(1)麻省理工学院机器人 1999年美国麻省理工学院研制出了COG拟人机器人,由头、躯干、胳膊及双手组成。它是人和人工智能等领域的一个平台。2005年麻省理工学院研制出具有29个自由度的Domo机器人。同年该学院还研发出双足学习机器人,采用“被动动力学(Passive Dynamic)”理论设计,部分关节没有电动机和控制器,却能实现非常类人的运动。
麻省理工大学研制的Kismet机器人,如图1-15所示。

图1-15 Kismet机器人
Kismet总共有21个自由度,如图1-16所示。3个自由度控制眼球注视的方向,3个控制头部的方向,其余15个控制面部表情(眼睑、眉、嘴唇和耳朵)。Kismet的眼部有4个CCD照相机、2个传声器。
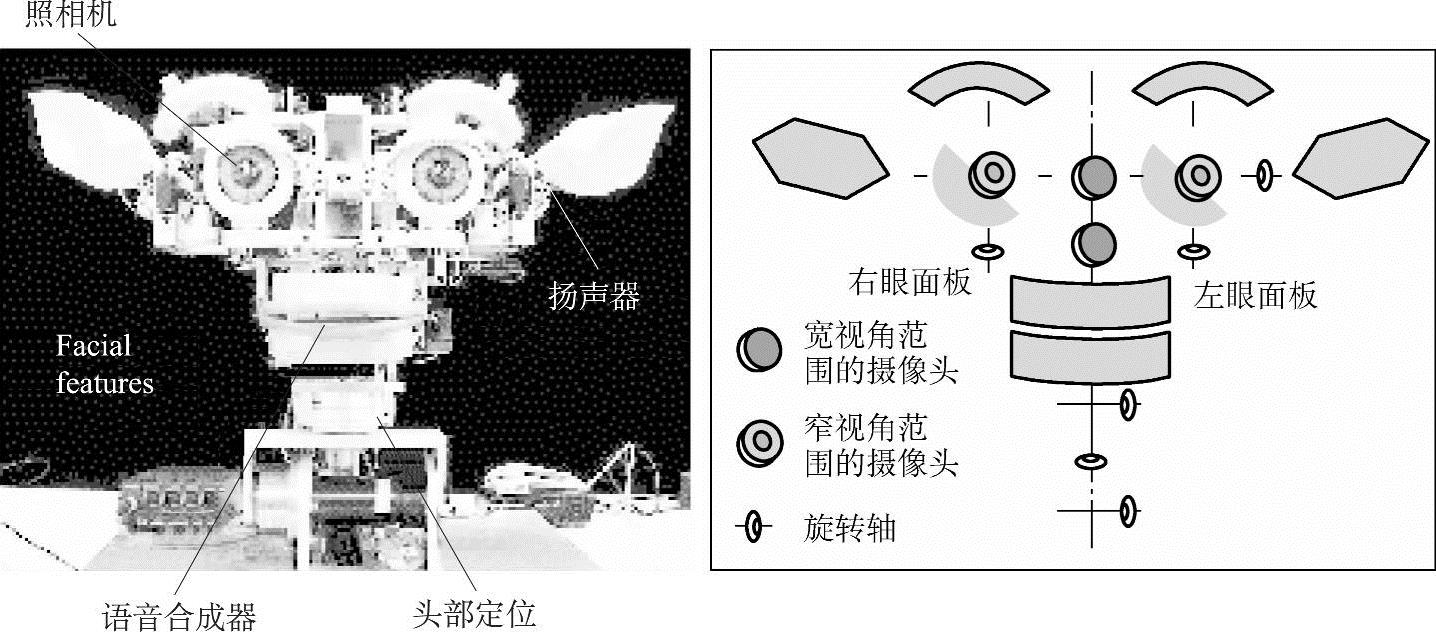
图1-16 Kismet机器人组成
其功能有:视觉跟踪,采用图像处理技术,跟踪物体;面部可以呈现一些表情,主要的面部表情运动有眉毛和嘴;可以讲话,通过语音识别和人工智能技术,实现与人进行简单的语音交互功能;表达情感,这个功能是Kismet一个非常突出的功能,根据人的表情、环境等表达自己的情绪,例如高兴、惊讶、沮丧等。图1-17所示是Kismet机器人情感表达空间,表示了Kismet机器人的情绪分布情况。根据机器人的情感可以表达出来机器人情绪状态,意味着机器人将不再是一个冰冷的金属装置,它们也慢慢地具有了类似人的情绪,表达类似人的情感。这是机器人研究的一个重大进步。
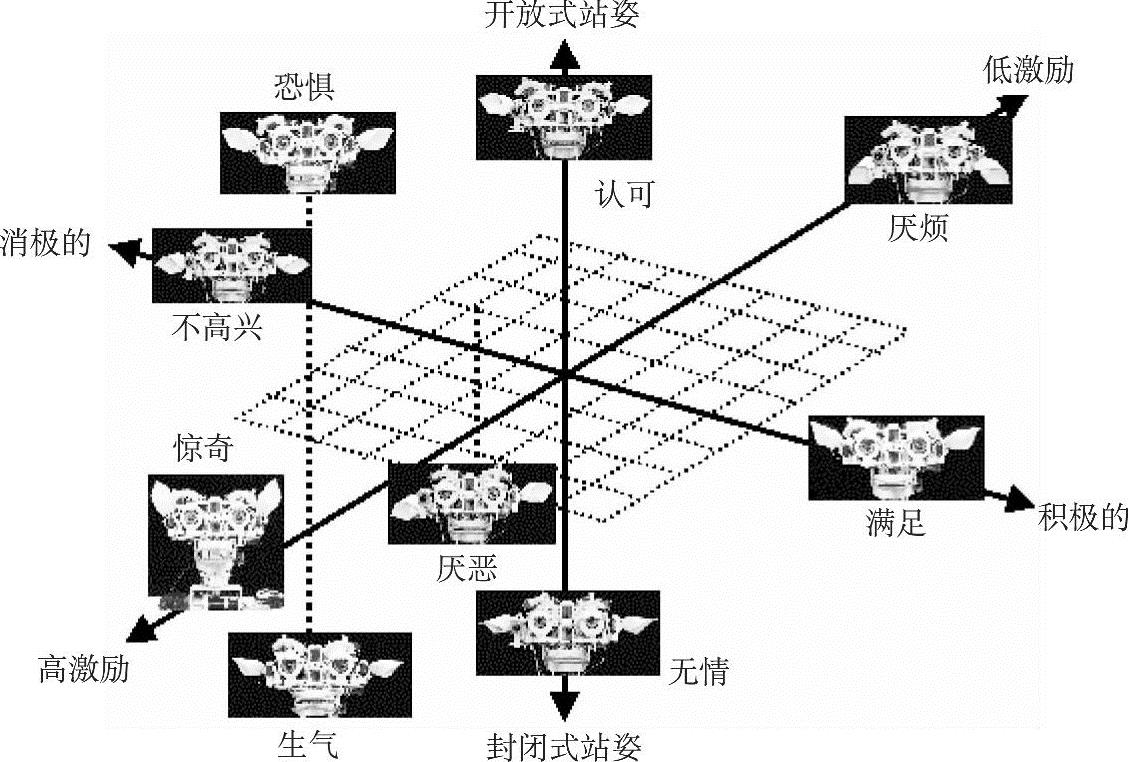
图1-17 Kismet机器人的情感表达空间(www.daowen.com)
Kismet不光具有上述一些功能,还具有学习能力,通过人的不断训练,它可以通过学习不断地完善自己的表达,可以看出来,Kismet机器人是一个聪明的家伙,虽然他没有强健的身体,但是它的大脑开始不断地强大起来。
(2)Rabbit机器人 法国格勒诺布尔自动化实验室的Rabbit是世界上第四个可以跑动的双足步行机器人,Rabbit拥有较简单的机械结构,它没有脚,只有一对“脚踝”,即一对枢轴,这样的设计使得Rabbit在向前迈步时,整条腿能够绕着枢轴转动,如图1-18所示。其原型高1.425m,重36kg。Rabbit是按照机械结构最简单来运动的。
图1-18 法国格勒诺布尔自动化实验室的Rabbit机器人
此外,2004年NASA科学家Dr.Mark W.Tilden依照(生物学、电子学、美学、机械学)(Biology,Electronics,Aesthetics and Mechanics,BEAM)四大原理与技术设计开发出Robo Sapi En双足娱乐型机器人。
德国慕尼黑技术大学的Johnnie,开发了具有17个自由度,身高为1.8m,重量为40kg(不带电源),其中上肢有2个自由度,在行走时摆动来补偿重力矩变化。其关节由直流电动机加齿轮传动机构来驱动,关节转角和速度由增量码盘测量。采用了数字传感器以最小化数字扰动,足部装有六维力传感器。主机采用P42.8GHz处理器,利用PCI总线实现与传感器和驱动器间的数据传输。整个控制算法运行于RT-Linux实时操作系统。其行走时速为2.2km/h,它是2003年当时世界上行走速度最快的双足步行机器人,也是世界上最高的双足步行机器人,能实现平稳行走,进行图像识别和自主避障功能。
2005年2月21日召开的第171届美国科学促进会的年会上,由美国康奈尔大学、麻省理工学院和荷兰代尔夫特理工大学的科学家分别组成的研究小组,展示了他们研制出的能以人类步态直立行走的被动动力行走机器人,被认为代表了当前被动动力机器人研究的最新成果,如图1-19所示。
图1-19 WABLAN-4机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







