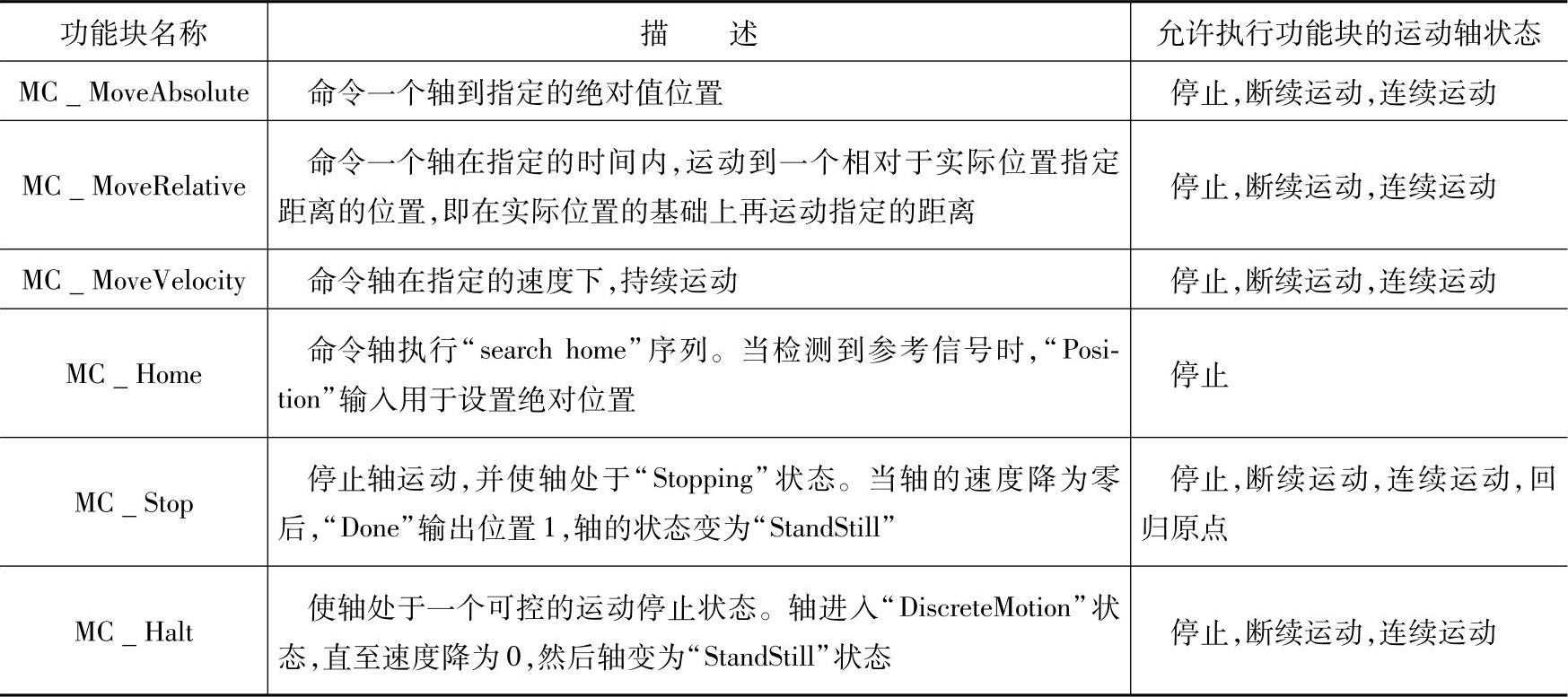
配置完PTO相关参数以后,可以使用运动控制功能块来控制PTO块的执行,运动控制功能块分为两类:一类是命令类功能块,主要用来对PTO相关参数进行监控和设置;另一类是动作方式类功能块,主要用来控制PTO口输出特定频率的脉冲以使得电动机到达指定位置。命令类功能块见表7-9,动作方式类功能块见表7-10。
表7-9 命令类功能块

表7-10 动作方式类功能块
运动控制块比较多,这里只对几个比较重要的功能块进行简单的介绍。
1.MC Power功能块
功能块如图7-26所示,该功能块的作用是使能所要控制的轴的驱动(即Drive Enable)。
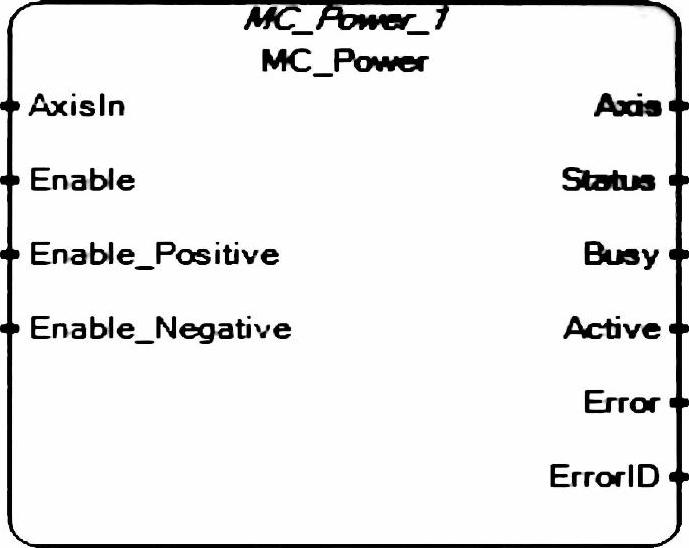
图7-26 MC Power功能块
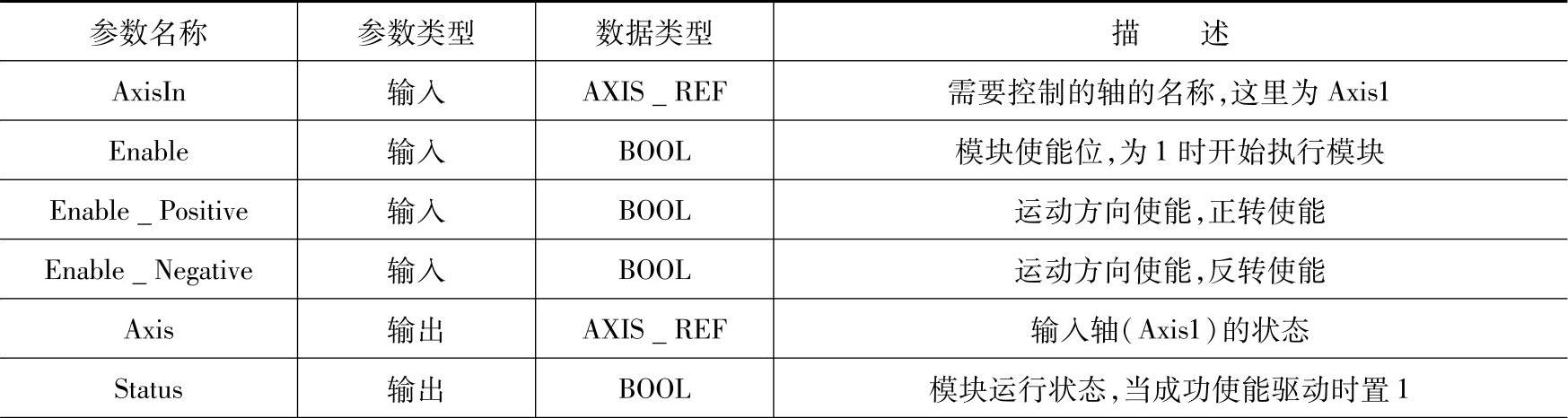
因为在PTO配置时配置过驱动使能口为O.06口,因此,当MC Power功能块使能时,O.06口会置1,使得驱动使能。该模块各个参数见表7-11。
表7-11 MC Power模块参数列表
(续)

2.MC MoveRelative功能块
MC MoveRelative功能块如图7-27所示,该功能块的作用是根据设定的距离和速度驱动电动机移动相应的距离,是相对运动模块,运动的位置是在电动机当前位置基础上继续运动指定的距离,区别于绝对运动模块(MC MoveAbsolute)。该模块具体参数见表7-12。
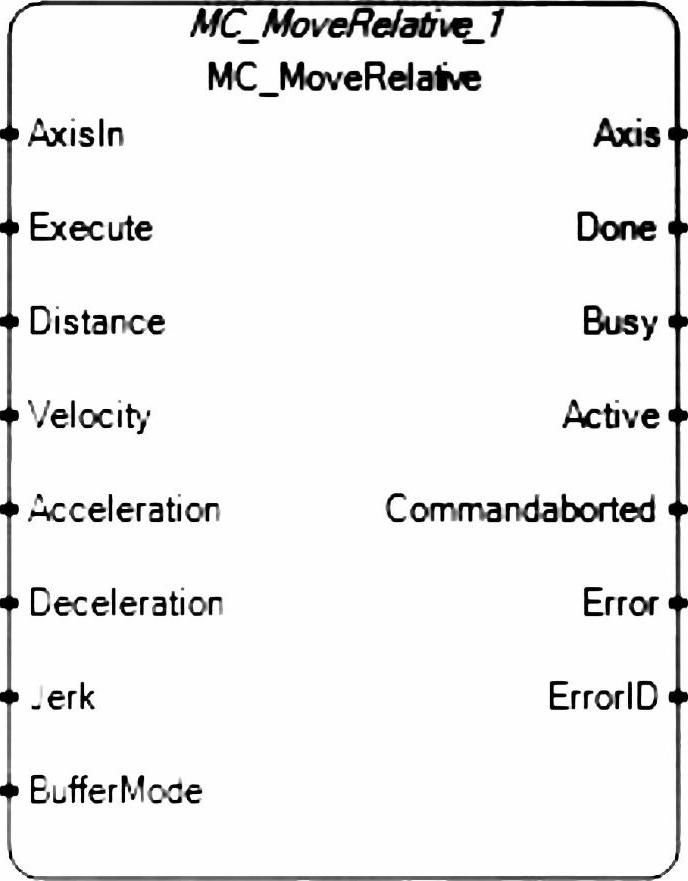
图7-27 MC MoveRelative功能块
表7-12 MC MoveRelative模块参数列表

由于功能块一些引脚的含义相同,如Busy、Active、Error、ErrorID等,下表中不再赘述。
3.MC Home功能块
功能块如图7-28所示,该功能块的作用是在进行电动机绝对位置运动之前,先设定一个原点,以该点作为原点,绝对运动在该位置的基础上进行相对于原点的绝对运动。在运行MC MoveAbsolute命令之前,必须运行该模块。
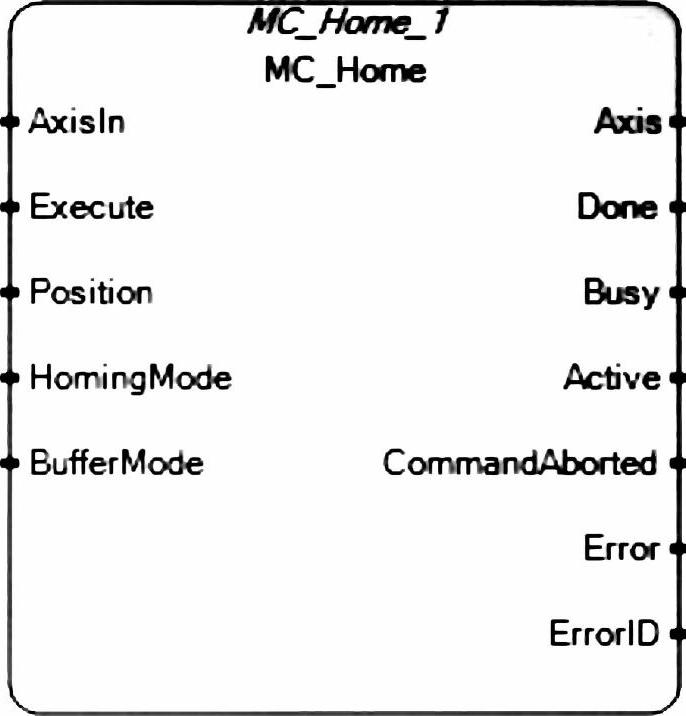
图7-28 MC Home功能块
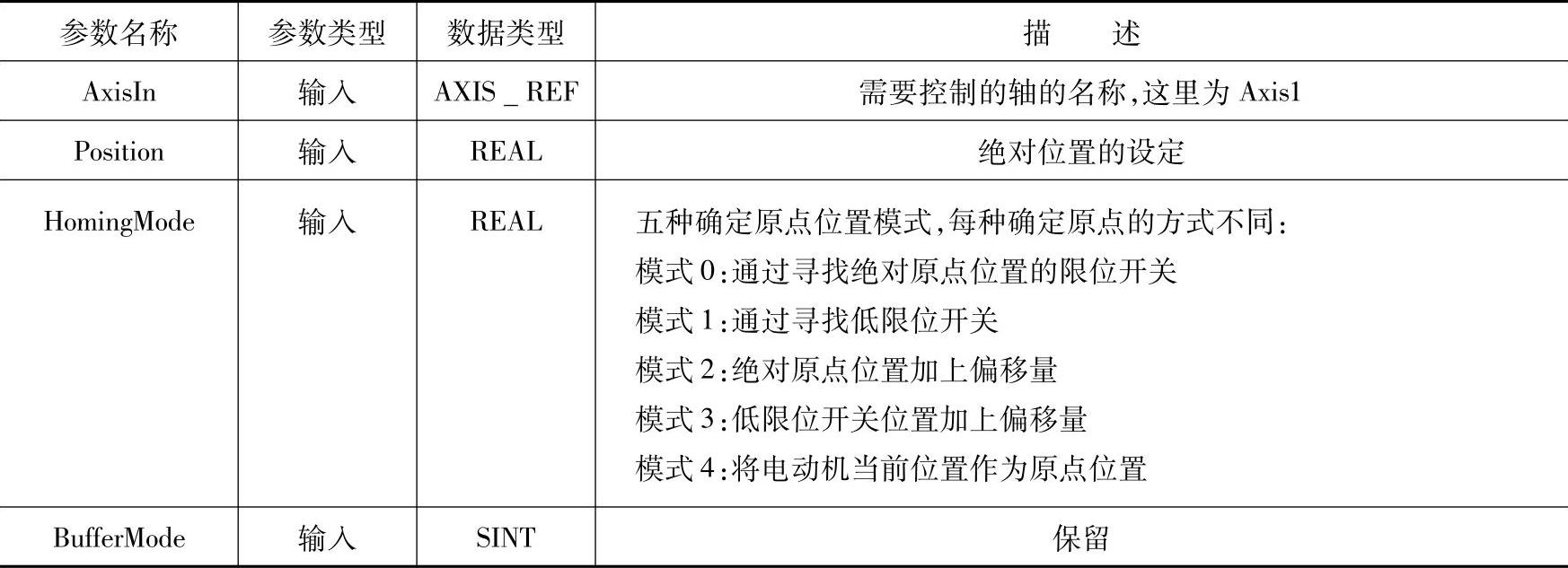
该模块的参数见表7-13。
由于Excute、Done、Busy、Active、CommandAborted、Error、ErrorID的含义与之前的模块相同,因此这里不再赘述。
表7-13 MC Home模块参数列表
4.MC MoveAbsolute功能块
功能块如图7-29所示,该功能块的作用是控制电动机按照设定的速度、加速度进行绝对位置的移动。执行该功能块之前,需要先使用MC Homing模块确定原点的位置,才能使用该模块。表7-14中列出了该模块的参数。
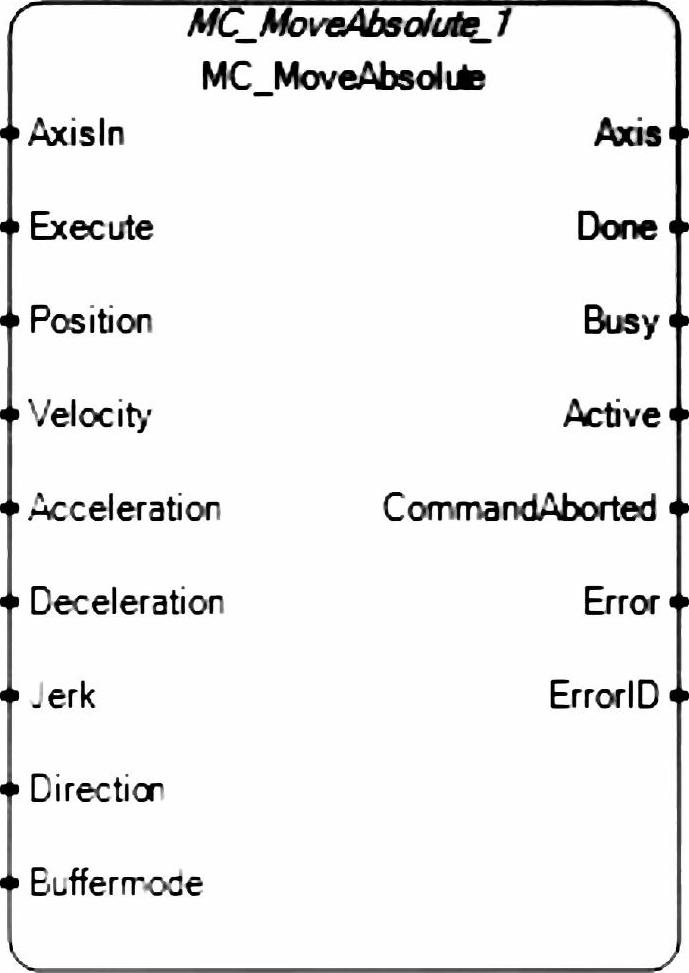
图7-29 MC MoveAbsolute功能块
表7-14 MC MoveAbsolute模块参数列表
 (www.daowen.com)
(www.daowen.com)
5.MC MoveVelocity功能块
功能块如图7-30所示,该功能块的作用是让电动机以指定的速度运行,因为没有限定运行位置,该电动机会一直运行下去,直到发出停止命令(用MC Stop或者MC Halt模块)。
表7-15中介绍了该模块的参数,重复的参数不再赘述。
6.MC Stop功能块
功能块如图7-31所示,该功能块的作用是让电动机停止运转。由于该功能块某些引脚的含义之前都介绍过,这里不再介绍了。
7.MC Reset功能块
功能块如图7-32所示,该功能块的作用是重置轴的错误状态。由于该功能块某些引脚的含义之前都介绍过,这里不再介绍了。
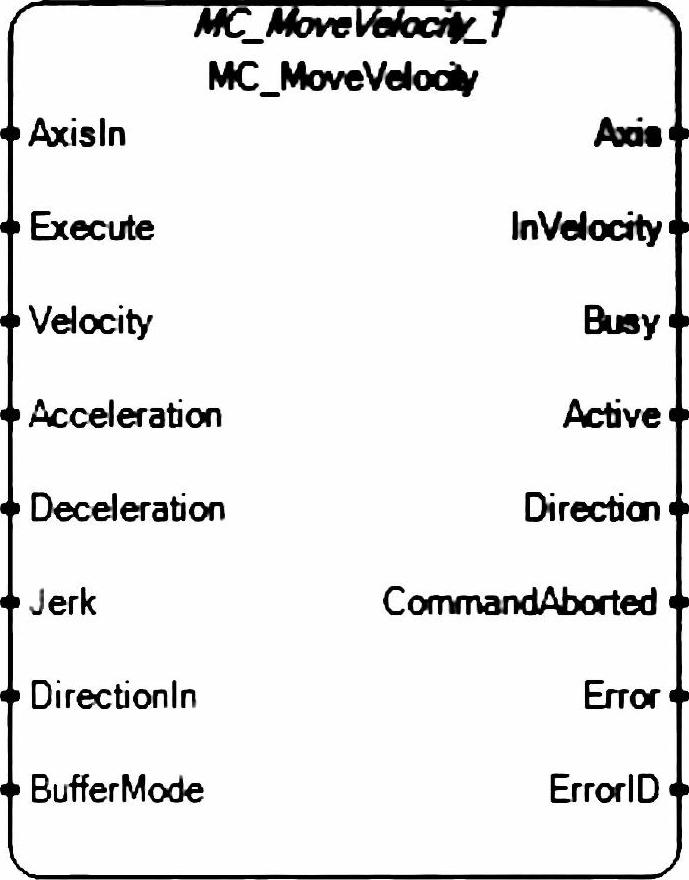
图7-30 MC MoveVelocity功能块
表7-15 MC MoveVelocity模块参数列表
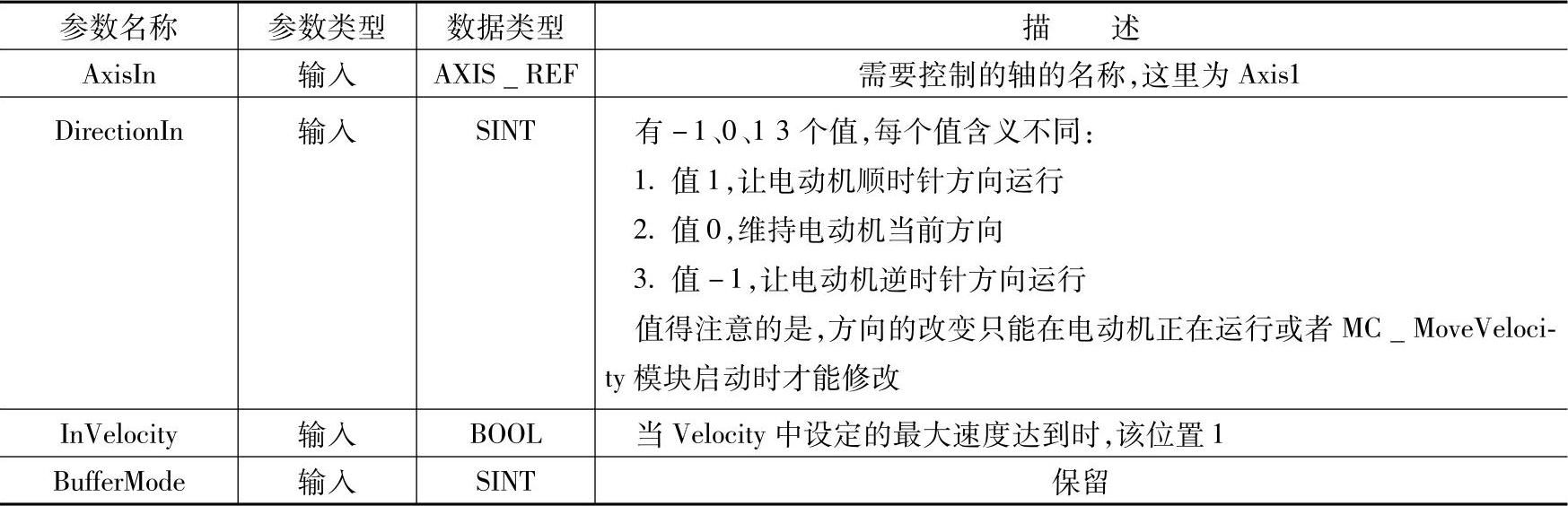
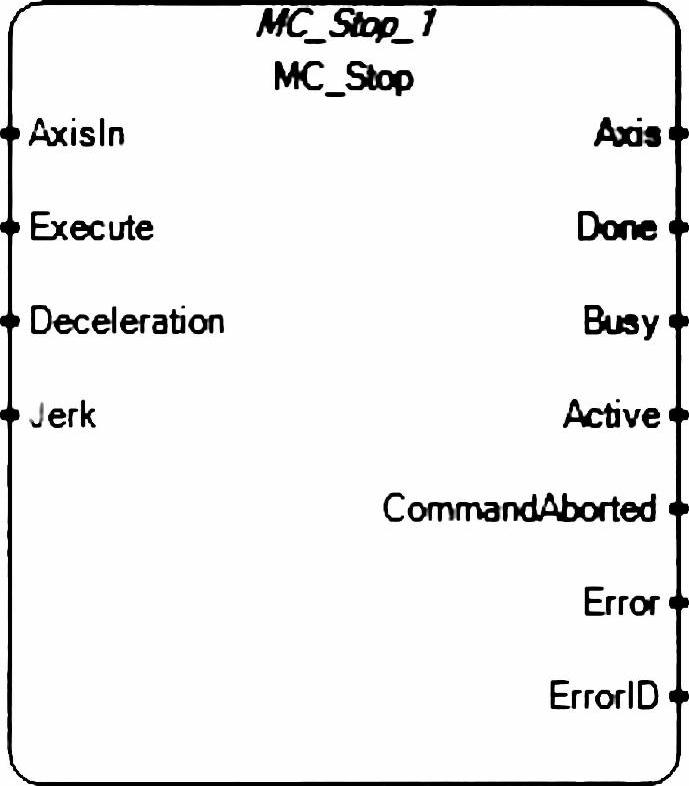
图7-31 MC Stop功能块
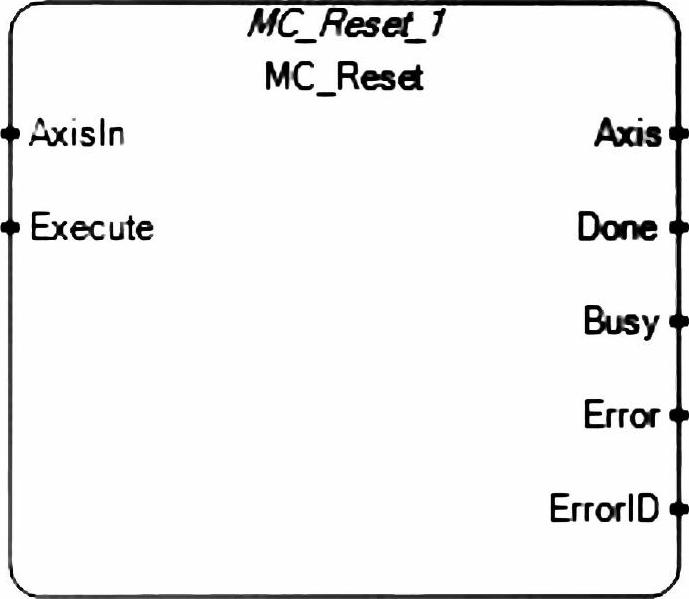
图7-32 MC Reset功能块
8.MC ReadStatus功能块
MC ReadStatus功能块如图7-33所示,该功能块的作用是查看轴的状态。
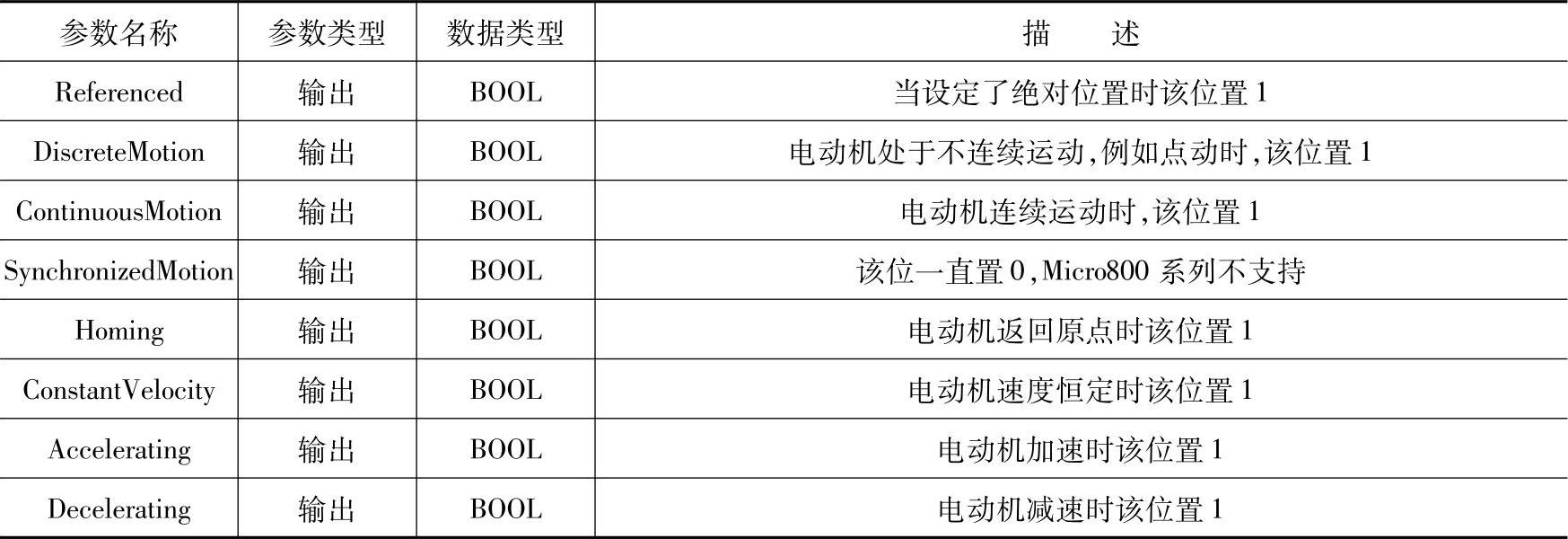
表7-16中列出了该模块的参数,重复的参数不再介绍。
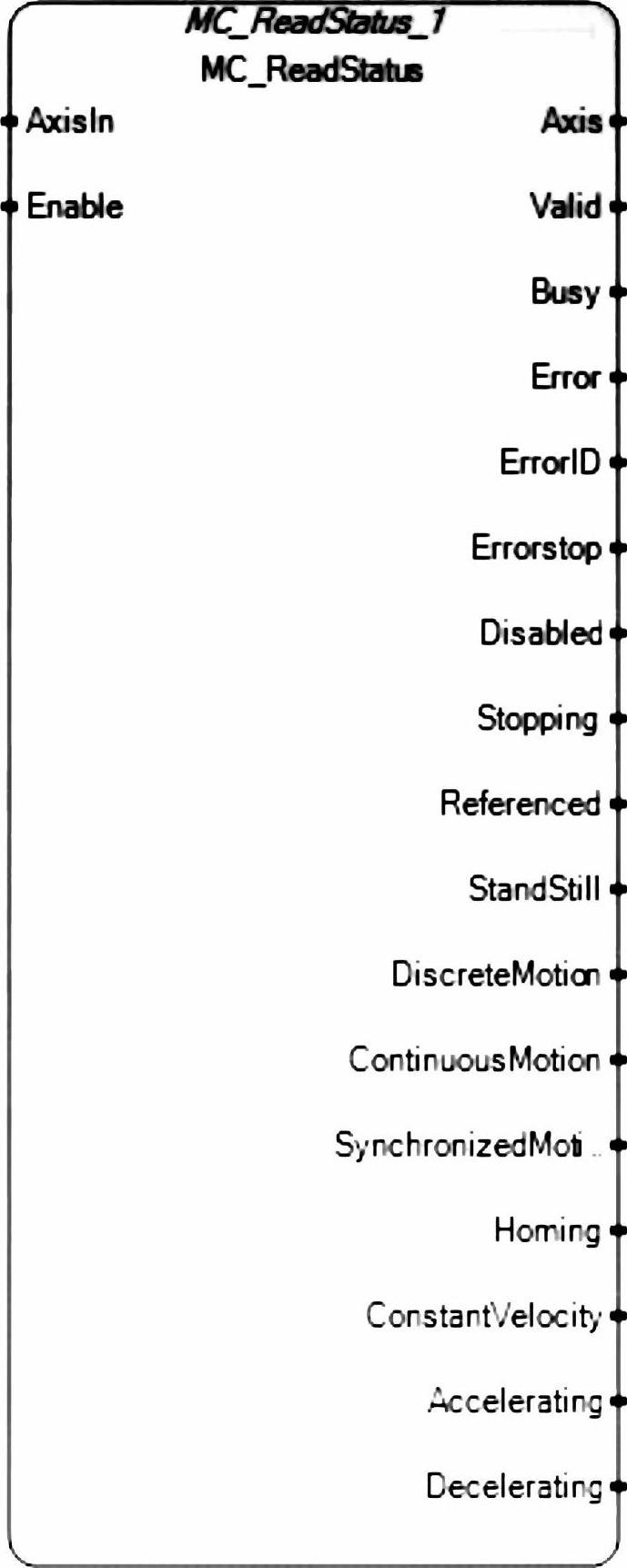
图7-33 MC ReadStatus功能块
表7-16 MC ReadStatus模块参数列表

(续)
轴的运动状态是时刻变化的,状态间的切换如图7-34所示。
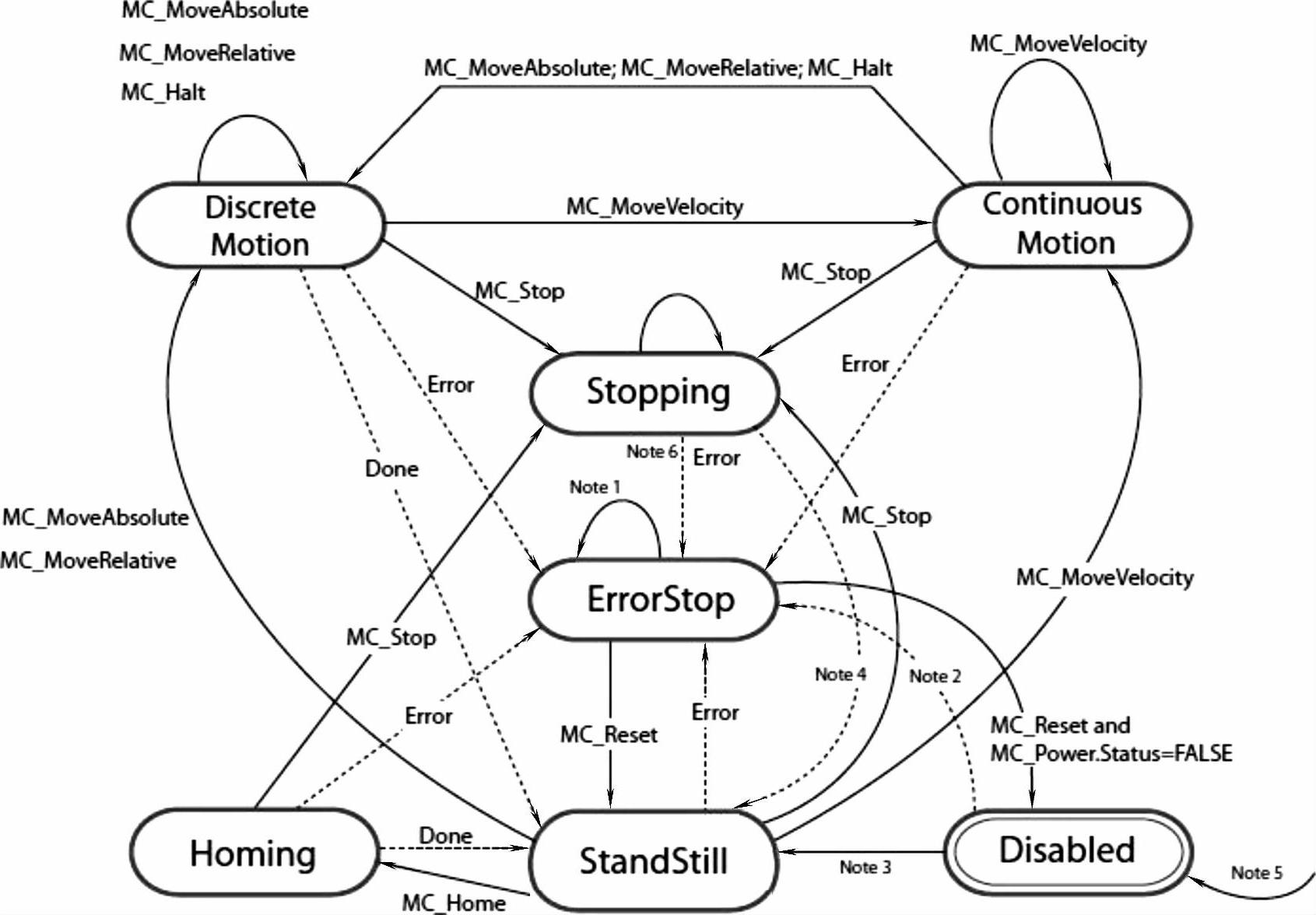
图7-34 轴状态切换
针对轴状态切换图,有以下几点需要注意:
1)Note1:在错误停止(ErrorStop)和正在停止(Stopping)状态下,除了MC Reset外所有的功能块都能调用,即使是这些功能块都没有执行。MC Reset块能够使电动机状态过渡到保持(Standstill)状态。如果当电动机正在停止(Stopping)状态时发生了一个错误,电动机状态将会过渡到因错误而停止(ErrorStop)状态。
2)Note2:Power.enable=TRUE时,有一个错误发生时触发图中Note2的转换。
3)Note3:Power.enable=TRUE时,没有错误发生时进行图中Note3的转换。
4)Note4:MC Stop.Done AND NOT MC Stop.Excute条件满足,触发Note4转换。
5)Note5:当MC Power执行时,但是Enable引脚为0时,轴会进入不可用(Disa-bled)状态。
6)Note6:当电动机处于正在停止状态时产生了一个错误,将会发生Note6的转换。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




