全桥变换器拓扑是目前国内外DC-DC变换器中被广泛使用的拓扑之一,尤其适合用在大功率场合。与单端变换器和半桥变换器相比,全桥拓扑结构开关器件断开时,承受的电压等于电源电压,开关导通时的电流峰值等于输入平均电流,开关应力较小。
图5-33示出全桥隔离充电器主电路,图中,Vdc是经过带滤波电容的整流电路整流后得到的直流电压,VI1~VI4是4只功率开关管,T为高频变压器,原副边匝比表示见图5-33。发电机输出的交流电,经带滤波电容的全桥整流电路后,得到直流电压Vdc。直流电通过功率器件的开关转换,变为高频交变的PWM电压信号,这种变化的电压信号经过隔离变压器变压后,再经全波整流和LC滤波电路后,得到所需要的直流电Vo给蓄电池充电。
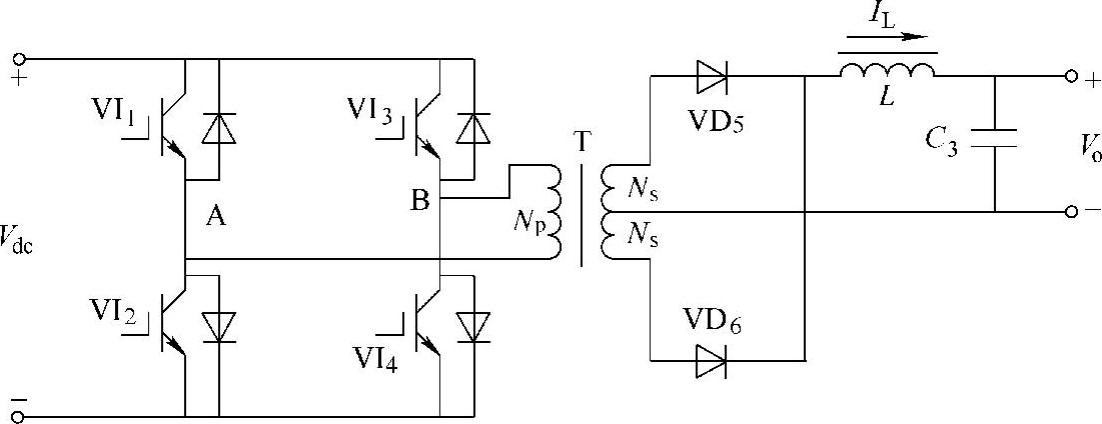
图5-33 全桥隔离充电器主电路图
对于全桥直流变换器,其功率器件的通断控制有很多种方法,下面介绍两种常用的PWM控制和移相控制方法。当采用PWM控制方式时,直流电压Vdc加在VI1~VI4四只开关管构成的两个桥臂上。为了使控制方式相对简单些,使成对角线的两只开关管同时导通或关断。由于同一个桥臂上的两只管子互补导通,这样就使VI1、VI4和VI2、VI3以小于50%的占空比交替导通,经过变压器的耦合,在变压器的副边将得到按某一占空比D变化的正负半周对称的交流方波电压,经整流滤波后得到直流电压,控制电路通过调节占空比,就能够实现输出电压Vo的调节。
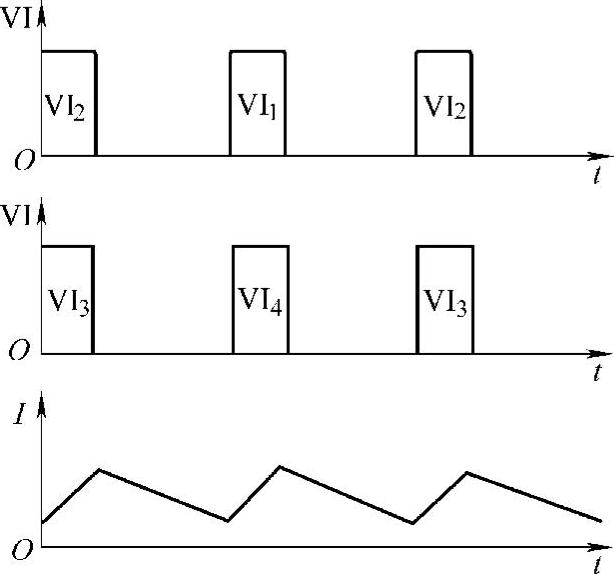
图5-34 功率器件的驱动波形 和电感L上的电流波形(www.daowen.com)
功率器件的驱动波形和电感L上的电流波形如图5-34所示,当VI2、VI3或VI1、VI4导通时,输入端便会通过变压器向负荷传送功率;当VI2、VI3、VI1、VI4均关断时,此时负荷电流将通过整流二极管VD5、VD6续流,同时滤波电容C2为负荷继续提供能量。该种PWM控制方式可以由TL494,SG3525等专用控制芯片来实现。
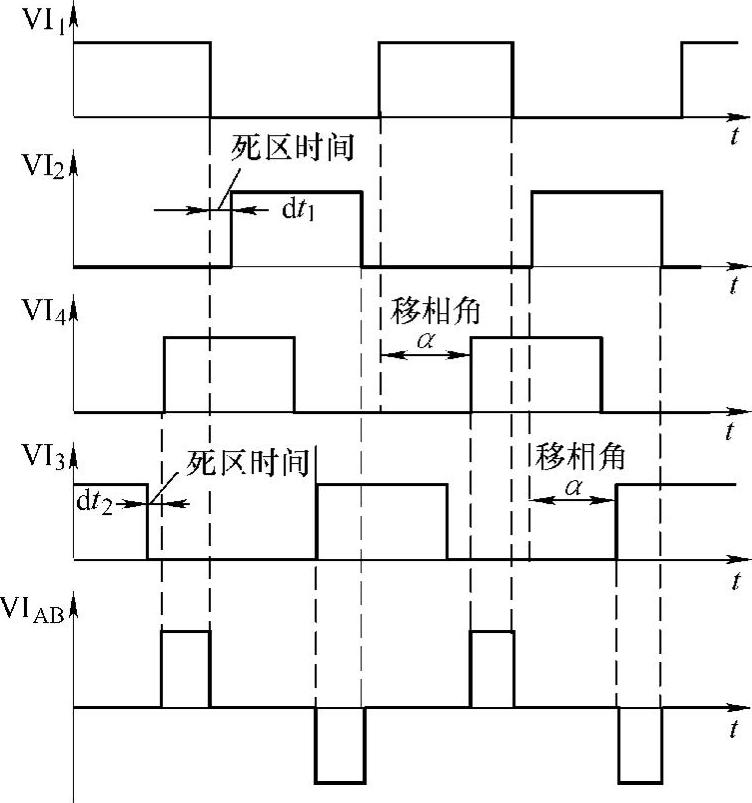
图5-35 移相控制全桥变换器工作原理波形图
移相控制是指处于对角线上的两只开关管的驱动脉冲不同步,它们之间相差一个移相角α,通过动态调节移相角α的大小来维持输出电压的稳定,在整个调节过程中脉冲宽度保持不变。移相控制全桥变换器工作原理波形如图5-35所示。VI4管滞后VI1管α角之后导通,VI3管滞后VI2管α角之后导通。若忽略死区影响,变压器原边电压为零的时间等于移相角α对应的时间。显然,通过调节α移相角就可以控制输出电压的大小。对α移相角实时调节,可以通过移相控制专用集成芯UC3875、UC3879来完成。UC3875的内部结构框图如图5-36所示,它具有驱动输出、相信号控制、软起动、误差调节器、死区时间设置,以及过流保护等功能。误差放大器的同相输入端3脚和反相输入端4脚构成输出电压闭环调节,维持输出电压的稳定;软起动功能引脚6,在片内与误差放大器的输出直接相连,由图5-36可知,当误差放大器的输出电压高于6脚电压时,误差放大器的输出电压被钳位在6脚电位,所以当芯片开始起动工作时,其输出脉宽从0开始慢慢变大,实现软起动功能。另外,当芯片供电欠压或发生过流时,6脚电压立即变为0V,从而快速封锁输出。为防止同一桥臂的两只管子直通,必须在两管的驱动脉冲之间设置死区。死区时间的设定,由芯片的7脚和15脚来实现的。通过调节RC时间常数,便可方便地设置死区时间。移相控制信号发生电路是UC3875的核心部分。振荡器产生的时钟信号经过VD的触发器二分频后,形成两路互补的方波信号,然后与延时电路及逻辑电路运算后,产生有死区间隔的OUTA和OUTB输出信号,且OUTA和OUTB与振荡时钟同步;PWM比较器将锯齿波和误差放大器的信号比较后,得到一个方波信号;该方波信号与时钟信号经过“或非门”后,送到RS触发器;RS触发器的输出口和D触发器输出Q运算后的信号,与延时电路及逻辑电路运算后,产生有死区间隔的OUTC和OUTD输出信号;OUTC和OUTD分别滞后OUTB和OUTA一定角度,即移相角α的大小决定于误差放大器的输出与锯齿波的交截点。UC3875共有4路输出驱动信号,每路均能提供2A的驱动峰值电流,驱动能力较强。
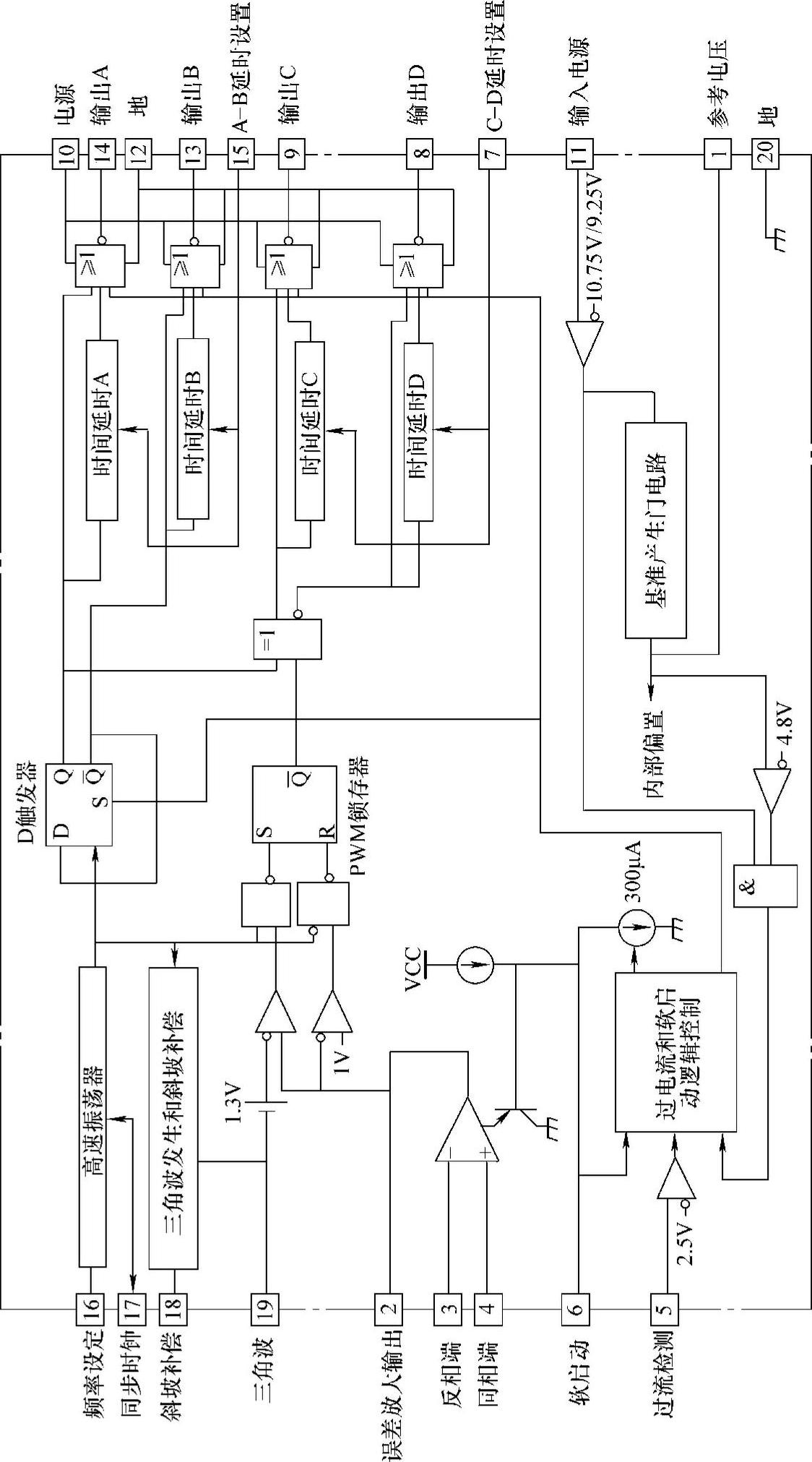
图5-36 UC3875的内部结构框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




