链传动的运动特性是指链传动的运动不均匀性及动载荷。
(1)链传动的运动不均匀性 链传动的运动情况和绕在多边形轮子上的带传动相似,链条的平均速度 是常数,链传动的平均传动比
是常数,链传动的平均传动比 也是常数,式中z1、z2、n1、n2,分别为小轮、大轮的齿数、转速(r/min),p为链条齿距。
也是常数,式中z1、z2、n1、n2,分别为小轮、大轮的齿数、转速(r/min),p为链条齿距。
但是链是由钢性链节通过销轴铰接而成,当链条与链轮啮合时,链条呈一多边形分布在链轮上。由于这种多边形效应造成了链传动的运动的不均匀性,即链的瞬时链速和瞬时传动比都在变化。
1)链传动的瞬时速度。因为链是由钢性链节通过销轴铰接而成,当链条与链轮啮合时,链条便呈一多边形分布在链轮上,如图6-16所示。假设链的主动边在传动中总是处于水平位置,主动轮以等角速度ω1转动,则绕进链轮上的链条的铰链销轴中心的圆周速度v1=R1ω1。可得链条瞬间的水平速度为
v=v1cosβ=R1ω1cosβ
铰链中心的铅垂速度为
v'=v1sinβ=R1ω1sinβ
式中 每转一个链节,其值在±φ1/2间变化(φ1=360°/z1)。说明链传动
每个瞬时水平速度和垂直速度都在变化。
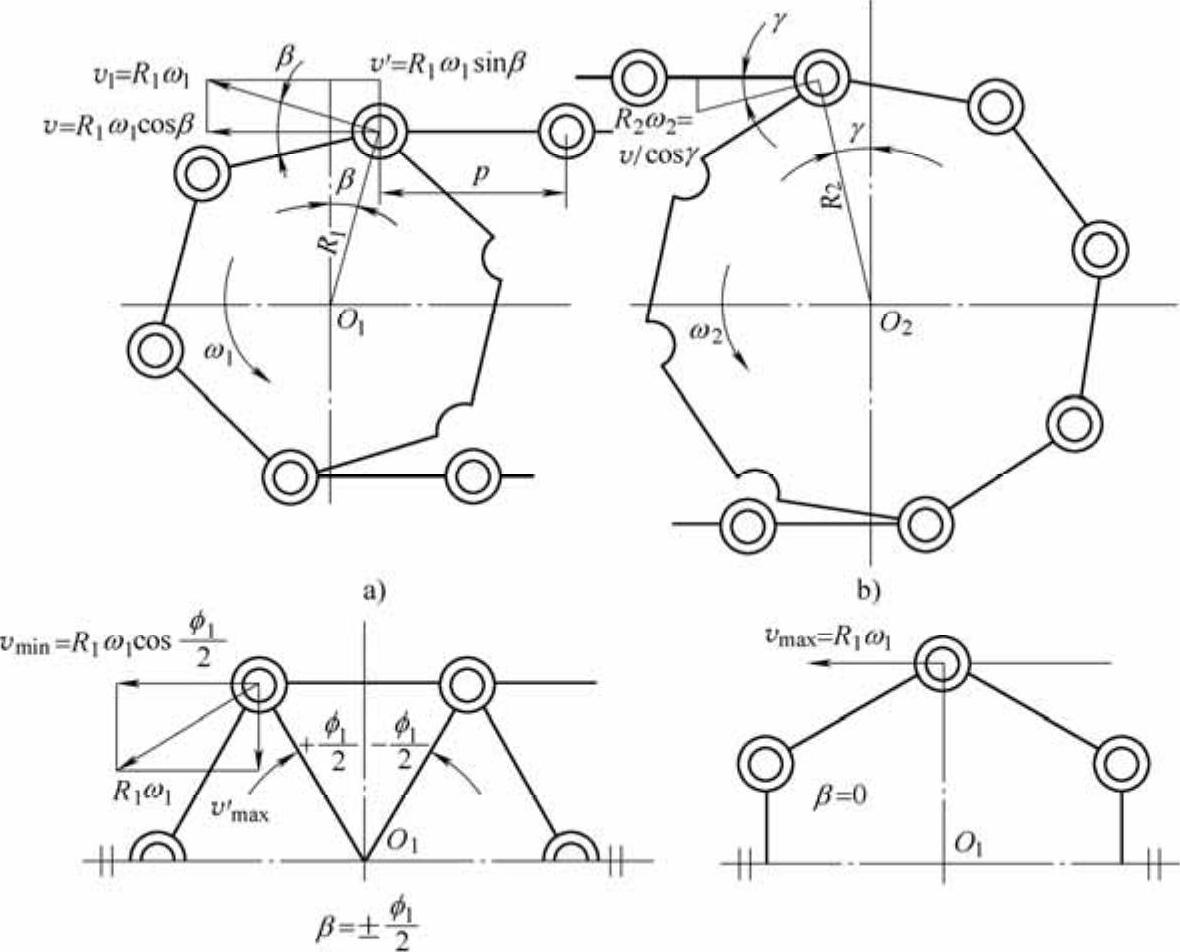
图6-16 链传动的运动分析
2)链传动的瞬时传动比
式中 β,γ——主动轮及从动轮上的相位角,即链条铰链中心速度v1与水平
线的夹角,链轮每转一链节,β值在±φ1/2(φ1=360°/z1)
间变化,γ值在±φ2/2(φ2=360°/z2)间变化;
R1,R2——小链轮、大链轮的分度圆半径。
因为每个瞬时β和γ都在变化,因此链传动的瞬时传动比也是变化的。
(2)链传动的动载荷
1)由链条水平速度v的变化产生的动载荷。因为Fd1=ma,可推导出由此产生的最大动载荷为
式中 a——链条水平加速度(m/s2);
m——链条紧边的质量(kg)。
2)由从动轮角速度ω2变化使从动轮系产生的动载荷为
式中 J——从动轮系转化到从动链轮上的转动惯量(kg·m2)。
3)链轮轮齿与链节啮合瞬间的相对速度vs也要产生冲击和动载荷。
综上所述,链条的运动是忽快忽慢忽上忽下,造成链速的不均匀性及附加动载荷。这种在链传动中,由于链呈多边形运动,链条瞬时速度和传动比发生周期性波动,链条上下振动造成的传动不平稳现象,是链传动固有的特性,是无法消除的,称为链传动的多边形效应。为了减少链传动运动的不均匀性和动载荷,通常应采用较小的链齿距和较多的链轮齿数,并限制链轮的极限转速。
2.链传动的受力分析
如果不考虑动载荷,链在传动中的主要作用力有:
(1)工作拉力F1(www.daowen.com)
式中 P——传递的功率(kW);
v——链速(m/s)。
(2)离心拉力Fc取决于每米链长的质量m和链速v(链速v>7m/s时,离心力不可忽略)。
Fc=qv2
式中 q——链条单位长的质量(kg/m)。
(3)垂度拉力Ff 取决于传动的布置方式及链在工作时允许的垂度。若允许垂度过小,则必须以很大的Ff力拉紧,从而增加链的磨损和轴承载荷;允许垂度过大,则又会使链和链轮的啮合情况变坏。可按照求悬索拉力的方法求得垂度拉力为
Ff=kfqga
式中 kf——垂度系数;
g——重力加速度(m/s2);
a——中心距(mm)。
对于水平传动,kf=6(允许f/a≈0.02,f为悬索垂度)。对于倾斜角(两链轮中心连线与水平面所成的角)小于40°的传动,可取kf=4;大于40°的传动,可取kf=2;垂直传动,可取kf=1。由此得链紧边拉力为
F=F1+Fc+Ff
松边拉力为
F′=Fc+Ff
(4)压轴力FQ可近似地取为紧边和松边总拉力之和。离心拉力对它没有影响,不应计算在内,由此得FQ=F1+2Ff,又由于垂度拉力不大,故近似取
FQ≈1.2f1F1
式中 f1——应用系数。
3.链传动的失效形式和额定功率
(1)链传动的失效形式
1)链的疲劳破坏。链在工作时受到变应力作用,经一定循环次数后,链板将会出现疲劳断裂,或者套筒、滚子表面将会出现疲劳点蚀,这是链传动在润滑良好、中等速度以下工作时首先出现的一种失效形式,也是决定链传动传动能力的主要因素,由链板疲劳强度限定的额定功率如图6-17中曲线1所示。
2)链的冲击破断。链在工作时,由于反复起动、制动、反转,尤其在高速时,由于多边形效应,而使滚子、套筒和销轴产生冲击疲劳破断。由滚子、套筒和销轴的冲击疲劳强度限定的额定功率如图6-17中曲线2所示。
3)链条铰链的胶合破坏。当链轮转速达到一定数值时,销轴与套筒的工作表面,由于链节啮入时受到的冲击能量增大或摩擦产生的温度过高,造成销轴与套筒工作表面润滑油膜破裂而导致胶合破坏。胶合在一定程度上限制了链传动的极限转速。胶合限定的工作能力如图6-17中曲线3所示。
4)链条铰链的磨损。当链条在润滑条件恶劣的情况下工作,铰链的销轴和套筒既承受压力又要产生相对转动,必然引起磨损,使齿距p增大,从而引起跳齿、脱链及其他破坏。当按推荐方式润滑时,磨损大大降低,这种失效得以避免。
5)链条的静力拉断。在低速(v<0.6m/s)重载或瞬间尖峰载荷过大时,链条所受拉力超过了链条的静强度时,链条将被拉断。
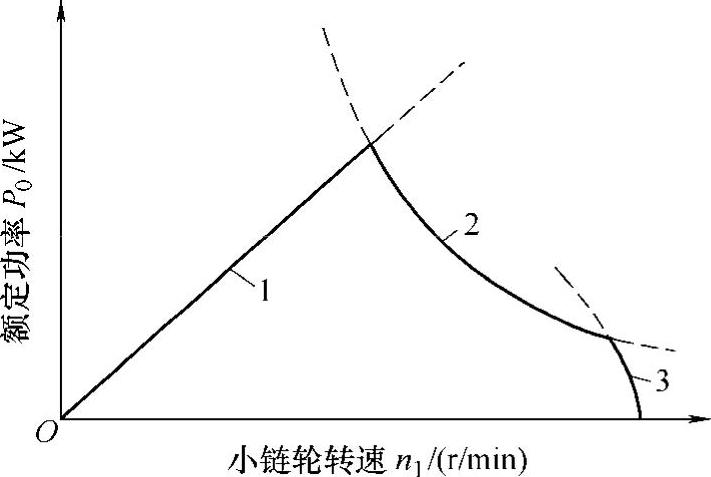
图6-17 滚子链额定功率曲线示意图
(2)设计准则 由上述失效形式可以得到链传动的设计准则:
对链速v>0.6m/s的中、高速链传动,采用以抗疲劳破坏为主的防止多种失效形式的设计方法;对链速v<0.6m/s的低速链传动,采用以防止过载拉断为主要失效形式的静强度设计方法。
工程上多用链速v>0.6m/s的套筒滚子链传动,失效形式主要有链条的疲劳破坏、链条铰链的磨损和胶合、链条的多次冲击破断和链条的过载拉断。由于链传动的承载能力受到多种失效形式的限制,因此不能用类似带传动的方法去推导出单排链传递功率的设计式,而是综合考虑各种失效形式的影响,用实验的方法得到在特定条件下各型号链条所能传递的功率P,再绘制成实用功率曲线图供设计用。图6-17为在标准实验条件下,A系列常用滚子链的额定功率曲线,由此可查出相应链条在链速v>0.6m/s情况下允许传递的额定功率。在实际设计中,小链轮齿数、传动比、中心距和链的排数等条件往往与实验时采用的特定条件不同,故应引入相应的修正系数,根据修正后的功率在图中选择链条型号。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




