智能体通过传感器感知环境,通过效应器作用环境,传感器相当于人的眼、耳、鼻及其他器官,效应器相当于手、腿、嘴、身体。智能体的工作过程如图3-3所示。智能体不仅要与环境交互,还需要对信息进行解释和处理。其中,信息融合以适当方式对接收到的信息进行处理。信息处理过程是智能体的核心,它反映了智能体的真正功能。
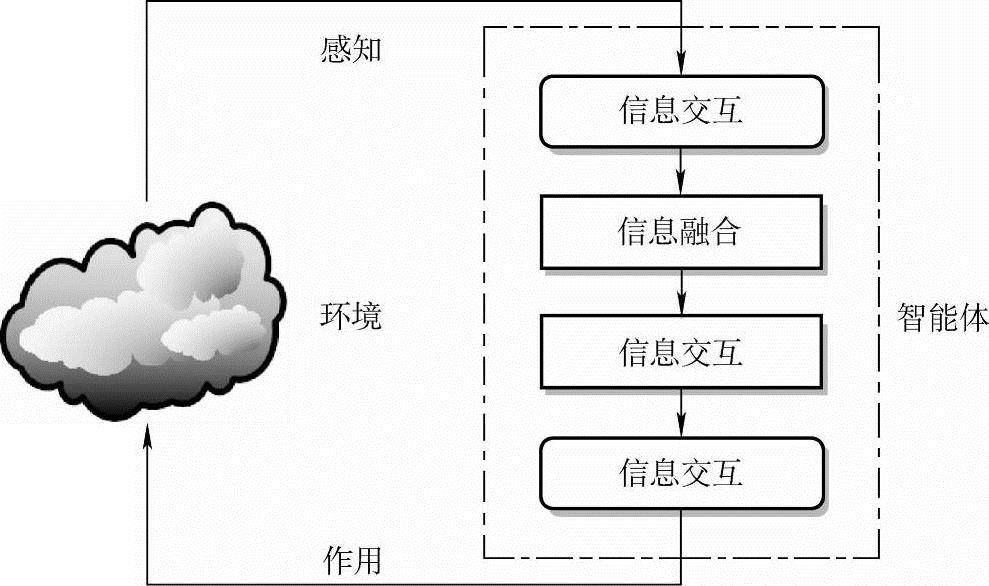
图3-3 智能体的工作过程
智能体(Agent)是指那些宿主于复杂的动态环境,自主感知环境中信息,并采取行动,实现一系列预先设定的目标或任务的计算机系统。它具有推理和学习能力、自主与协同工作能力、在所处环境中的灵活访问和迁移机制以及同其他智能体(Agent)的通信和协调机制,概括起来就是智能性、代理性和机动协调性。该技术最早出现在人工智能领域,其最大特点是具有一定的智能及良好的灵活性和坚定性,特别适合处理复杂、难以预测的问题。基于智能体的控制模型是一种拟人化的模型,可将控制系统的行为和其他扩展单元的行为统一起来构成分布式多智能体系统。
多智能体系统(Multi-Agent System)是由多个可计算的智能体组成的集合,它能协调一组自主体的行为(知识、目标、方法和规划等),协同完成动作[1,2]。学习是多智能体系统的重要特征之一,多智能体学习可以看做是多智能体系统和机器学习等研究领域的结合。强化学习是一种以环境反馈作为输入的适应环境的机器学习方法。它不需要对环境的先验知识,具有无监督的自适应能力,因而被认为是设计智能体(Agent)的核心技术之一。(www.daowen.com)
多智能体系统是针对一群不同种类的、自治的智能体的群体行为所进行的研究,这些智能体可能为同一目标共同工作,也可能为存在潜在冲突的各自不同的目标工作[3]。这方面的研究主要受分布式人工智能理论和人工生命系统的影响,其研究的中心问题可以概述为一句话:“在一个只有我们所设计的智能体的世界中,智能体是如何与其他智能体进行相互作用的”。在具体的研究工作中,多个智能体之间如何协调运用各自的知识、目标、技能和计划共同采取行动、解决问题,是一个重要的研究内容。多智能体系统的应用分类如图3-4所示。从图中可以看到,多机器人系统的研究与多智能体系统研究是密切相关的。多机器人系统为多智能体系统理论应用于实际环境中提供了实验平台,同时多智能体系统理论的研究为多机器人系统和多机器人协调协作提供了理论基础[4]。
近年来,随着机器人Agent模型在多机器人协调中的应用以及为了解决多机器人合作所存在的问题,基于分布式人工智能中多智能体系统(MAS)理论(见图3-4)的多机器人协作已成为机器人学研究领域的热点,受到各国专家学者的普遍关注。依据MAS的特性,组织和控制多个机器人,使之能合作完成单个机器人无法完成的复杂任务,其主要考察的是系统的智能行为,因此它不同于一般的控制系统而必须具有实时智能[5]。
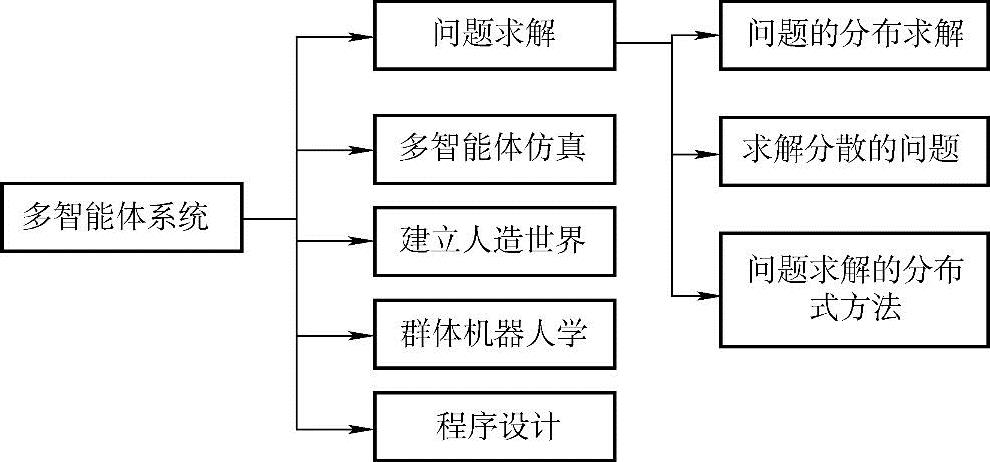
图3-4 多智能体系统应用分类
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







