日本本田公司的仿人机器人工程开始于1986年。1986年本田的ASIMO机器人实现了可以两条腿行走,成功地实现了双腿的交替移动。但是,每一步几乎要用5s的时间,它只能沿着直线以很慢的速度行走。第一个完全独立,依靠两条腿行走的拟人机器人诞生于1997年9月,身高:1600mm体重:130kg。通过改换部件材料,以及将控制系统分散布置,降低了身高,减轻了体重。较小的尺寸更适宜在人们的生活环境中使用。经过10年的秘密研究,P2机器人[8,9]在1996年一经问世,便令世人瞠目。P2机器人是世界上第一个无缆拟人机器人,它能走,能上下台阶,能推小车。P3是P2的改进,减小了尺寸(重量由原来的210kg降为130kg,高度由1800mm降为1600mm,提高了步行能力。2002年12月本田公司又推出了新型双足步行机器人阿西莫ASIMO,如图1-6所示。和“P3”相比,它的体形更小、重量更轻,并采用了新开发的智能实时灵活步行“I-Walkinga(Intelligent Realtime Flexible Walking)技术”实现更加自由的步行。本田公司这个最新款的ASIMO智能拟人机器人主要有以下几个特点:①基于认知技术的先进的交流能力。它能实现移动物体认知、位置/姿态认知、环境认知、声音认知和面部认知。②网络集成能力,它能与用户网络系统相连完成用户指令,还能通过互联网为主人的问题寻找答案。
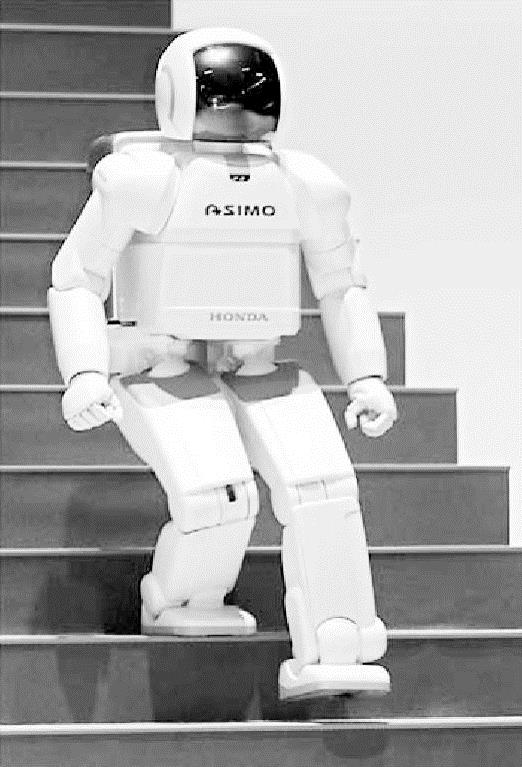
图1-6 ASIMO拟人机器人
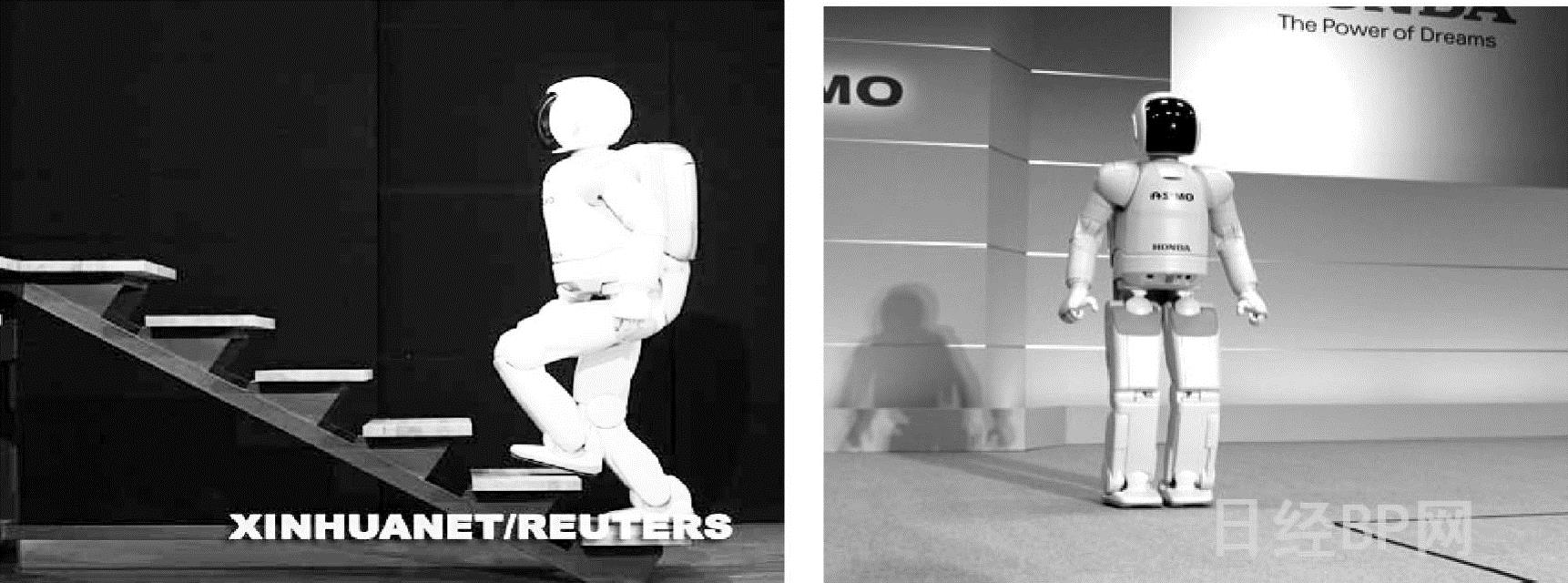
2004年12月15日本田公开了新一代ASIMO双足行走机器人,提高了移动性能,其目标是可在实际环境中快速判断情况、敏捷行动。通过利用上半身弯曲及扭曲的新姿态控制理论,以及新开发的高速响应硬件,加上可与慢跑媲美的动作,实现了时速3km行走,正常行走时速为2.5km/h,能实现跑动时速为6km/h。其高度为1.3m,总重为54kg,具有34个自由度,其中下肢12个自由度,如图1-7所示。它采用与人一样自然行走的新姿态控制技术、自律连续移动技术,以及可顺畅地与人同步动作的技术等。
 (https://www.daowen.com)
(https://www.daowen.com)
图1-7 新一代“ASIMO”双足行走机器人
在连续移动方面,它通过由地面传感器获得的周围信息,以及在步行的同时对照事先存入的地图信息,可对路线错误进行修正;当检测到有障碍物时,可凭借自己的判断而绕开;同时,通过头部的视觉传感器及新追加的手腕力觉传感器等,可检测人的动作、接拿物品,以及按照对方的动作节奏握手;可以做出将脚迈向手部被推拉的方向等与人动作同步的动作。
2007年9月27日,本田公司主导开发的新版ASIMO机器人在西班牙巴塞罗那亮相。经过7年研发的新版ASIMO机器人身高为1.2m,体重为43kg,由移动电话控制,能有以酷似人类的姿势活动,与以前版本的机器人相比,加强了与人类交流的能力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





