
提到拟人机器人,我们就不得不提到日本的索尼公司,该公司在拟人机器人方面做出的贡献是有目共睹的,从最初的AIBO到SDR-4X、SDR-4XII再到QRIO,无不表现出非凡的创意。
索尼公司的工业机器人产业始于1980年,1997年启动拟人步行机器人研究计划,样机取名SDR(Sony Dream Robot,索尼梦幻机器人),以梦幻般的演技为目标。起步虽晚,但索尼公司能利用后发优势,注意吸取前人的经验,特别是早稻田大学的成果。索尼AIBO智能玩具狗享誉世界,是四足智能机器人的杰作。索尼拟人双足步行机器人的构思与AIBO一脉相承,即供娱乐表演的商品,也显示出后来居上的势头。
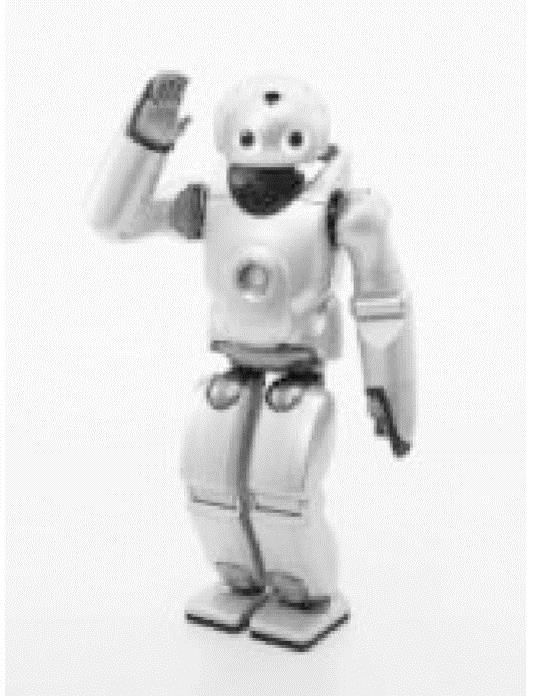
图1-8 SDR-4X双足娱乐机器人
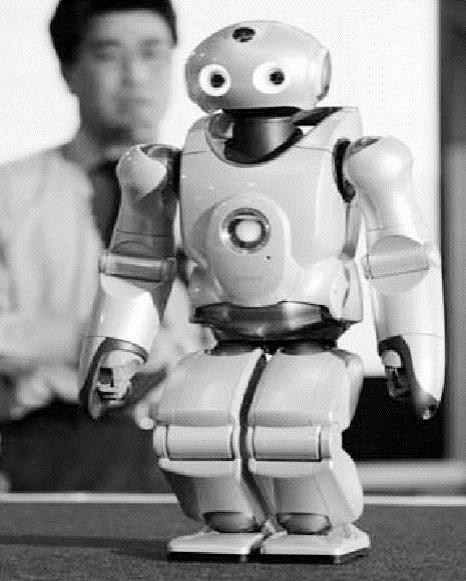
图1-9 双足行走机器人SDR-4XII
2002年推出的SDR-4X新型机器人强化了人机对话功能,提高通信能力,并且在运动性能方面做了改进,以缓和摔倒时的冲击力,如图1-8所示。
SDR-4X具有以下特点:
(1)尺度小巧、体态轻盈 出于玩具化、商品化的初衷,SDR-4X(见图1-8)的外形尺寸(高×宽×厚)仅为50cm×22cm×14cm,这带来诸多优点,如安全、节省能源、便于携带等,然而也伴有若干问题,如倾倒过程加快,控制响应时间更短等。索尼公司创新研究所长土井利忠认为,下一代产品的目标是身高为30~40cm,自重为2~3kg。
(2)全身协调运动控制 与ASIMO相反,SDR-4X主要靠上身表演动作,下身仅仅适从跟随。由于在腰关节特设了两个自由度,因此她能表演展臂、劈叉、踢球、倾倒后自站立、优美舞姿等。
(3)伺服电动机的机械-电气-驱动-控制的一体化 SDR-4X安装ISA系列的3种体积小、重量轻、精度高、内藏减速器和专用集成电路(ASIC)驱动控制电路板的专用AC伺服电动机,真正实现了电动机集成技术。该系列自制电动机的重量仅是同类传统电动机的1/4~1/5。
(4)智能化 SDR-4X与AIBO机器狗采用相同的OPEN-R系统软件。不同的是需要进一步开发借助身段、手势、声音等在一定程度上与人交流的功能,以接近人类的丰富表达力。其中视觉和听觉不可或缺,而语音能力尤为期待和困难。(www.daowen.com)
2003年3月24日索尼公司发布了新一代机器人模型——SDR-4XII,如图1-9所示,它是SDR-4X的升级产品,可以在失去平衡时自动校正,或者对旋转方向或者对前后左右作调整。跌倒时,它还可以自己站起来,重新恢复正常状态。另外,SDR-4XII还可以识别位置,通过内存的地图自行到达目的地。对于颜色它也能很好地识别,能够根据颜色判断地点。在语言方面,SDR-4XII增加了语音辨别、合成用CPU,可以实现更精准的语言连续识别。在记忆上,它能记住更多的对话。
2003年12月11日在日本东京“索尼科学探索”的媒体预展会上,索尼公司又推出了索尼QRIO——世界首台会跑的双足步行机器人,如图1-10所示。索尼定义的“跑”的概念是指机器人行走时双足处于离开地面的非接触状态(Loss of Contact),并不是那种一定要某只脚接触地面像竞走那样的“快步走”。据索尼公司介绍,此前世界上没有可以在不接触地面的状态下行走的机器人。此次开发的双足行走机器人在行走时可以约有20ms的不接触地面的时间。该机器人不仅可以行走,而且可以跳跃,在跳跃状态下不接触地面的时间可达40ms。行走速度为14m/min。如果假设其大小与人相同,换算过来相当于时速0.84km/h,给人以缓缓慢跑的印象。
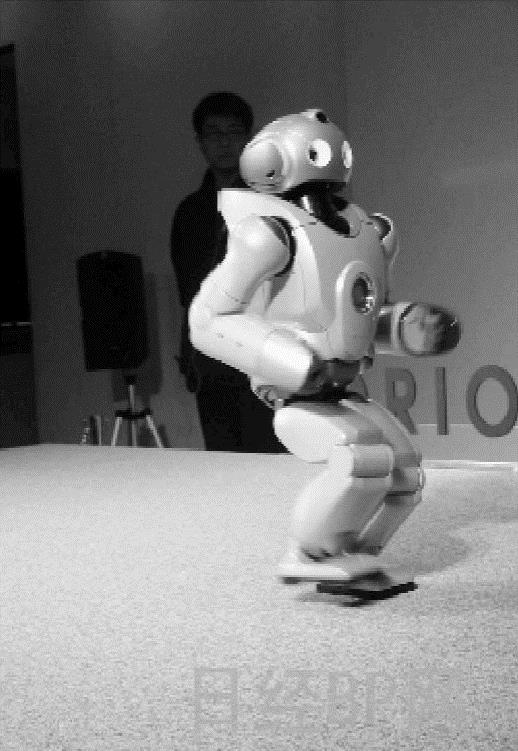
图1-10 跑步中的索尼新型QRIO
索尼公司的QRIO是世界上首个会跑的人形机器人。为防止机体的关节部分挂住用户的衣服、手指等,还特意在关节部位采用了圆弧设计。QRIO有着良好四肢协调性能。之后,索尼公司在这个基础上强化了人机对话功能、提高通信能力,进一步在运动性能方面做了改进,以缓和摔倒时的冲击力,于是“QRIO”诞生了。这个机器人可以漫步、跳舞,并可做很多高难度动作,它甚至可以指挥一个小型乐队。
“QRIO”的运动性能与通信能力方面都增加了新功能。如强化了双足行走功能、跌倒后自己站起来的功能、识别用户的功能等。追加的这些功能均是针对普通用户设计的。为实现上述功能,QRIO上内置的两个微处理器分别作为运动中枢和思维中枢,分管运动功能与思维功能。这些性能的设计,很大程度上以在普通家庭中的共同生活为目标,即便行走路面凹凸不平,或者有台阶或斜坡,也能照常行走。
此外,索尼公司都将机器人与音频相结合的表演作为机器人展示中的重要部分,如QRIO的太极拳表演,用节奏不强的音乐和动作配合太极拳、千手观音等节奏性不强的动作,以此来弱化节奏在音乐表演中的作用,这种表演方式尤其适合中国传统民乐和古曲的音乐的动作表演,如图1-11和图1-12所示。
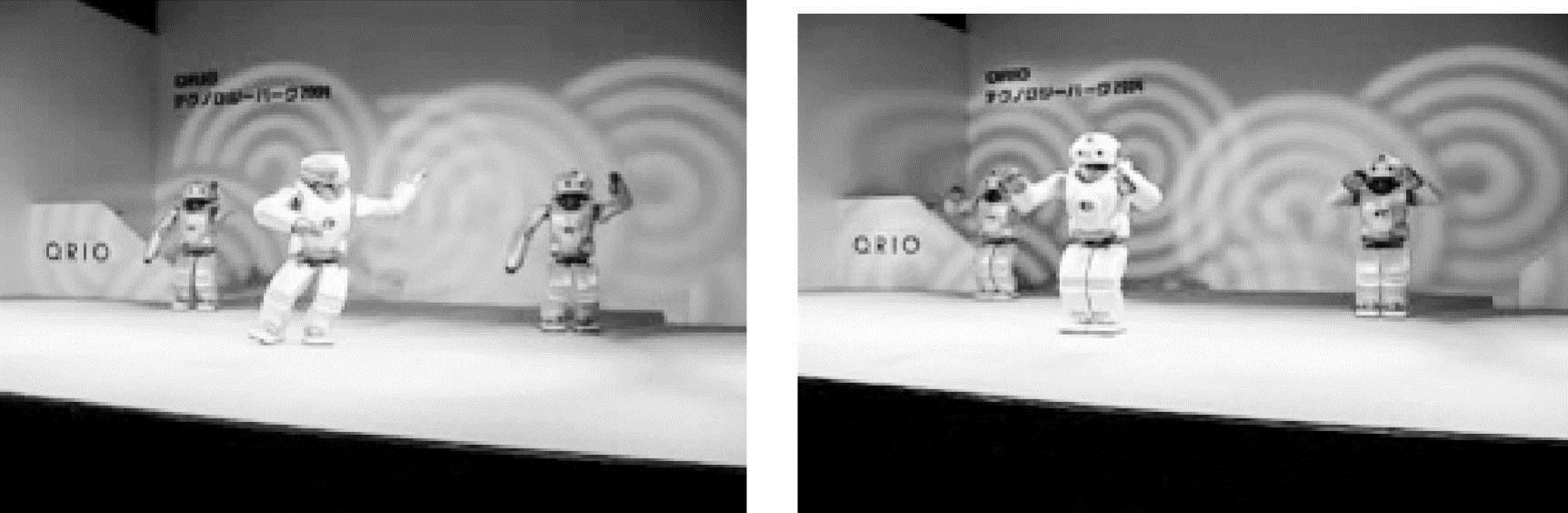
图1-11 QRIO随音乐进行的太极拳表演
图1-12 QRIO随音乐进行的铃铛表演
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






