双足步行机器人研究的一个关键问题是实现其稳定地行走。目前世界上大多数双足步行机器人系统都采用ZMP作为稳定行走的判据。ZMP即零力矩点,是由前南斯拉夫学者Vukobratov(简称伍氏)提出的关于步行稳定性的经典理论,他研究了ZMP与双足动态系统之间的关系,提出ZMP是判断动态平衡的一个重要依据。ZMP是这样描述的:ZMP是地面上的一点,重力和惯性力对这一点的力矩,其水平分量为零。也就是说整个系统对于这个点的前向、侧向的倾翻力矩为零。他指出,当双足机构处于动态平衡时,ZMP和脚底所受地面反力的压力中心(Center of Pressure,CoP)是重合的。因此我们可以根据检测到的地面反力信息,计算CoP,通过控制策略调整ZMP和CoP的位置,使二者重合,实现机器人的动态稳定行走。
作用在机器人脚底的实际地面反力(包括垂直反力和摩擦力)作用点如能与期望ZMP重合,并落在支撑面上,则对于机器人无翻转力矩,从而使机器人处于稳定行走状态。
期望ZMP计算公式
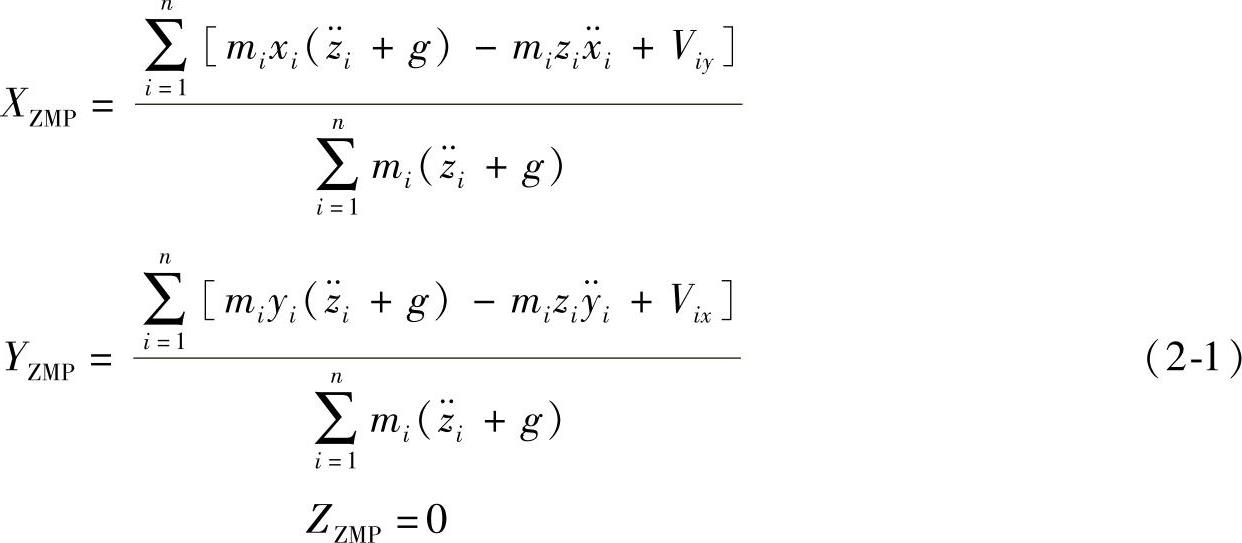
式中 x、y、z——机器人身体各部分质心坐标;
mi——机器人身体各部分的重量;
Viy、Vix——关节驱动力。
XOY在脚底板所在平面,Z轴垂直地面向上。
实际ZMP计算主要由六维力/力矩传感器进行测量获得。
机器人脚底的实际ZMP点和期望ZMP点的分布示意如图2-2所示。
如不重合,则翻转力矩计算式为
T前向=(X期望ZMP-X实际ZMP)Z向广义力 (2-2)
T侧向=(Y期望ZMP-Y实际ZMP)Z向广义力 (2-3)
T旋转=(X期望ZMP-X实际ZMP)Y向广义力+
(Y期望ZMP-Y实际ZMP)X向广义力 (2-4)(https://www.daowen.com)
式中 T前向、T侧向、T旋转——作用在机器人上的前向力矩、侧向力矩和旋转力矩;
X期望ZMP、Y期望ZMP——期望ZMP点的坐标;
X实际ZMP、Y实际ZMP——实际ZMP点的坐标。
根据ZMP原理得到的结论:
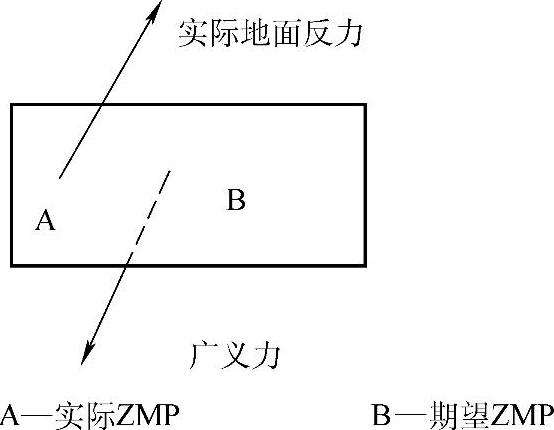
图2-2 机器人脚底的实际ZMP点和期望ZMP点的分布示意图
1)通过改变脚的姿态,改变实际ZMP的位置;
2)通过改变惯性力的大小(速度和姿态),改变期望ZMP的位置。
以ZMP作为双足步行机器人动态行走的稳定判据,建立了基于六维力/力矩传感器的实际ZMP检测系统,使双足步行机器人能够实现ZMP的闭环控制。
ZMP本是针对双足步行提出的,但一些研究人员将其应用到双足跑步领域。Kajita将机器人简化为一个无质量弹簧腿的倒立摆,在单腿支撑期遵守ZMP准则,在腾空期根据弹道模型得到飞行轨迹。国内有人将跑步稳定性分为支撑阶段和腾空阶段,在支撑阶段限制机器人足与地面完全接触,仍然遵守ZMP稳定准则。2003年,日本索尼公司发布了其跑步机器人QRIO的实验录像。2004年底,日本本田公司公布了ASIMO的跑步实验录像。基于商业机密的考虑,以上公司没有公布其技术细节,但从录像可以明显看出,这些机器人平脚板落地和平脚板腾空,仍然遵守ZMP平衡准则。实质上,ZMP的基本概念和判据是通过对约束的描述,确切地说是对机器人足与地面完全接触的约束,来间接反映静态和准动态步行的平衡性,由于没有从步行的本质去研究稳定性,并缩小了步行运动的范围,因而无法解释双足机器人行走时的动态运动。由于长期沿用ZMP稳定判据来研究双足步行机器人,各种相关研究一直没有从根本上突破其基本概念、定义及其理论模型,致使双足步行的基础理论严重滞后于拟人机器人样机技术的发展,并且已经成为进一步揭示人类复杂步行运动规律,提高样机步行性能,实现大步幅快速步行、动态跑步和跳跃等类人重要运动功能的瓶颈问题。
综上所述,近年来机器人领域的研究人员对双足步行机器人的稳定性与控制策略进行了大量的研究,取得了一系列的重要进展。但是在以下几个方面还需要更进一步研究:
(1)双足运动的动态稳定与控制机理 稳定性是仿人机器人的核心问题,目前基于ZMP的准动态理论不能满足双足机器人今后的发展需要,也无法解释自然界双足生物的复杂运动。因此迫切需要一套具有更广应用范围的、适合双足机器人的动态运动的稳定性理论体系。
(2)双足步行运动的固有鲁棒性机理 双足步行的鲁棒性问题是仅次于稳定性的另一个重要研究领域。双足生物对路面环境、自身的力学参数都具有很强的鲁棒性。而目前的双足机器人的步行运动对环境和自身的力学参数依赖性很大,因此给出这种鲁棒性的数学意义上的内蕴解释和严格证明就显得十分重要。
(3)实时步态规划与控制 目前双足机器人步态规划的研究主要集中在离线的产生,这种规划模式在一定程度上限制了步行的灵活性。因此需要采用在线步态合成方法解决双足机器人对不同环境的适应性问题。计算机技术的发展在一定程度上解决了计算速度的瓶颈问题,因而实时步态规划与基于传感器的大闭环反馈控制是未来的研究方向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




