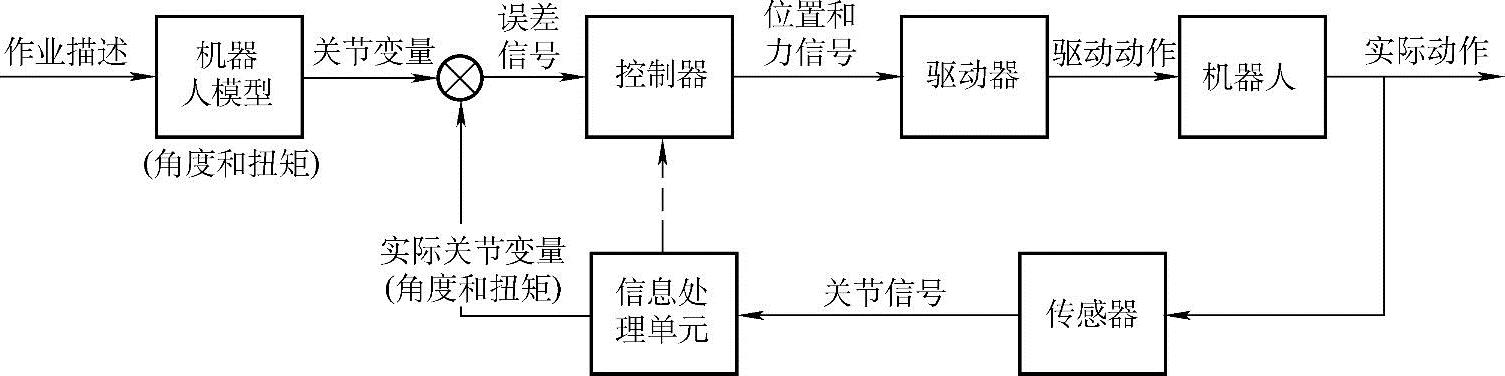
机械系统是由机械元素组成的,它可以是自然的,也可以是人造的。后者是我们要研究的对象。机器人的机械系统由以下几个子系统组成:①机械子系统,由刚体和弹性体组成;②传感系统;③执行系统;④控制器;⑤信息处理。此外,子系统之间的通信是通过接口进行的,接口的基本功能是把从一个部分传到另一个部分的信息解码。图1-4是典型机械系统的框图,系统的输入是事先确定的任务,它是由实时或离线给定的。前者在本质上看成是智能的,后者是可编程序的机械。机器人的机械系统输出是通过传感器监测的实际任务(Ac-tual Task)。传感器以反馈信号的形式传递作业信息并与事先设定的动作相比较,事先设定的任务与执行动作间的误差反馈给控制器,然后合成必要的校正信号。在机器人控制系统中,通过人来构成闭环控制的称为遥控机器人(Telemanipulator)。遥控机器人是人借助于复杂的传感器和显示装置进行控制的机械系统,操作者也就成了图1-4所示框图中的一个中心单元,根据显示的信息,操作者对校正信号调整,以完成所需要完成的动作。
我们必须明确,研究机器人机械系统,需要建立起一套运动的表示方法。我们用独立的杆件运动组合成机械系统,把这些杆件看成刚体。一般刚体的运动由平动和转动组成,通过一个坐标系和矢量代数计算距离和角度,并在此坐标系下描述矢量,但最终的结果与我们所选择的坐标系无关。最终得到的数学模型就是我们要找的机械系统运动的表示方法。这些数学表示方法一般包括:线性变换、刚体的旋转矩阵、坐标变换和齐次坐标建立、校正方法及各种方法的合成等。以上各种方法的具体概念及实现方法请参见相关文献。
 (https://www.daowen.com)
(https://www.daowen.com)
图1-4 机器人机械系统框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





