引人注目。拟人机器人不仅具有双腿、双臂、头、眼、颈、腰等物理特征,还能模仿人类的视觉、触觉、语言,甚至情感等功能[3]。这和能在特种环境下工作的服务机器人是有区别的。图4-1b为北京科技大学所研制开发的双足步行机器人实验平台,该平台由双足步行机器人、PIC单片机调试器、传感器实验板、无线/有线发射模块等几部分组成。通过前面章节的介绍和分析,我们已经掌握了双足机器人的基本理论、方法和相关的支撑技术,下面就根据这些知识点,结合本书所设计的实验平台,进行有针对性的实际环节的学习。
 (https://www.daowen.com)
(https://www.daowen.com)
图4-1 双足步行机器人平台
a)双足步行机器人外形 b)双足步行机器人实验平台
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





