机器人的历史源远流长,早在我国的西周时期,一名叫做偃师的能工巧匠就造就了一个能歌善舞的伶人,这是有据可查的第一个“机器人”。在1800年前的汉朝,张衡造出了举世闻名的地动仪和计里鼓车。在三国时期的诸葛亮发明了木牛流马,用来运送粮草。在国外,公元前2世纪亚历山大时期,古希腊人造就出了“自动机”——以空气、水、蒸汽压力为动力的会动的雕像。这些都可以看做是广义上的机器人。
美国的德沃尔(George G.Devol)设想了一种可控制的机械手,他首先突破了对机器人的传统观点,提出机器人并不一定必须像人,但是必须能做一些人的工作。1954年,他依据这一想法设计制作了世界上第一台机器人实验装置,发表了《适用于重复作业的通用性工业机器人》一文,并获得了美国专利。
德沃尔将遥控操纵器的关节型连杆机构与数控机床的伺服轴连接在一起,预定的机械手动作一经编程输入后,机械等就可以离开人的辅助而独立运行。这种机器人也可以接受示教而完成各种简单任务。
1959年,英格伯格和德沃尔联手制造出第一台工业机器人。由英格伯格负责设计机器人的“手”“脚”“身体”,即机器人的机械部分和完成操作部分;由德沃尔设计机器人的“头脑”“神经系统”“肌肉系统”,即机器人的控制装置和驱动装置。它成为世界上第一台真正的实用工业机器人。
英格伯格在大学攻读伺服理论,这是一种研究运动机构如何才能更好地跟踪控制信号的理论。德沃尔曾于1946年发明了一种系统,可以“重演”所记录的机器的运动。1954年,德沃尔又获得可编程机械手专利,这种机械手臂按程序进行工作,可以根据不同的工作需要编制不同的程序,因此具有通用性和灵活性,英格伯格和德沃尔都在研究机器人,他们认为汽车工业最适于用机器人干活,因为汽车工业是用重型机器进行工作的,生产过程较为固定。
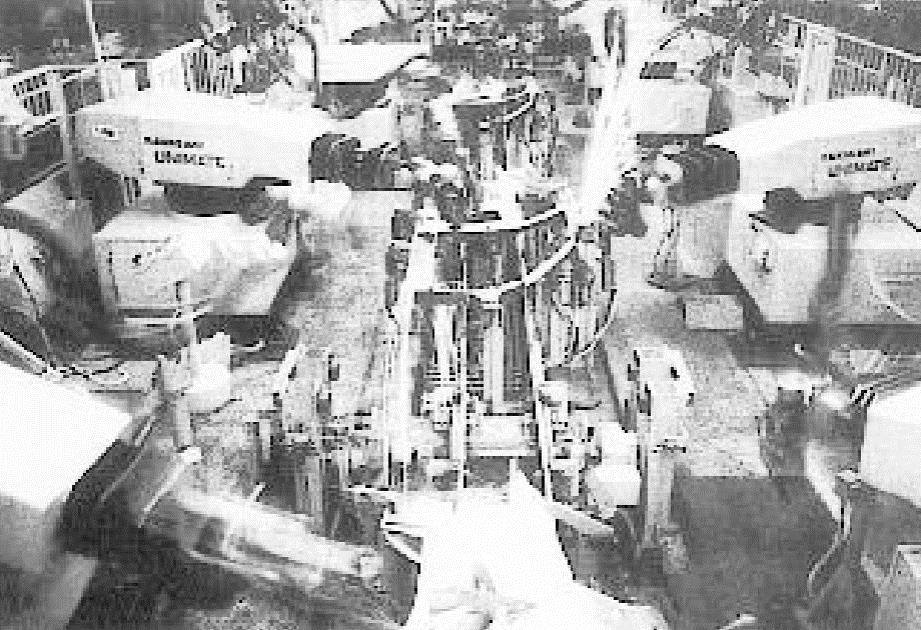
这种机器人外形有点像坦克炮塔,基座上有一个大机械臂,大臂可绕轴在基座上转动,大臂上又伸出一个小机械臂,它相对大臂可以伸出或缩回。小臂顶有一个腕子,可绕小臂转动,进行俯仰和侧摇。腕子前头是手,即操作器。这个机器人的功能和人手臂功能相似,如图1-1所示。
这是世界上第一台真正的实用工业机器人。此后英格伯格和德沃尔成立了“Unimation”公司,兴办了世界上第一家机器人制造工厂。第一批工业机器人被称为“尤尼梅特(UNI-MATE)”,意思是“万能自动”。他们因此被称为机器人之父。1962年美国机械与铸造公司也制造出工业机器人,称为“沃尔萨特兰(VERSTRAN)”,意思是“万能搬动”。“尤尼梅特”和“沃尔萨特兰”就成为世界上最早的、至今仍在使用的工业机器人。
 (www.daowen.com)
(www.daowen.com)
图1-1 世界上第一台工业机器人“尤尼梅特”正在生产线上工作
英格伯格和德沃尔制造的工业机器人是第一代机器人,属于示教再现型,即人手把着机械手,把应当完成的任务做一遍,或者人用“示教控制盒”发出指令,让机器人的机械手臂运动,一步步完成它应当完成的各个动作。
1967年日本川崎重工公司从美国购买了机器人的生产许可证,日本从此开始了对机器人制造和开发的热潮。
20世纪80年代,计算机技术推动机器人技术的发展达到了新的水平。上到宇宙飞船,下至海洋开发都采用了机器人作业。机器人技术已成为高科技应用领域中的重要组成部分。
第二代是有感觉的机器人,它们对外界环境有一定感知能力,并具有听觉、视觉、触觉等功能。机器人工作时,根据感觉器官(传感器)获得的信息,灵活调整自己的工作状态,保证在适应环境的情况下完成工作。如:有触觉的机械手可轻松自如地抓取鸡蛋,具有嗅觉的机器人能分辨出不同饮料和酒类。
第三代机器人是智能机器人,它不仅具有感觉能力,而且还具有独立判断和行动的能力,并具有记忆、推理和决策的能力,因而能够完成更加复杂的动作。中央计算机控制手臂和行走装置,使机器人的手完成作业,脚完成移动,机器人能够用自然语言与人对话。智能机器人的“智能”特征就在于它具有与外部世界——对象、环境和人相适应、相协调的工作机能。从控制方式看,智能机器人不同于工业机器人的“示教、再现”,不同于遥控机器人的“主—从操纵”,而是以一种“认知—适应”的方式自律地进行操作。
智能机器人在发生故障时,通过自诊断装置能自诊断出故障部位,并能自修复。今天,智能机器人的应用范围大大地扩展了,除工农业生产外,机器人还应用到各行各业,机器人已具备了人类的特点。机器人向着智能化、拟人化方向发展的道路是没有止境的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







