下面具体说明如何设置运动控制功能来控制PTO口输出特定频率的脉冲,以使得电动机到达指定位置。
在使用运动控制功能块之前,除了需要配置好PTO功能块以外,还需要将驱动器置于Follower模式下(使用面板将Pr-0.00号参数设置为1),即让驱动器跟随PTO口发送的脉冲来运动,因为脉冲个数和频率是可控的,脉冲个数、频率跟运动距离是对应的(在配置PTO口的时候设置的用户定义单位一处设置),这样便可以知道到达指定位置需要发送多少个脉冲,通过这种方式可以实现位置的精确控制。
在CCW中创建一个例程,例程中加入MC Power、MC MoveRelative、MC MoveAbso-lute、MC Homing、MC Reset、MC ReadStatus、MC MoveVelocity等模块,创建好相应变量后,先启动MC Power,使能Enable引脚,如图7-35所示。
此时Status位和active位同时置1,控制器中O0.6(之前设置的使能位输出)置1,表示电动机驱动已成功使能。然后设置MC MoveRelative模块,将位置设置为1000mm,速度设置为每秒50mm,并使能MC MoveRelative模块,Execute置1。可以看到Busy和Active位置1,表示模块正在运行,如图7-36所示。
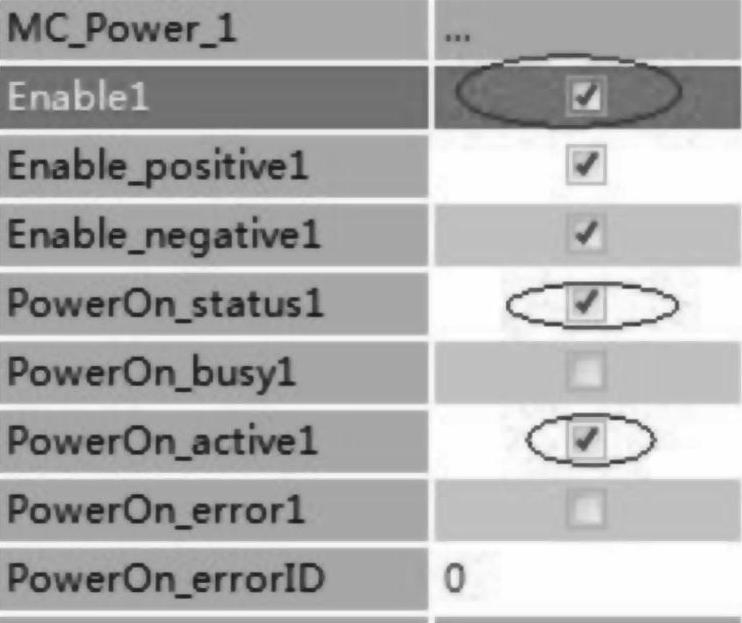
图7-35 MC Power模块使能(www.daowen.com)
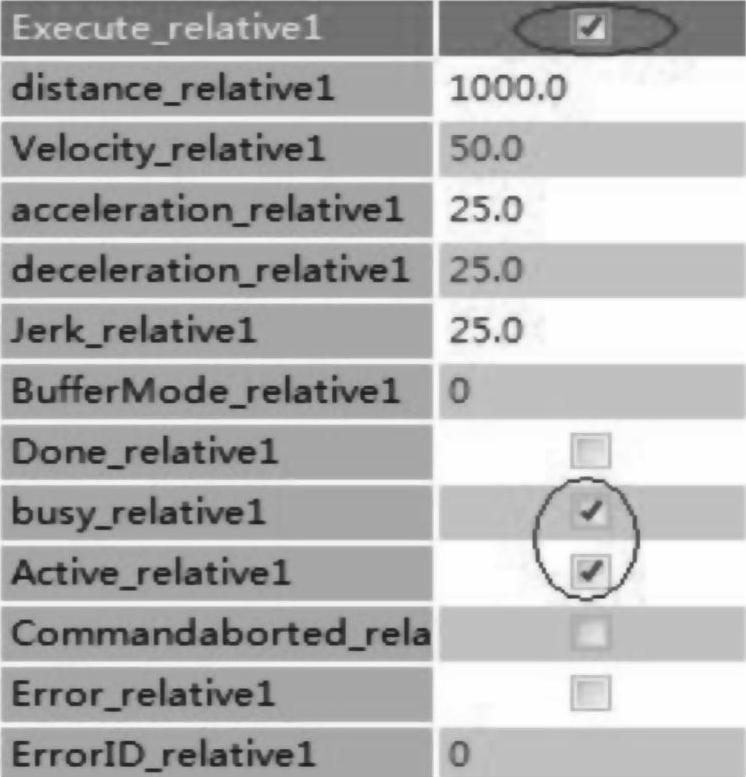
图7-36 MC MoveRelative模块使能
电动机处于运行的过程中,可以查看Axis1的状态,可以看到CommandPos一项在增加,增加到1000则电动机停止运行,这样便完成了1000mm的精确定位。查看Axisl的状态如图7-37所示。
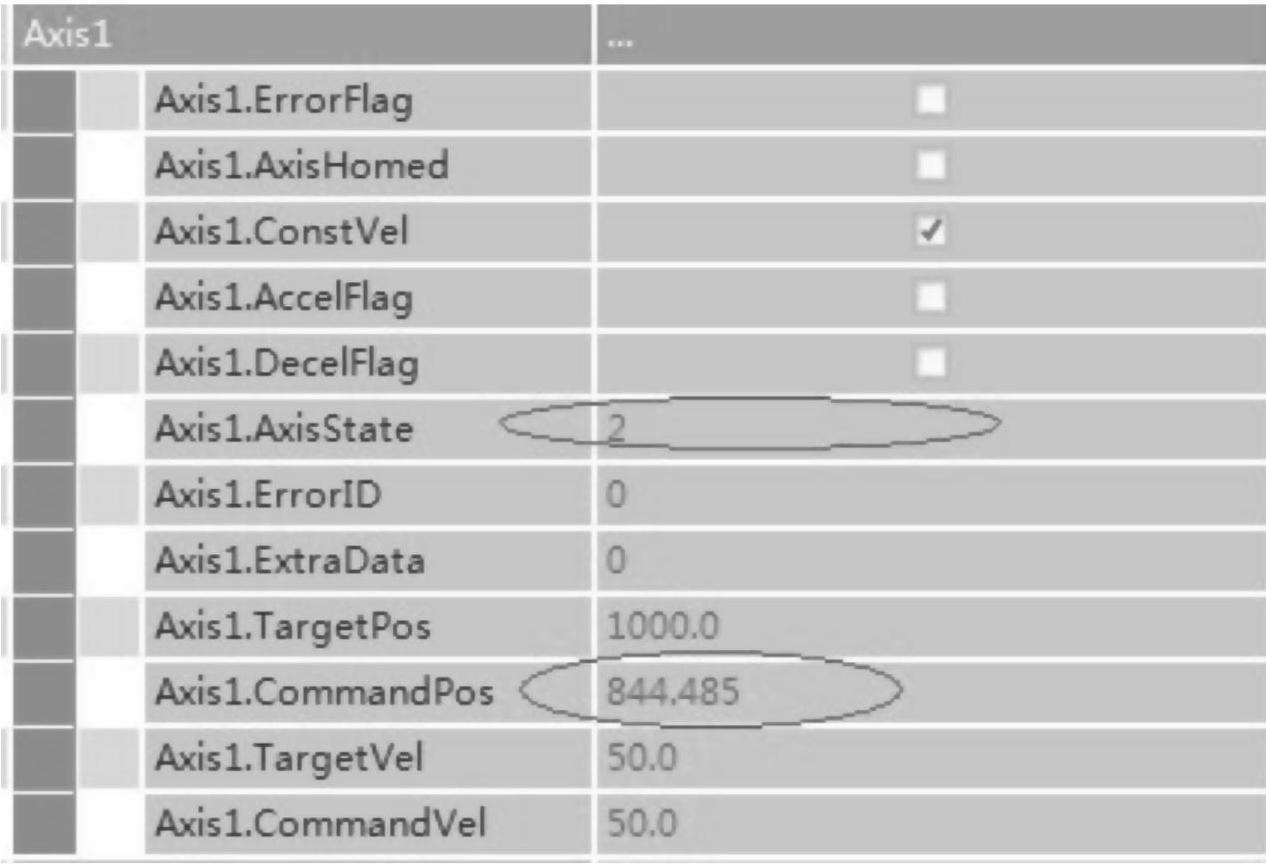
图7-37 查看Axis1的状态
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





