【摘要】:1)按照10.2节所述对变频器进行组态设置,首先根据模型所用电动机铭牌数据将电动机额定电压、额定电流、极对数等一系列参数进行设置,其次由于题目要求需要将变频器最大频率设为50Hz,加减速时间设为3s,最后对变频器IP地址进行设置如设为192.168.0.106,设置完成后下载即可。图10-31 Micro850控制器IP设置图10-32 “百米冲刺”控制程序图10-32 “百米冲刺”控制程序(续一)图10-32 “百米冲刺”控制程序(续二)
1)按照10.2节所述对变频器进行组态设置,首先根据模型所用电动机铭牌数据将电动机额定电压、额定电流、极对数等一系列参数进行设置,其次由于题目要求需要将变频器最大频率设为50Hz,加减速时间设为3s,最后对变频器IP地址进行设置如设为192.168.0.106,设置完成后下载即可。
2)将Micro850控制器的IP地址设与变频器设在同一网段内,可按图10-31所示进行设置。设置完成后即可编写程序,程序如图10-32所示。
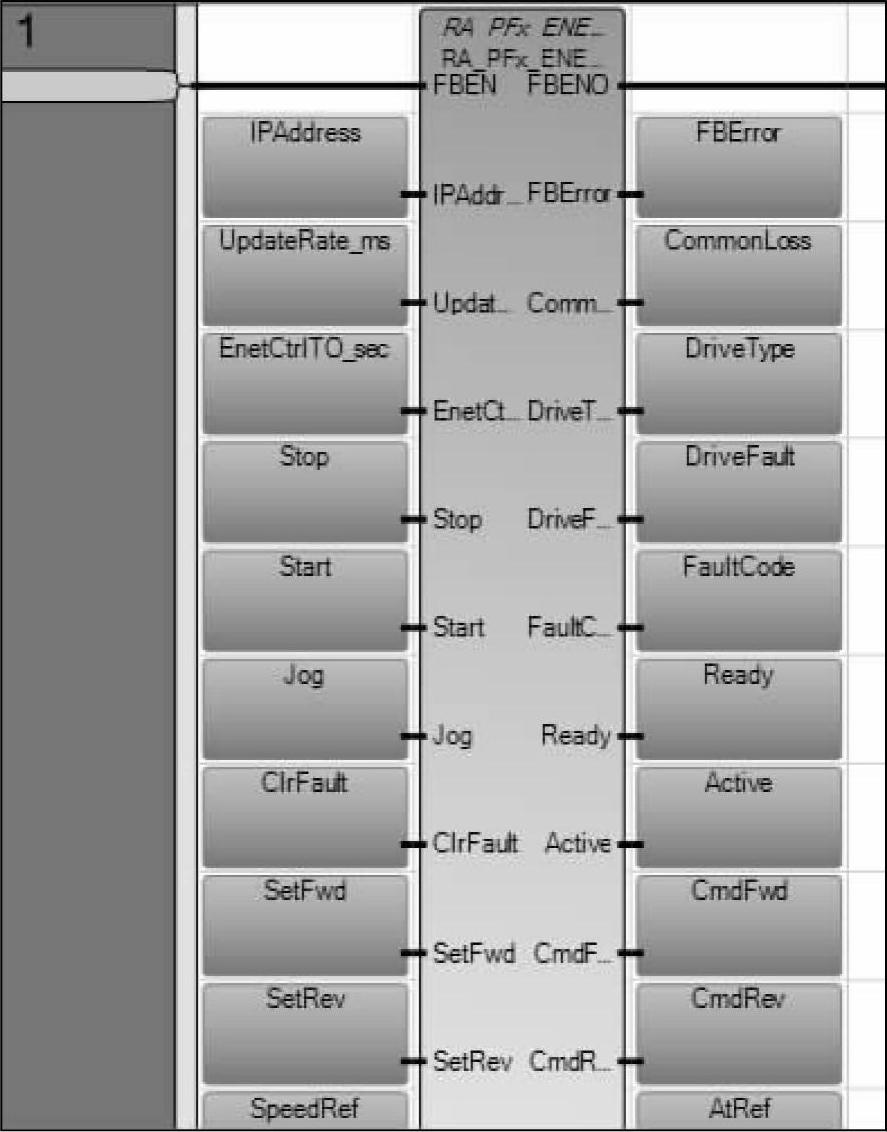
程序中,通过前面介绍的自定义功能块可以控制指针起停及左右移动,此外用到了HSC高速计数模块,量程转换模块,两者配合可以对指针进行位置确定,两模块的使用方法前面已有介绍。程序中名为hsc_enable的开关断开时,HSC及量程转换模块不工作,此时可以通过点动控制指针使其移动到初始位置(0cm)处完成“百米冲刺”初始准备。此外程序中,变量“Local_Now”代表指针当前位置,“Local_End”代表终点位置(25cm),t4为到达终点时冲刺所用时间。
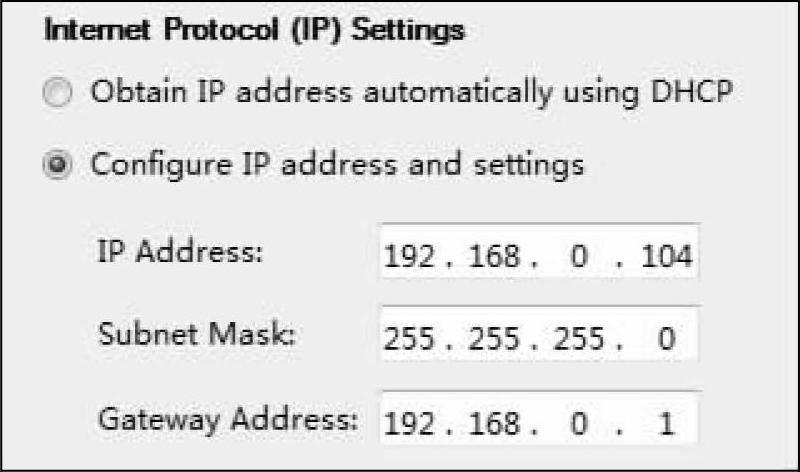
图10-31 Micro850控制器IP设置
 (www.daowen.com)
(www.daowen.com)
图10-32 “百米冲刺”控制程序
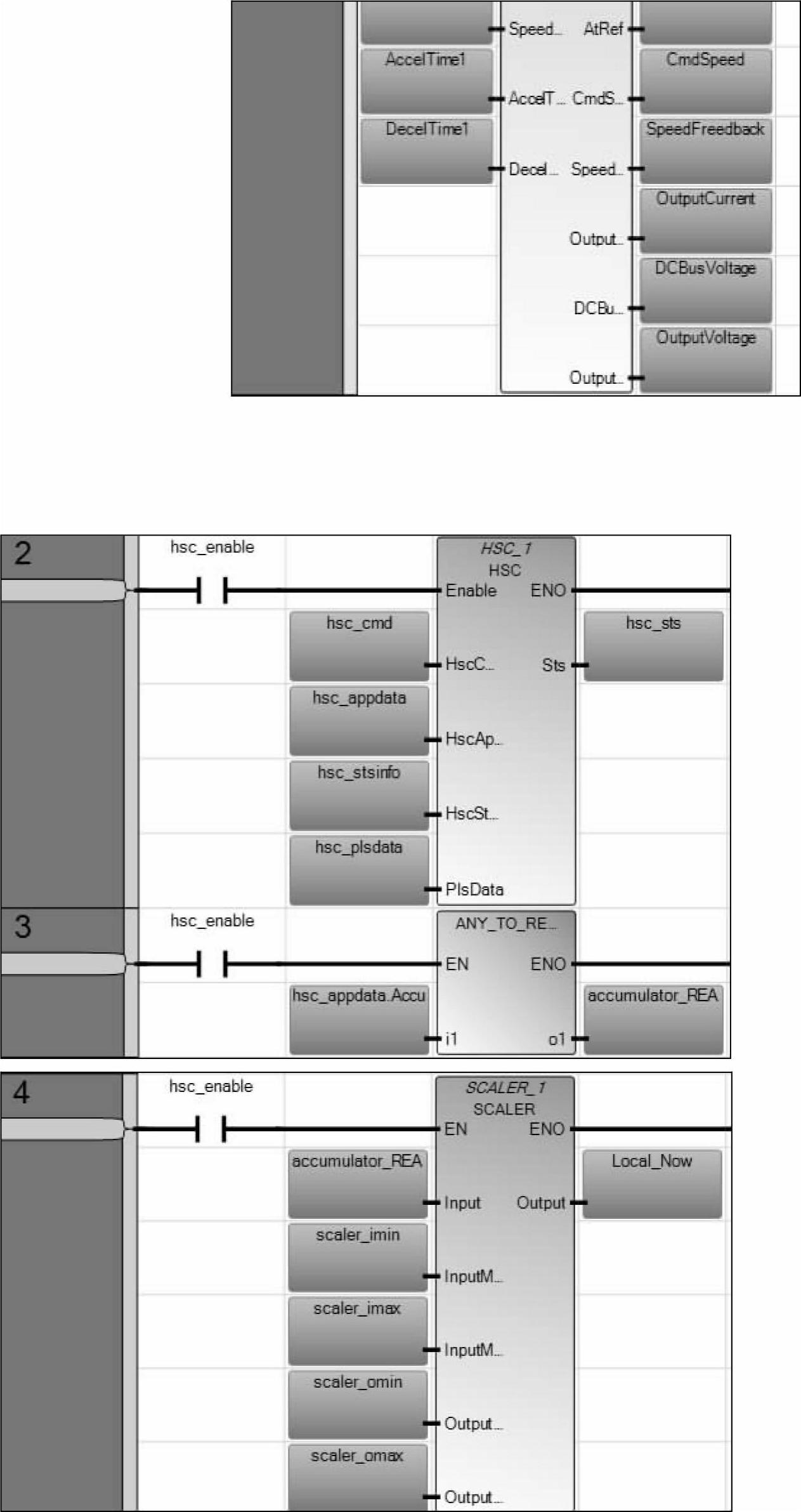
图10-32 “百米冲刺”控制程序(续一)
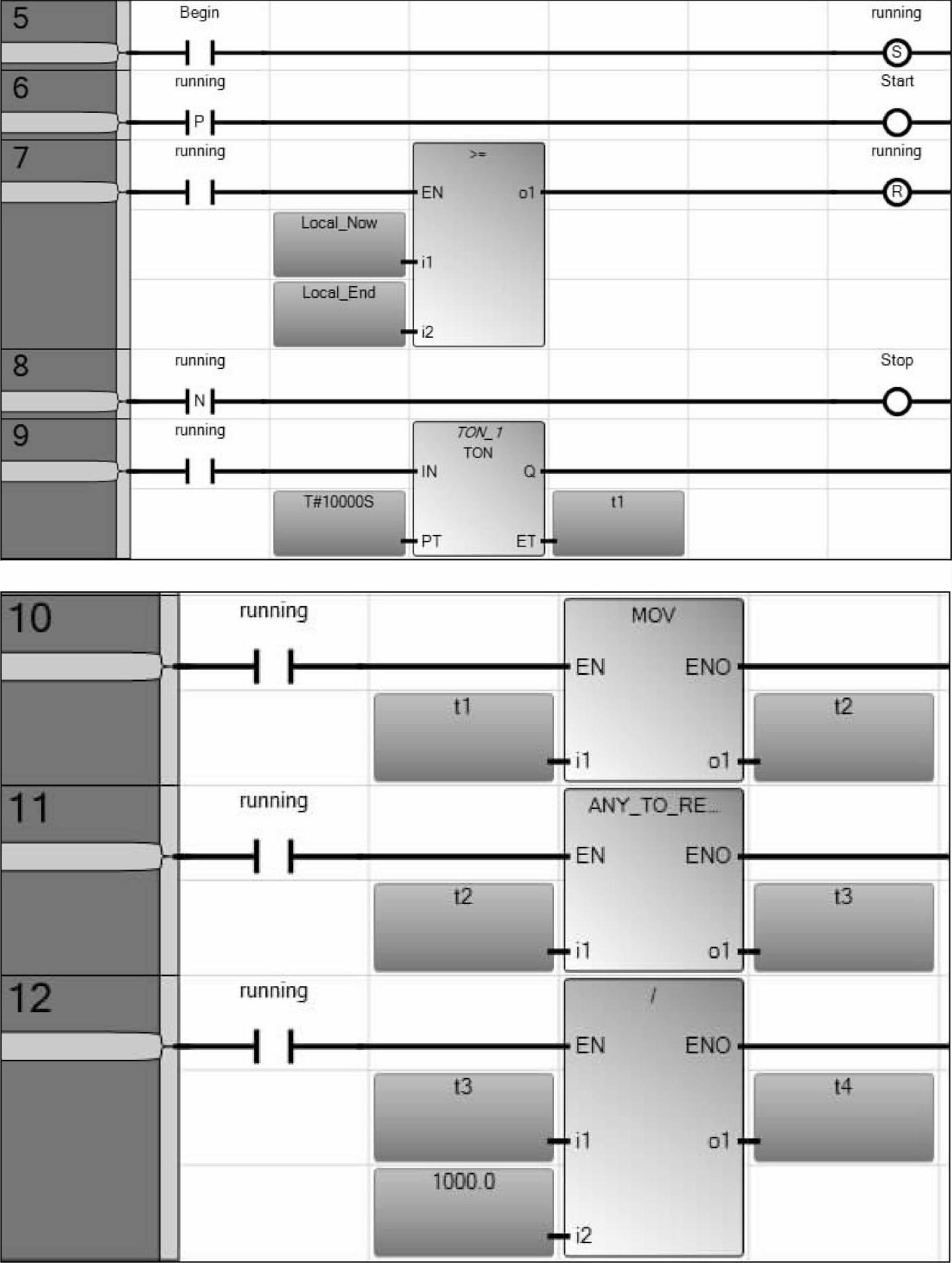
图10-32 “百米冲刺”控制程序(续二)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关循序渐进Micro800控制系统的文章







