与国外相比,我国从20世纪80年代中期才开始研究拟人机器人。在“七五”期间,国防科技大学和哈尔滨工业大学等单位分别进行了研究。在“863”项目支持下,国内的机器人研究有了长足的发展。
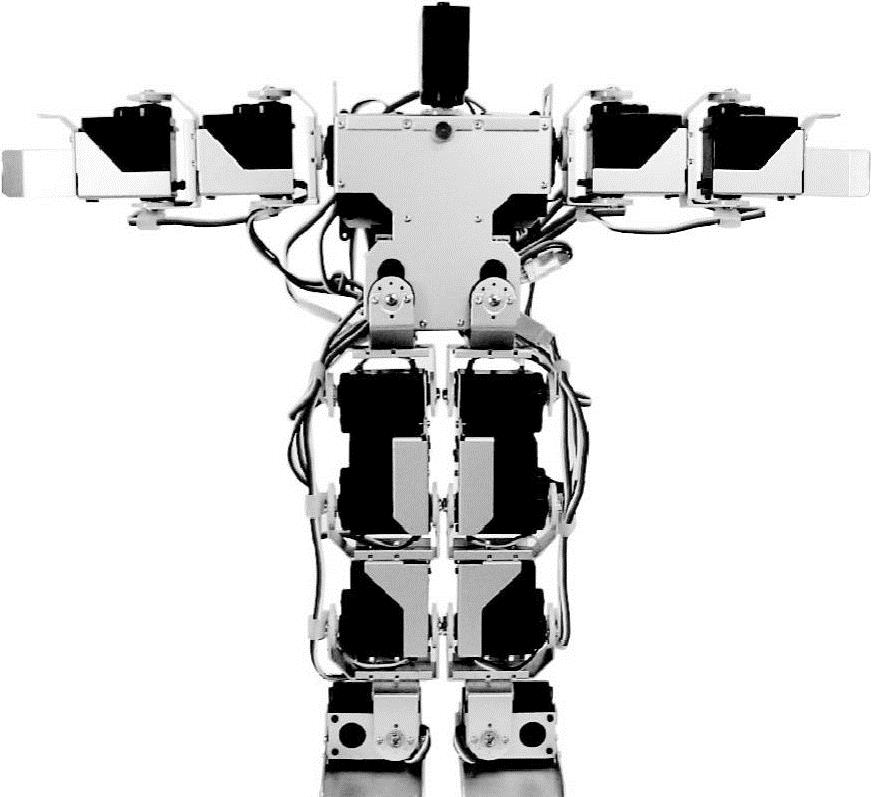
图1-20 小型双足机器人
(1)北京科技大学机器人 北京科技大学在研究机器人方面取得了巨大的成绩,2005年北京科技大学研制了双足步行机器人,如图1-20所示。它是具有17个自由度的,并可在平面上做各种拟人动作的双足步行机器人,采用了智能技术,通过无线传输,可使多个机器人同时进行表演,可以模拟人类的前进、后退、转弯、下蹲、侧翻、打太极拳、体操表演、直立前行行走、前滚翻、后滚翻、做俯卧撑、伏地起身、上下楼梯。
2006年,北京科技大学独立研制了具有人类外观特征的大型机器人乐乐(见图1-21),他具有人脸识别、语音识别、动作表演、生活常识、背诗、聊天、旅游常识、唱歌、生活常识、脑筋急转弯等多种功能。随后北京科技大学又研制出了大型机器人娜娜(见图1-22),并参加了天津科技馆的展出,娜娜高度和人的身高相仿,能模仿人的各种基本动作,同时具备语音识别与语音合成功能,可实现预定内容的人机交互;主机器人可以和客人进行日常用语对话,进行场馆的内容介绍,可以实现不同声调的变换,如男声、女声、卡通声音等。
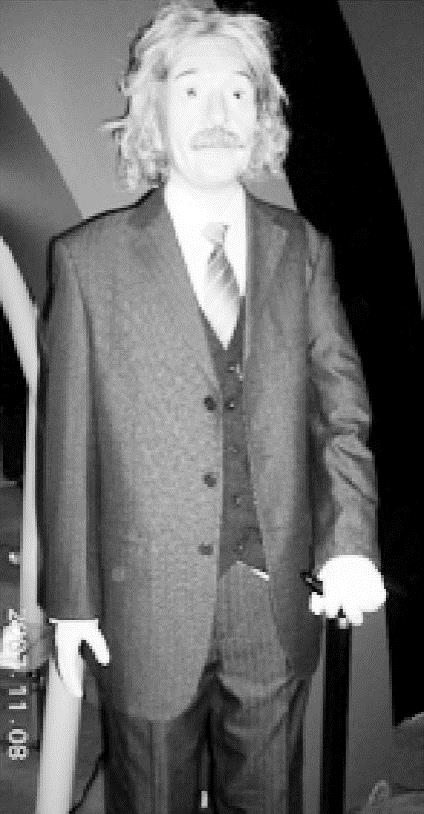
北京科技大学于2007年初在重庆展出了又一拟人机器人爱因斯坦(见图1-23),具有语音对话能力,男声,具备数据库更新能力,可以随时更新内容;能模仿人的各种基本动作,如摆头、点头、嘴的张合、眨眼、两臂前摆、外摆、大臂前摆、小臂伸曲、转腕、摆手等动作,还可与展区的其他机器人配合进行互动表演。
2007年12月,北京科技大学在大庆科技馆展示了由大型机器人科大一号(见图1-24)和双足步行机器人(见图1-20)组成的机器人团体表演,科大一号可以通过传感器网络感知环境,有方向感,可实现一定范围内的机器人全方位自主运动,机器人的作业臂可以灵活地运动。除此之外,它还可以进行跳舞、唱歌、背唐诗等表演,脸部采用动画显示表情,可以作出多种表情;通过多媒体计算机还可进行查询及场景解说。双足步行机器人主要是通过控制舵机来模仿人的身体结构和关节运动,可以在平面上做各种拟人动作,采用了智能技术,通过无线传输,可以多个小型机器人同时进行表演,可以实现人的行走、做俯卧撑、鞠躬、踢球等多种动作的模仿。

图1-21 乐乐
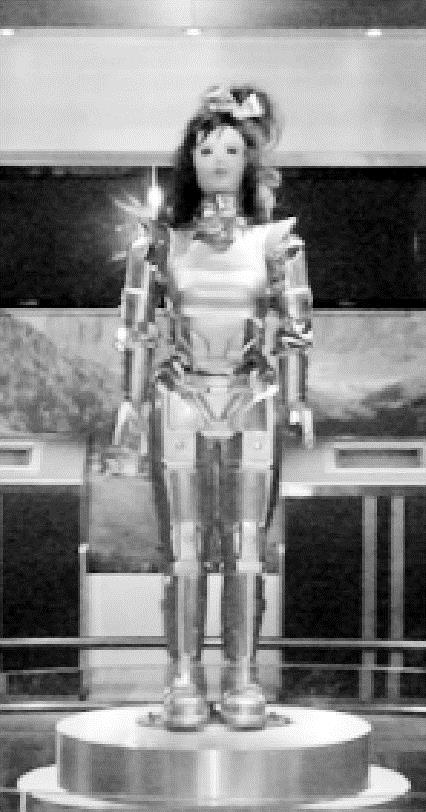
图1-22 娜娜
 (www.daowen.com)
(www.daowen.com)
图1-23 爱因斯坦

图1-24 科大一号
(2)哈尔滨工业大学机器人 哈尔滨工业大学是较早研制双足步行机器人的高校,它开始于1985年,早期的机器人没有头部和双臂,到1995年研制成功了HITⅠ、HITⅡ和HITⅢ[10]三个型号。1995年研制成功的HIT机器人的双腿具有12个自由度,踝关节由两个正交电动机构成,同时实现两个自由度。2004年6月,哈尔滨工业大学研制成功能用脚踢球的双足拟人足球机器人。
(3)国防科技大学机器人[11] 2000年,在国防科技大学诞生了我国独立研制的第一台具有人类外观特征、可以模拟人类行走与基本操作功能的“先行者”平面拟人机器人。“先行者”高为114m、重为20kg,具有人一样的身躯、脖子、头部、眼睛、双臂与双足,并具备了一定的语言功能。目前国防科技大学研制的新型拟人机器人有36个自由度,其中每条腿各6个,每个胳膊各6个,手部5个,头部2个,下肢各个关节有位置传感器,足部有多维力力矩传感器;整个控制系统、电源集成在机器人本体上。采用一种以DSP为核心、CAN总线为通信标准的新型控制结构进行控制。

图1-25 “汇童”双足机器人
(4)北京理工大学机器人 我国第一个真正意义上的BHR-1拟人机器人在2002年12月通过了国家863项目组的验收。该机器人按照亚洲人的标准,身高为1158mm,体重为76kg。它全身有32个关节,使其活动起来比较自如,步幅为0.133m,速度为1km/h。机器人手、脚可以完成360°的旋转,比人更灵活。除了行走,它还能蹲下、站起、原地踏步、打太极拳。这个机器人还会腾空行走,并能根据自身的平衡状态和地面高度变化,实现未知路面的稳定行走。在系统集成、步态规划和控制系统等方面实现了重大的突破。目前BRH-1已经研制到第3代“汇童”,高度为116cm,重量为63kg,突破了仿人机器人的复杂动作设计,在国际上首次实现了模仿太极拳、刀术等人类复杂动作。2005年9月18日,由北京理工大学牵头、中科院沈阳自动化所、兵器工业集团惠丰机械有限公司、航天工业集团红林机械厂、中科院北京自动化所等单位参加,通过3年的奋斗,研制的“汇童”拟人机器人,如图1-25所示。该拟人机器人是科技部“十五”863计划先进制造与自动化领域机器人技术主题的重点项目,同时得到了国防科工委国防预研专项、国防基础科研重点专项、北京理工大学985工程科技创新专项等大力扶持。“汇童”身高为1.60m,体重为63kg,全身共有32个自由度,配备力传感器、视觉传感器、加速度计、倾角计、编码器等各类传感器共44个,可模仿人类前进、后退、侧行、转弯、上下台阶、太极拳、刀术等各种复杂动作。“汇童”是具有视觉、语音对话、力觉、平衡觉等功能的自主知识产权的拟人机器人,功能达到了国际先进水平,它的成功研制标志着我国成为少数掌握集机构、控制、传感器、电源于一体的高度集成技术的国家。
(5)清华大学机器人 清华大学设计的THBIP机器人,本体结构类人,共设置32个自由度,头部2个,上肢12个,下肢12个,手部6个。躯干部装有陀螺姿态传感器,脚底和手腕装有六维力传感器;各关节装有位置传感器。机器人采用模糊非线性控制,成功实现了无缆连续稳定的平地前进、后退、侧行、连续上下台阶行走,以及端水、太极拳和点头等动作。
除以上单位外,上海交通大学等单位也在进行相关研究[6]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





