如果要运行一个AutoTune序列,“ATParameters”输入必须先完成初始设置。“Gain”和“DirectActing”参数必须设定,且“DerivativeGain”也要设置(典型地为0.1)。
操作前应确保:
1)系统性能必须稳定。
2)IPIDCONTROLLER的“auto”输入设为FALSE。
3)设置“AT Param”,Load中的值即为IPIDCONTROLLER模块的输出值,而Load中的值必须大于Step的2倍。如果ATRest为TRUE,自动调节后,重置IPIDCONTROLLER,即IPIDCONTROLLER输出为0;如果ATRest为FALSE,程序运行后输出Load值,如图8-11所示。

图8-11 AT Param参数设定
“gains”和“outgains”中的DirectActing、ProportionalGain、DerivativeGain(典型为0.1)参数需设定,如图8-12所示。
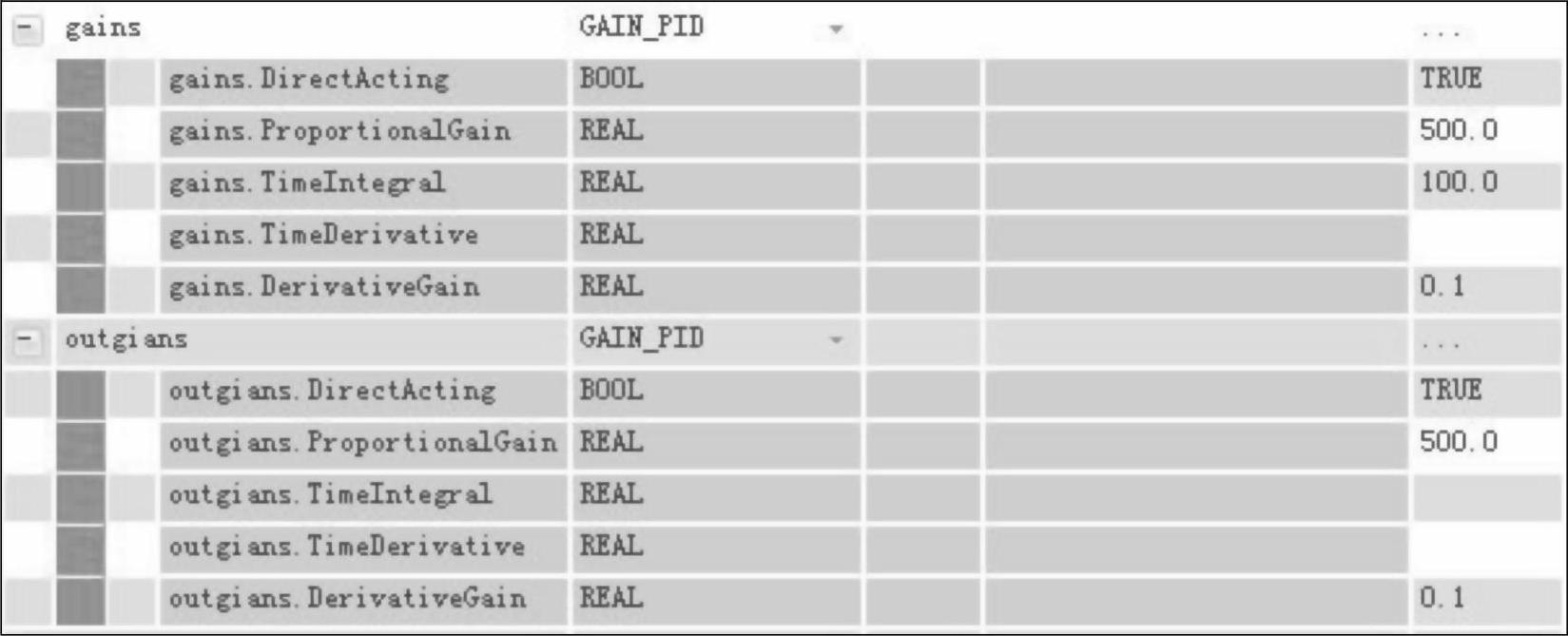
图8-12 “Gains”和“Outgains”参数设定
执行以下步骤完成自整定:
1)将“Autotune”输入设为TRUE,启动自动调节序列。
2)将“initialize”输入设为TRUE。(https://www.daowen.com)
3)将“initialize”输入更改为FALSE,完成initialize的初始化。
4)开始自动调节。atwarnings为“1”表示系统处于自动调节状态,如图8-13所示。
5)等待直到“atwarning”输出值变为“2”,即自动调节结束,如图8-14所示。

图8-13 自动调节
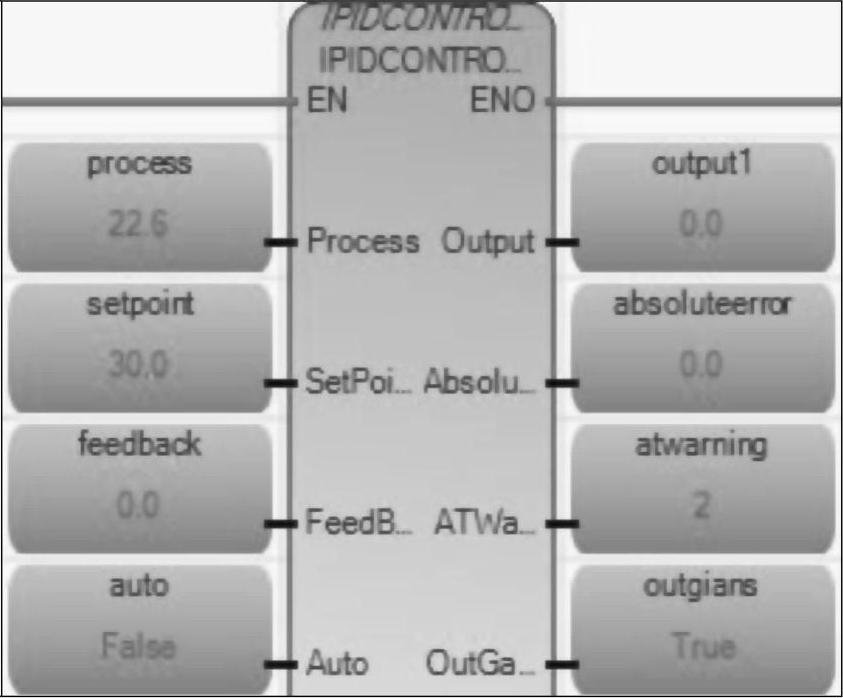
图8-14 自动调节结束
6)双击“outgains”即可得到整定后的值,如图8-15所示。
为了完成调试,需要一些基于过程和需要的微调。当设置“TimeDerivative”为0.0时,IPIDCONTROLLER强制“DerivativeGain”为1.0,此时变成一个PI控制器。
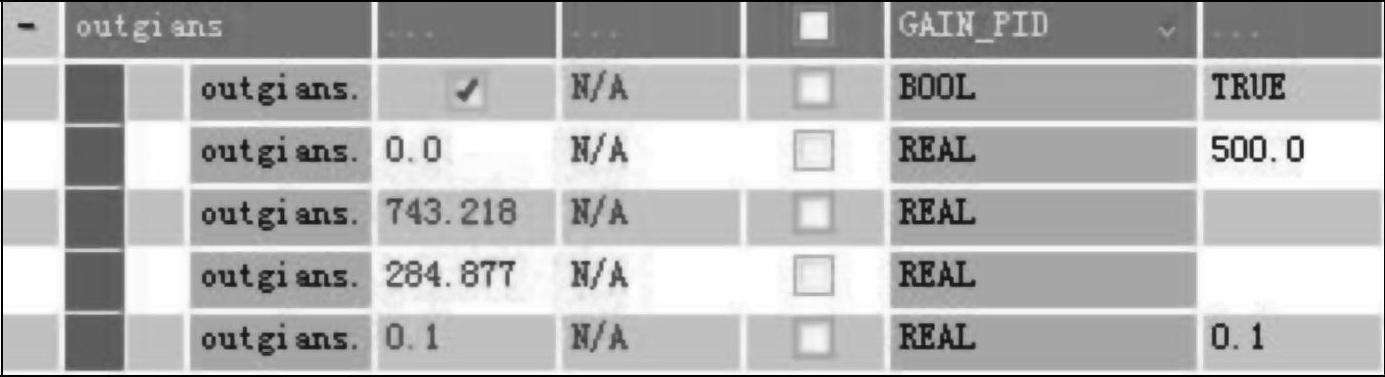
图8-15 PID自整定的返回值
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




