多智能体系统的重要特征是智能体间的协调与协作[7]。协调是指一组智能体完成一些集体活动时相互作用的性质,是对环境的适应。在这个环境中存在多个智能体并且都在执行某个动作。协调一般是改变智能体的意图,协调的原因是由于其他智能体意图存在[8]。协作是非对抗的智能体之间保持行为协调的一个特例。当单个智能体无法独立完成目标时,需要其他智能体的帮助,这时就需要协作。协作通常建立在协调的基础上,在复杂的环境下,完成不同目标的智能体必须对其目标、资源进行协调。
协调与协作的实现都离不开通信[10]。本节研究和实现了机器人通信系统的物理传输的底层问题,并讨论采用多智能体技术设计和实现多个类人机器人信息调度与通信系统的软件,提供良好的通信平台以实现总体控制功能。
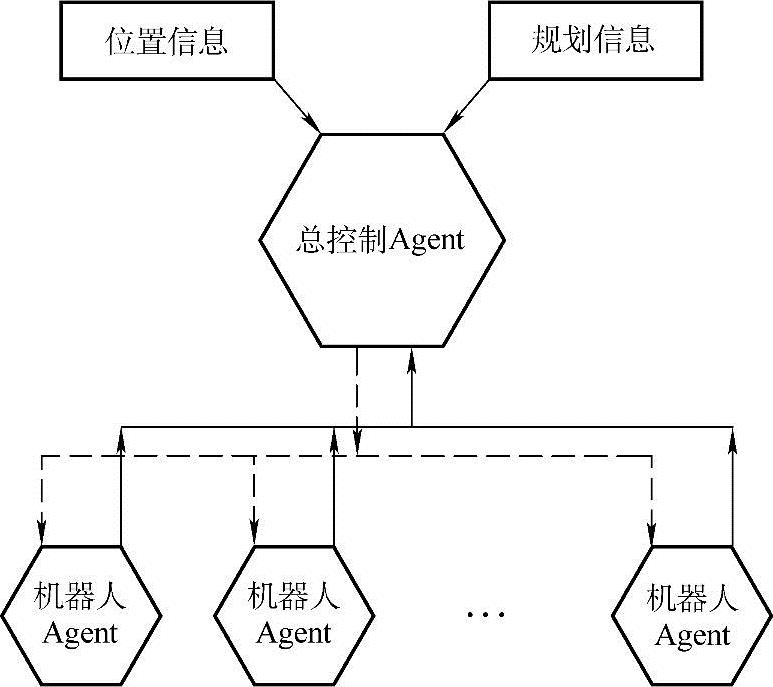
在多机器人环境下,机器人间的协作包括两部分:机器人的任务分配和机器人内部的子目标规划。任务分配将全局目标分解并分配给系统内的一组机器人来执行。为了实现机器人间以及机器人内部功能Agent的实时协作,需要构建与控制体系结构相适应的协调控制模型见图3-5,并采用合适的实时任务调度算法[11]。本节介绍协作的底层任务分配和调度,不涉及高层的协作策略。
 (www.daowen.com)
(www.daowen.com)
图3-5 多机器人系统的通信系统网络结构模型
多智能体系统的重要特征是智能体间的协调与协作。协调是指一组智能体完成一些集体活动时相互作用的性质,是对环境的适应。在这个环境中存在多个智能体并且都在执行某个动作。协调一般是改变智能体的意图,协调的原因是由于其他智能体意图存在。协作是非对抗的智能体之间保持行为协调的一个特例。当单个智能体无法独立完成目标时,需要其他智能体的帮助,这时就需要协作。协作通常建立在协调的基础上,在复杂的环境下,完成不同目标的智能体必须对其目标、资源进行协调。
多智能体技术实现多个类人机器人信息调度与通信,提供良好的通信平台以实现总体控制功能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







