以一个简单的位置控制系统为例,该系统的控制要求如图7-45所示。

图7-45 位置控制要求
要求电动机从起点开始运动,以50mm/s的运动速度,运动至1000mm处,停留2s后,该处黄灯亮起。电动机继续以100mm/s的运动速度,运动至3000mm处,停留2s后,该处红灯亮起。之后电动机以300mm/s的运动速度运动到10000mm的位置,停留2s后,蓝灯亮起。其中定位的位置误差不超过1mm。
控制系统程序如图7-46所示。
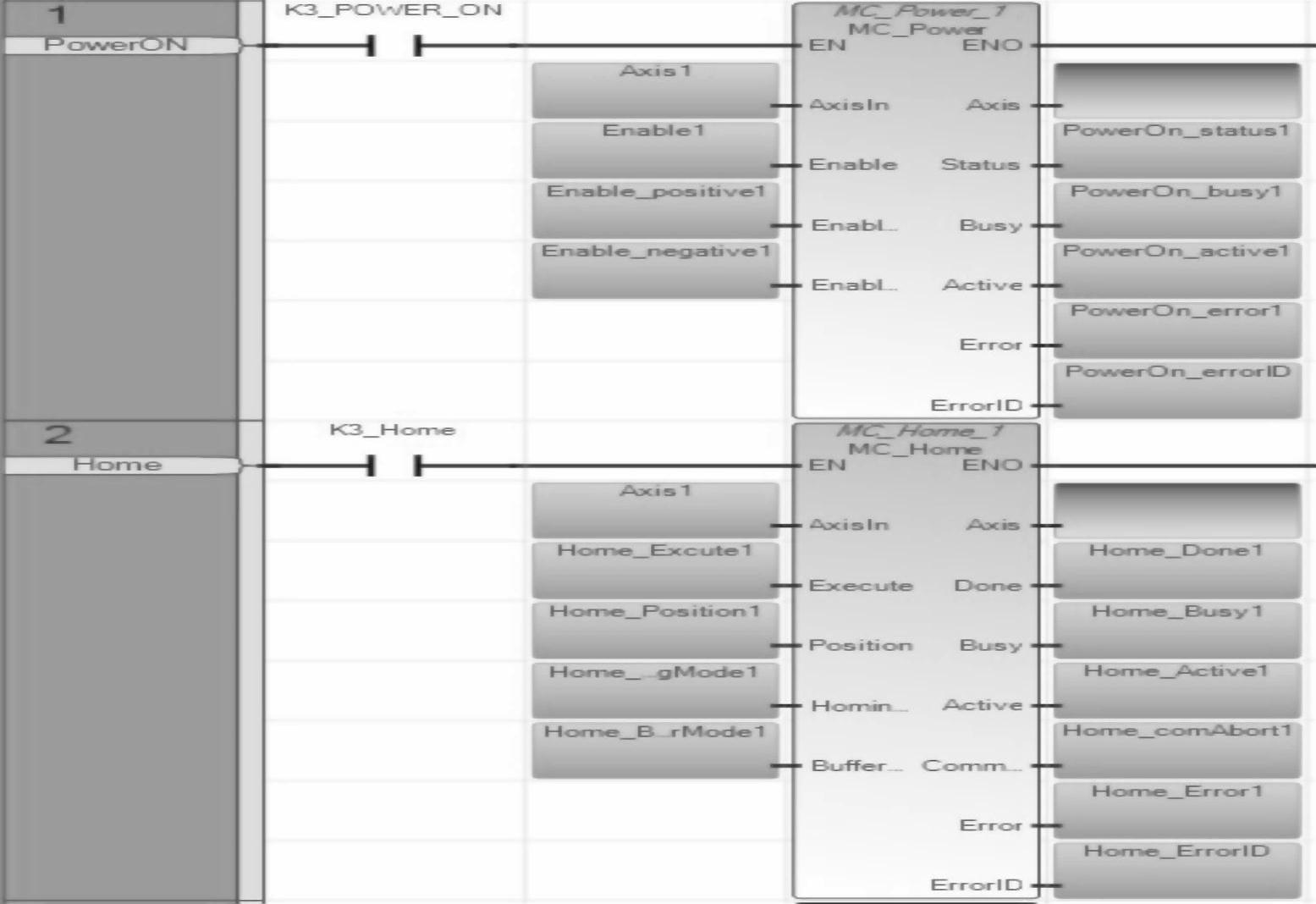
图7-46 位置控制系统程序
程序中使用了PTO模块的MC Power、MC Home、MC MoveAbsolute功能块,在使用MC MoveAbsolute之前需要给Kinetix 3模块驱动使能,需要用到MC Power模块,并需要用MC Home模块设置原点,故需要用到MC Home模块设置原点,接下来可以使用MC MoveAbsolute模块来控制电动机运动,如图7-47所示。
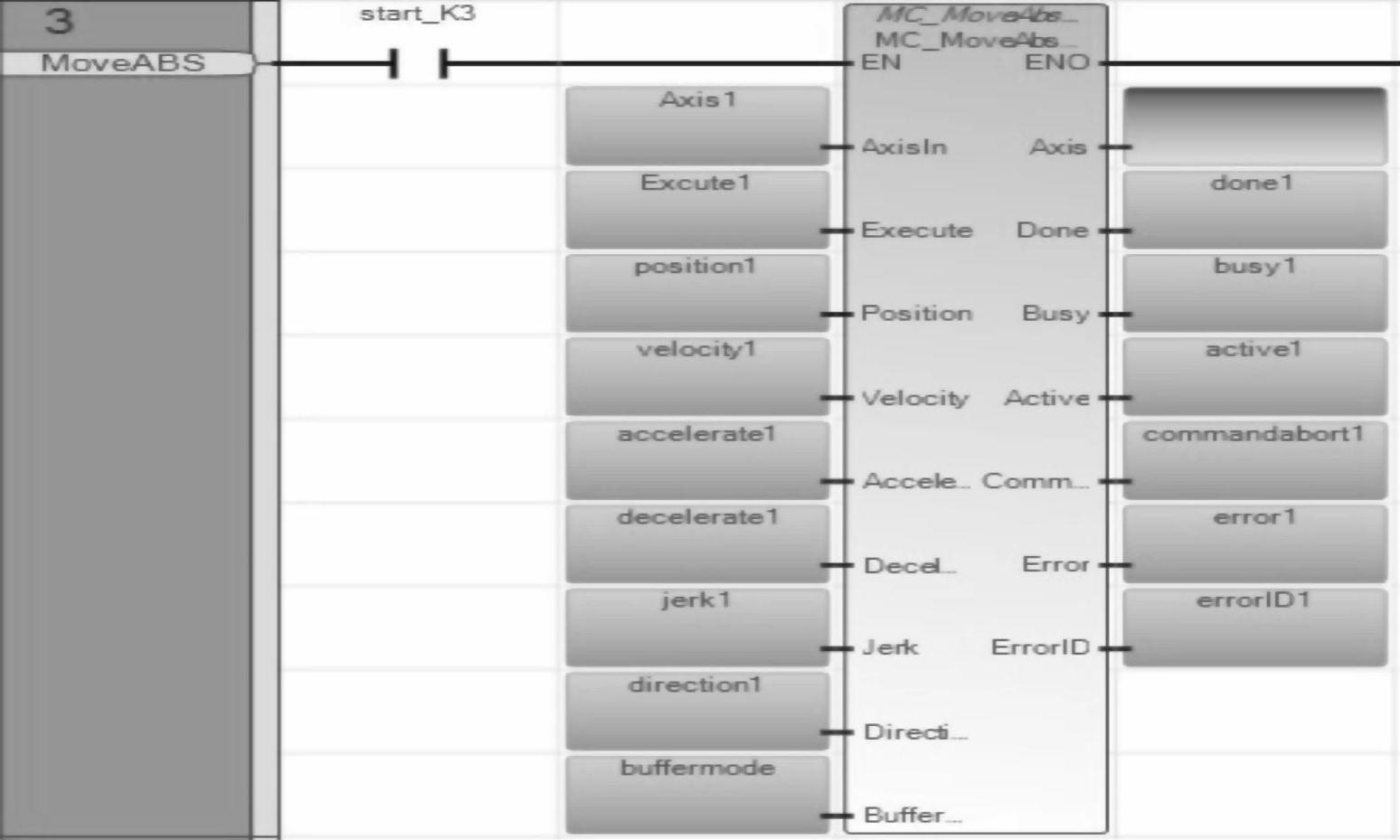
图7-47 MC MoveAbsolute模块
 (www.daowen.com)
(www.daowen.com)
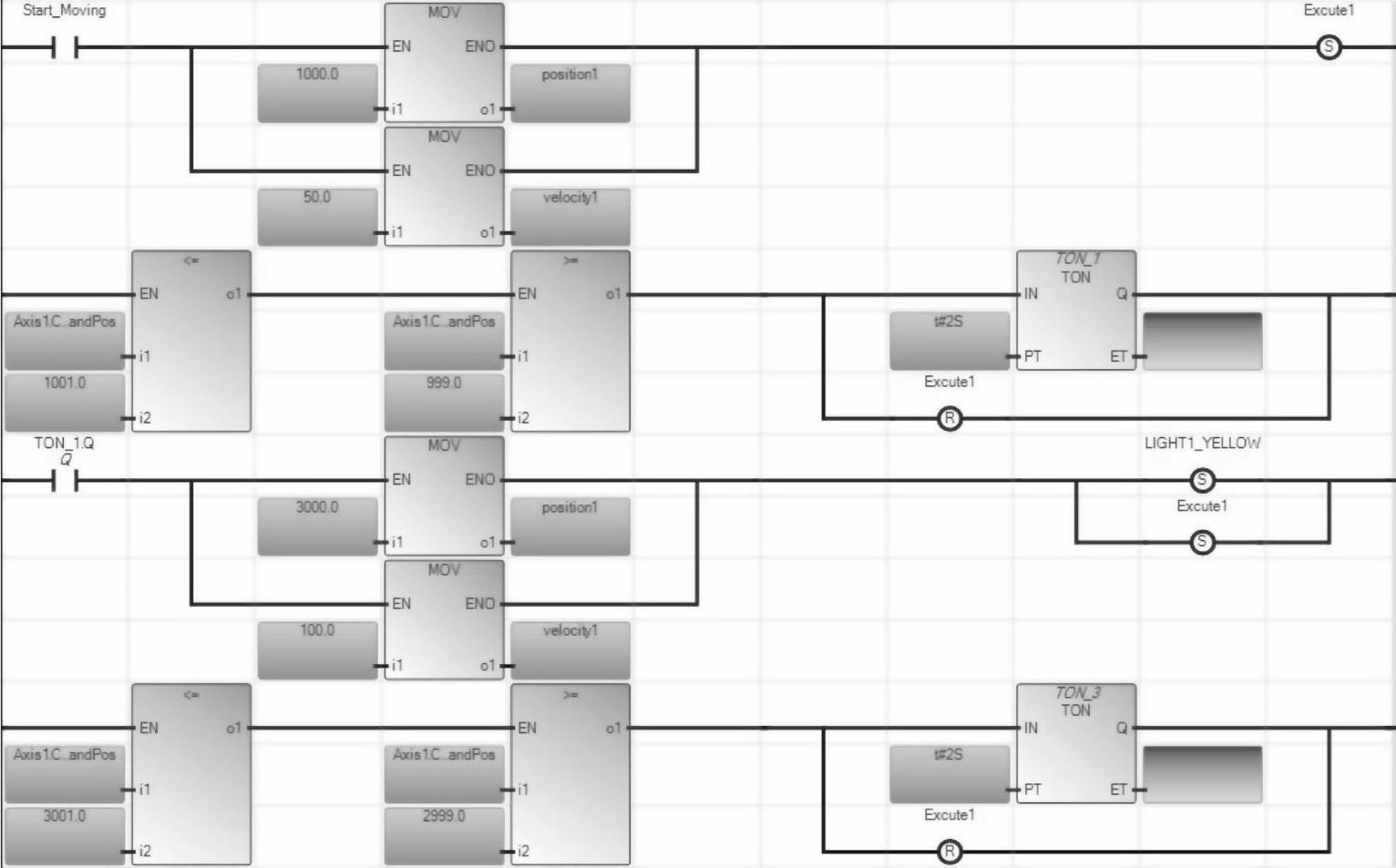
图7-48 第一阶段程序
程序第一阶段设置位置1000和速度50,然后给MC MoveAbsolute模块一个起动命令,起动电动机以给定速度运行,当达到999~1001mm之间时起动定时器定时2s后亮黄灯,并且起动第二阶段程序。
第一阶段程序如图7-48所示。
程序第二阶段设置位置3000和速度100,然后给MC MoveAbsolute模块一个起动命令,起动电动机以给定速度运行,当达到2999~3001mm之间时起动定时器定时2s后亮红灯,并且起动第三阶段程序。第二阶段程序如图7-49所示。
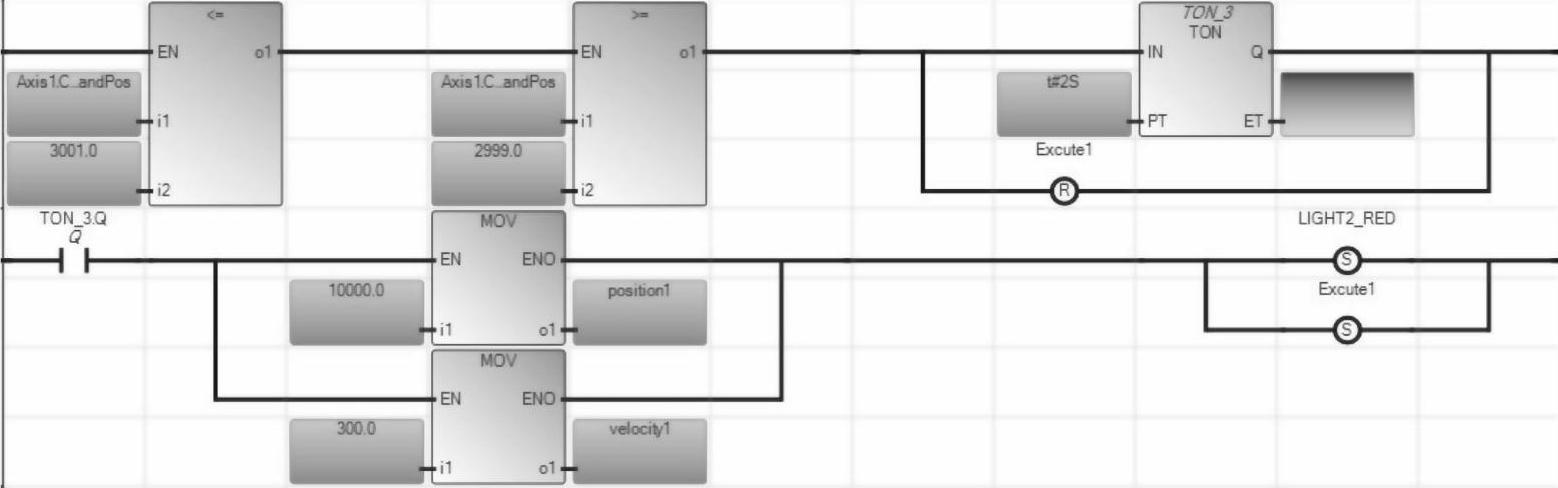
图7-49 第二阶段程序
程序第三阶段设置位置10000和速度300,然后给MC MoveAbsolute模块一个起动命令,起动电动机以给定速度运行,当达到9999~10001mm之间时起动定时器定时2s后亮蓝灯。第三阶段程序如图7-50所示。
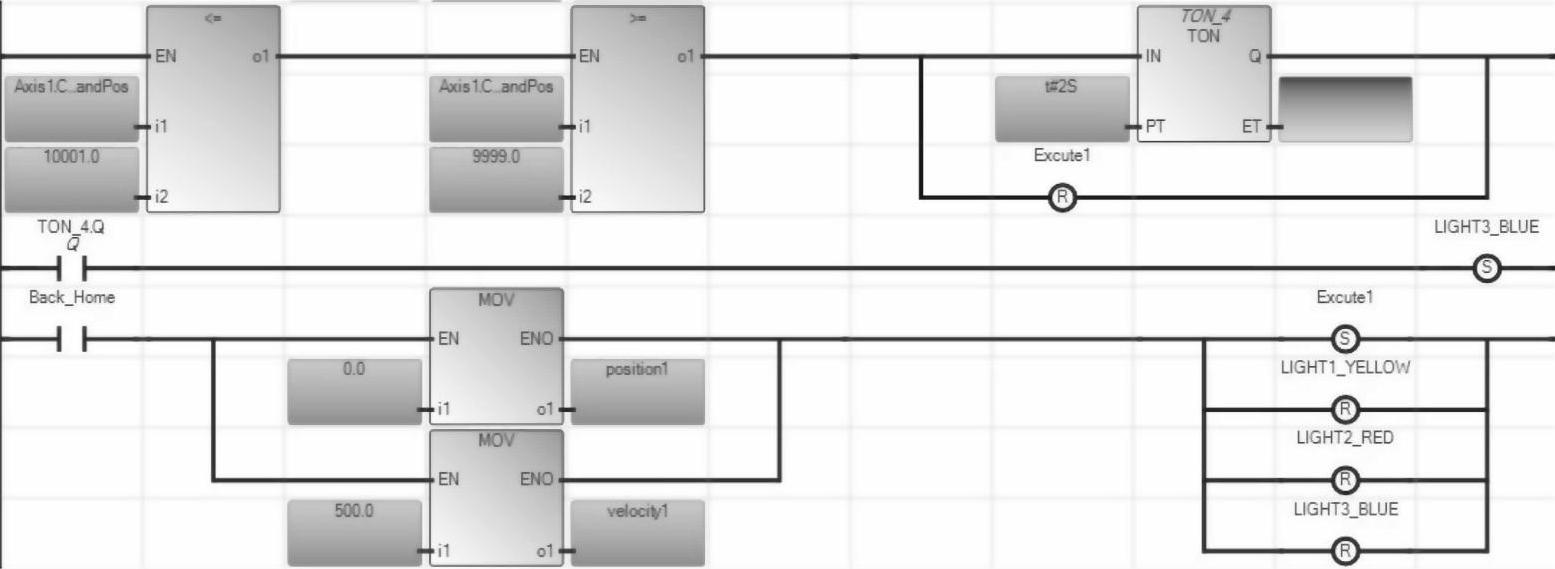
图7-50 第三阶段程序
程序中另设返回按钮,使电动机以500速度返回原点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



