【摘要】:在建立虚拟样机模型过程中,如果简单地通过Mechanism/Pro将已经设计完成的Pro/E模型数据转换到ADAMS中,在建立ADAMS模型时总是由于部分零件的缺失、装配关系错误导致整个模型无法正确显示。这是由于一些比较复杂的零件模型转入ADAMS后特征点和读取的路径缺失,从而造成数据传递只有质量、惯性等物理信息存在,而刚体却并不显示所造成的。TransferToView.adm是ADAMS数据设置文件,它记录ADAMS的模型数据。图3-2 零件和模型的完整传递流程图
在建立虚拟样机模型过程中,如果简单地通过Mechanism/Pro将已经设计完成的Pro/E模型数据转换到ADAMS中,在建立ADAMS模型时总是由于部分零件的缺失、装配关系错误导致整个模型无法正确显示。这是由于一些比较复杂的零件模型转入ADAMS后特征点和读取的路径缺失,从而造成数据传递只有质量、惯性等物理信息存在,而刚体却并不显示所造成的。
为了实现拟人机器人模型的数据转换,在对模型数据转换过程的反复观察和实践后发现,Mechanism/Pro传递数据的实质是将装配体的各零件以Stereolithography(.stl)或Ren-der(.slp)格式输出的同时,产生两个记录文件transferToView.adm和aview.cmd。
TransferToView.adm是ADAMS数据设置文件,它记录ADAMS的模型数据。主要内容为:装配体名、ADAMS地面信息、ADAMS零件位置信息(密度、转动惯量、MARKER数量和位置)、单位制等。
aview.cmd是ADAMS的命令文件,它记录ADAMS的操作命令。主要内容规定:AD- AMS的单位制(长度、质量、力、时间、角度、频率),读取模型的数据类型、路径、名称、比例、坐标、隶属关系,模型显示状态等。(www.daowen.com)
这两个文件在传递过程中对零件在ADAMS中的生成和定义起了决定性的作用。如果在传递过程中将完整的零件特征、装配信息输入这两个文件中,就可以实现零件和模型的完整传递,如图3-2所示。
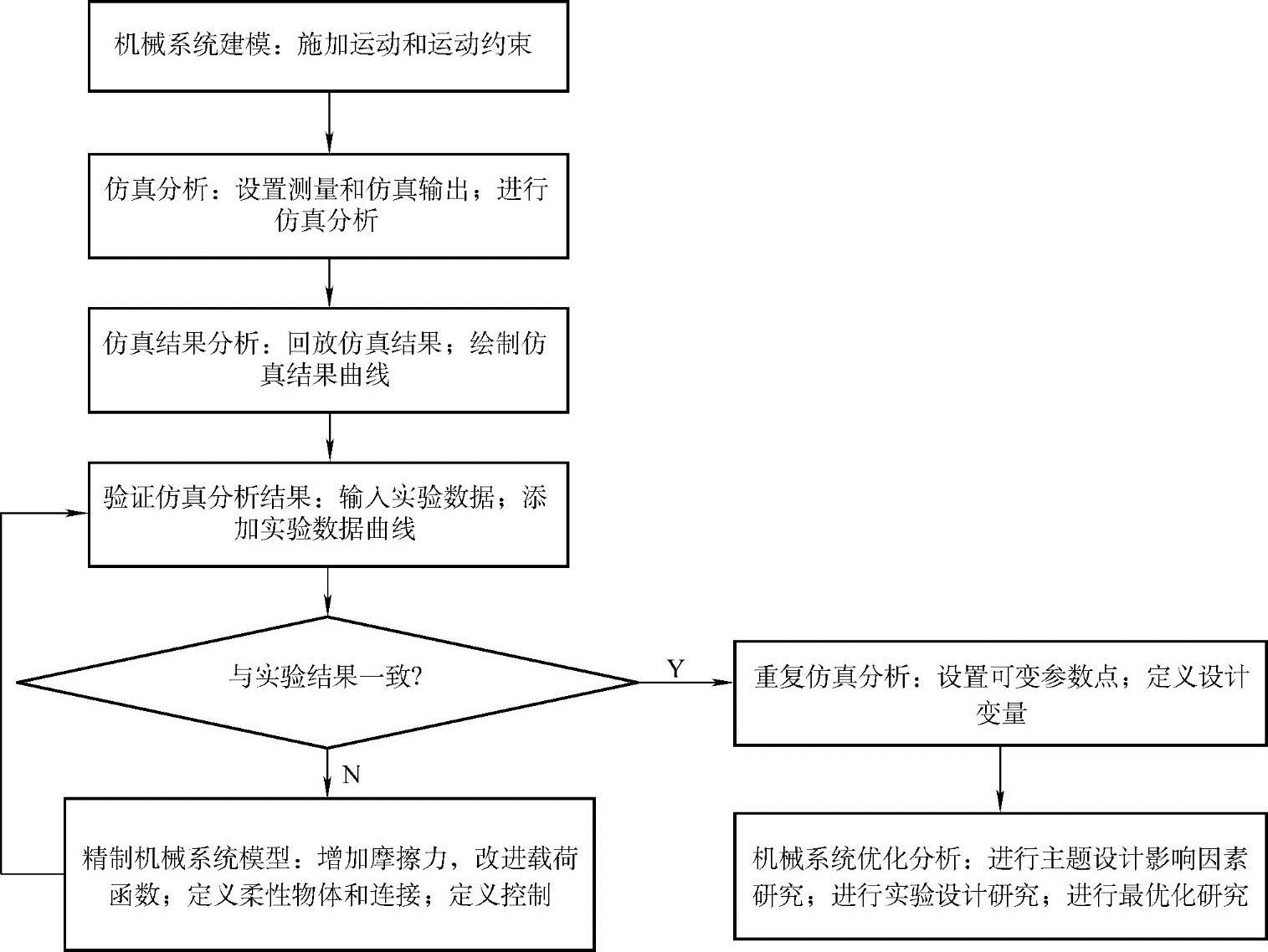
图3-2 零件和模型的完整传递流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





