
1)在CCW工程中,双击Micro850,右键单击目录树“Motion”选项下的“New Axis”,点击“Add”,添加一个轴,如图7-18所示。

图7-18 添加轴
添加完轴,给轴命名为“Axis1”,这样在全局标签界面下就可以看到“Axis1”的组态信息了,组态信息如图7-19所示。
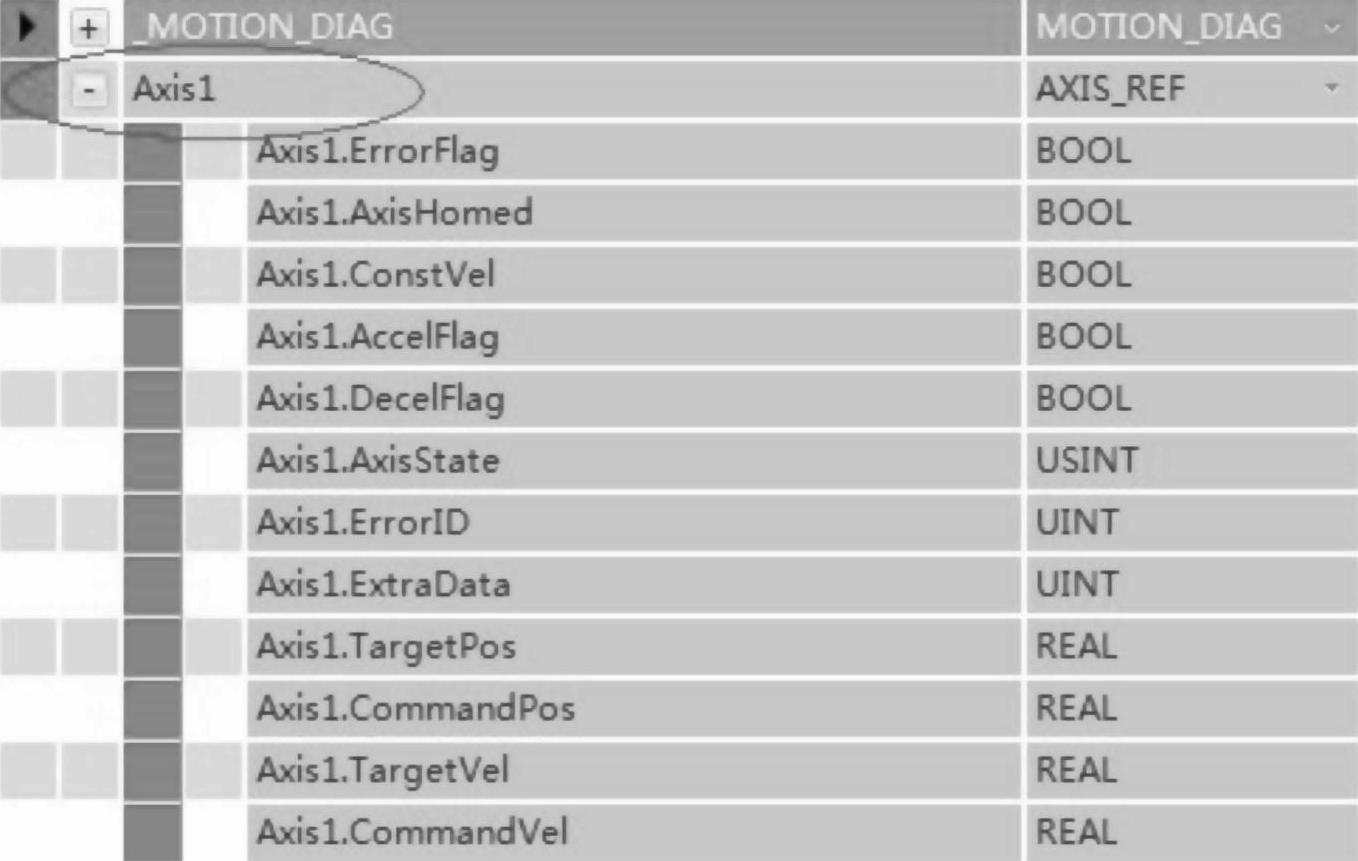
图7-19 全局变量中的轴组态信息
接下来需要对轴进行配置,点击“Axis1”进入配置界面,如图7-20所示。
2)配置“General”选项中的“PTO Channel”,“PTO Channel”是内部固定的,因为型号为2080-LC50-24QBB的控制器只支持两个轴,故“PTO Channel”只有2个选项,即“EM0”和“EM 1”,对于支持三轴的有3个选项。选择“EM 0”,“EM 0”是将O.00口作为脉冲输出口,O.03口作为方向输出口。“Drive Enable Output”即设置驱动使能口,这里设置的为O.06口,该口控制电动机驱动的使能。“Drive Ready Input”,即驱动就绪口,该口置1表示高速控制器驱动已经准备好接受脉冲,该口设置为DI.09。
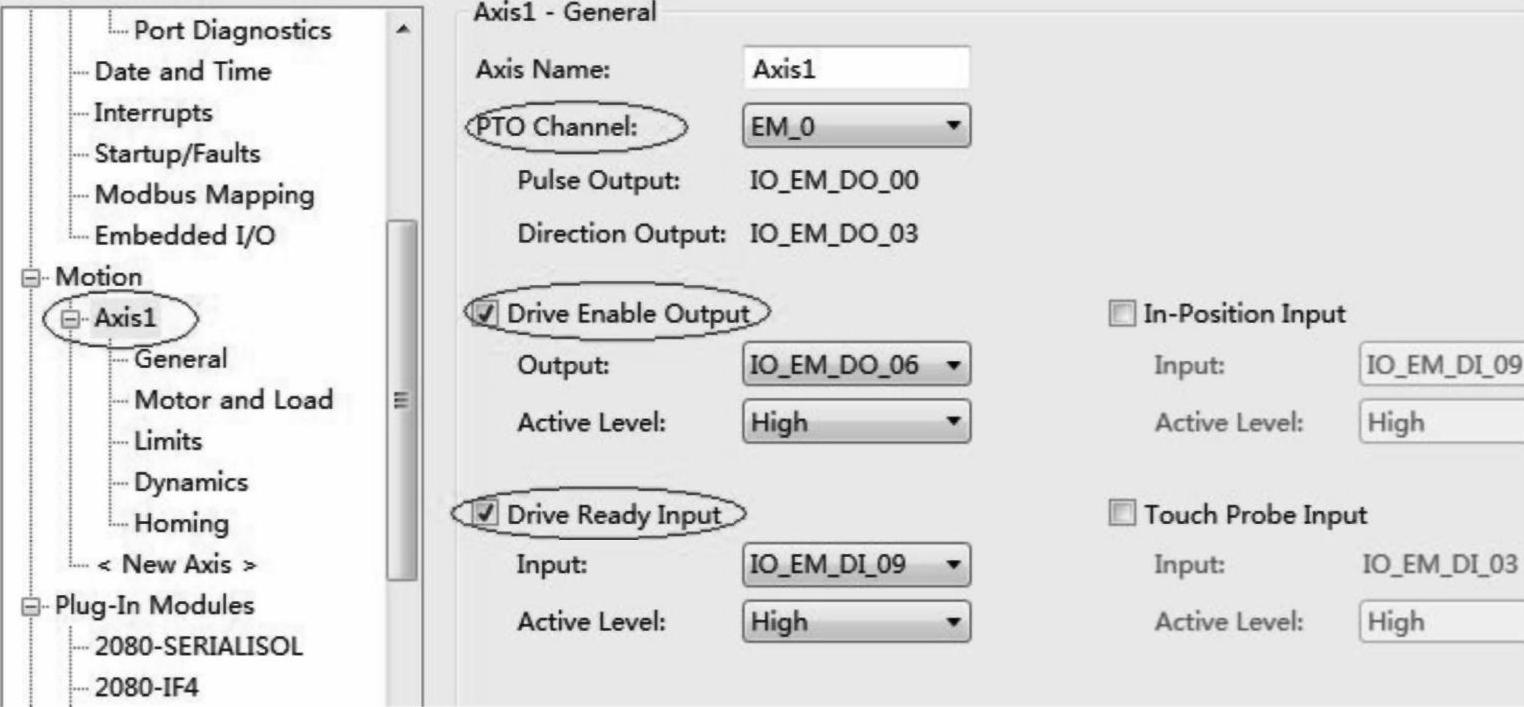
图7-20 PTO配置界面
值得注意的是:①这里“Drive Enable Output”驱动使能口除了要在控制器中配置成O.06口以外,还需要通过面板设置Pr-0.10号参数,需将其设置成为与控制器O.06对应的端口;②“Drive Ready Input”的设置需要先通过面板设置Pr-0.24号参数,将Output1-3设定为Ready,再将该输出接到控制器的DI.09上。或通过Ultraware设置驱动器Out-put1-3,再将置成Ready信号的输出接到DI.09上。Ultraware设置如图7-21所示。
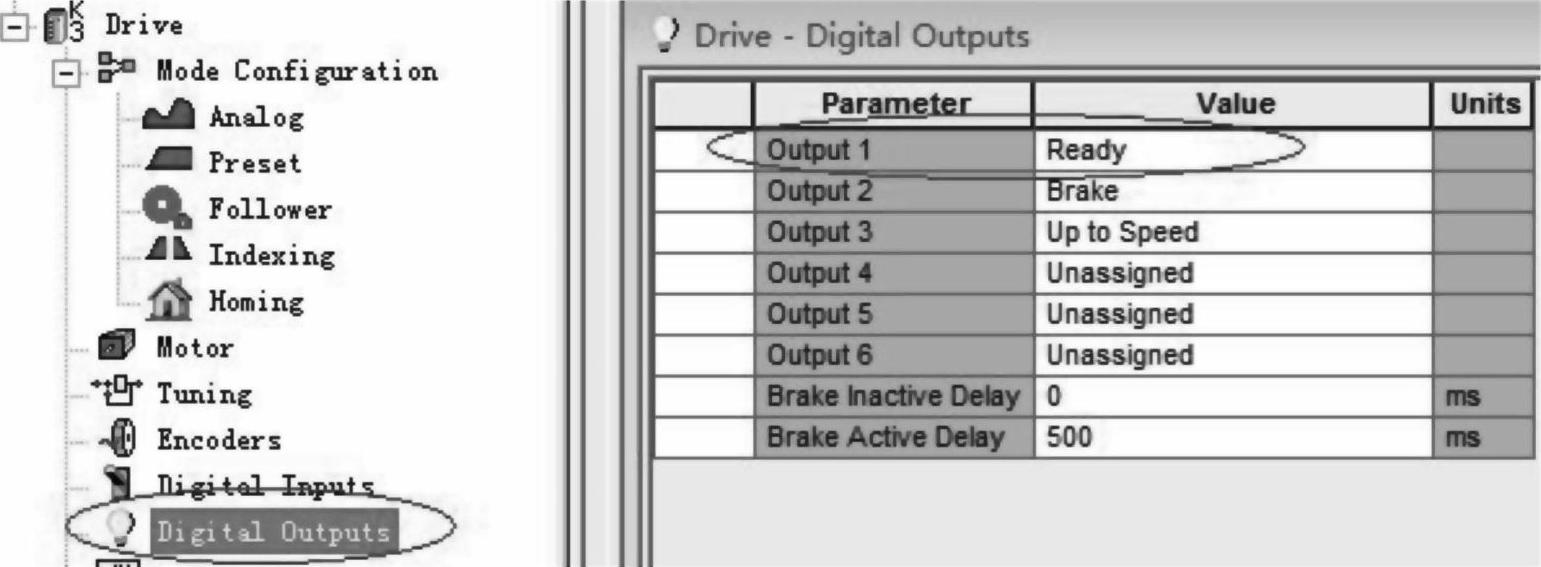
图7-21 使用Ultraware设置驱动器Output
3)配置“Motor and Load”选项,“User Defined Unit”的配置非常重要,因为这一配置直接决定了以后的速度和位置的具体值。这里定义的是mm,即在设定位置的时候,如果设定的1000,指的就是1000mm。“Motor Revolution”中设置脉冲对应的用户定义的距离。“Pulses per Revolution”指的是200个脉冲一个循环,“Travel per Revolution”指的是每个循环为多少用户定义单位,这里定义的是mm,可以理解为每秒200个脉冲运动1mm。“Motor and Load”配置如图7-22所示。(www.daowen.com)
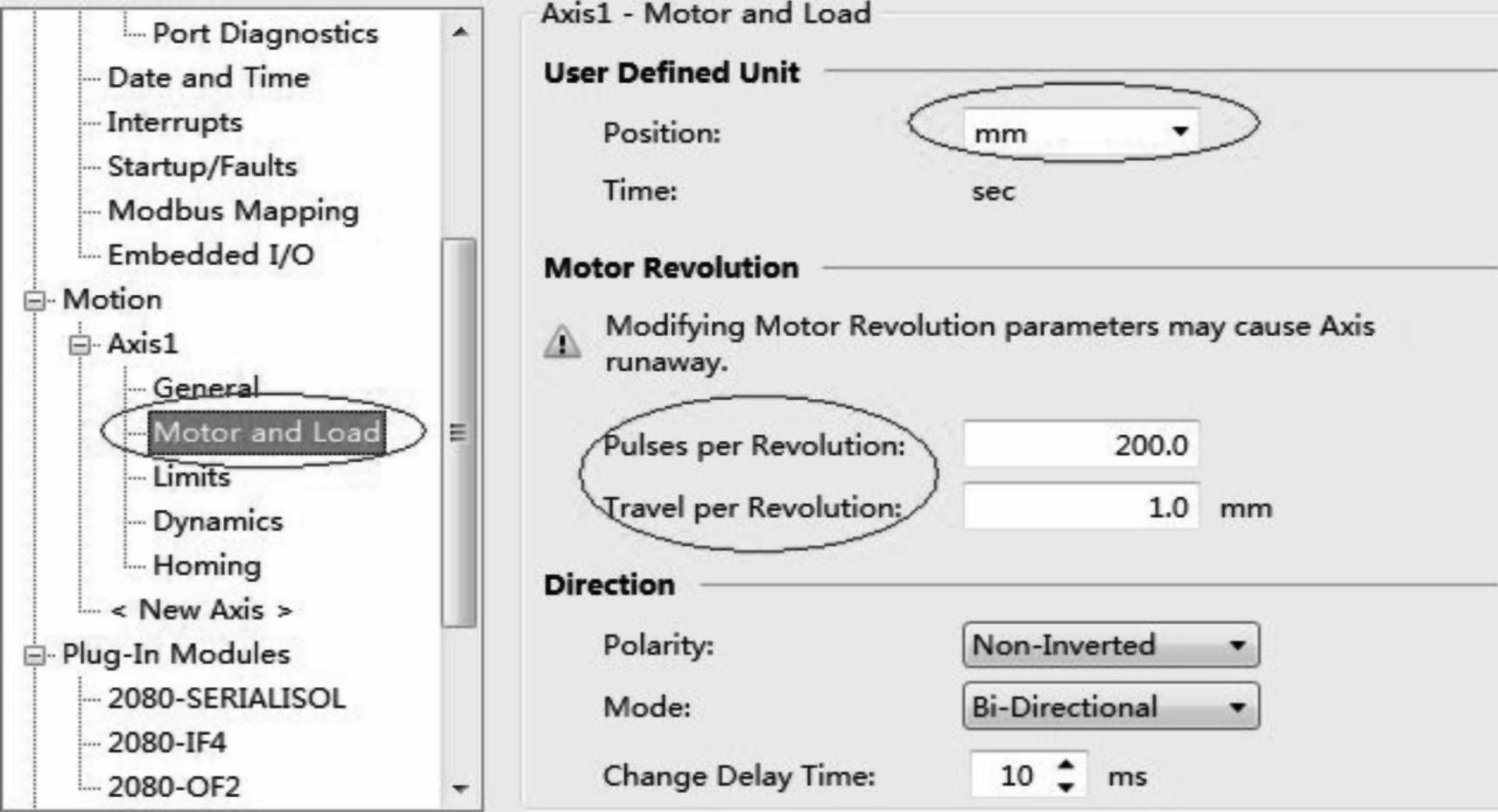
图7-22 “Motor and Load”配置
4)配置“Limits”,选项中可以配置低硬限位和高硬限位,该限位信号可以用硬件给出,这里设置为DI.00口和DI.01口。当电动机到达设定位置时,硬件限位器触发,PTO模块接收到电动机到达低/高硬件限位的信号后将控制电动机停止。该选项中除了可以设置硬限位还可以设置软限位,可以设置每个限位的用户定义距离,当软件检测脉冲个数对应的用户定义距离到达时触发软件限位,会促使电动机停止运行。
具体的配置如图7-23所示。
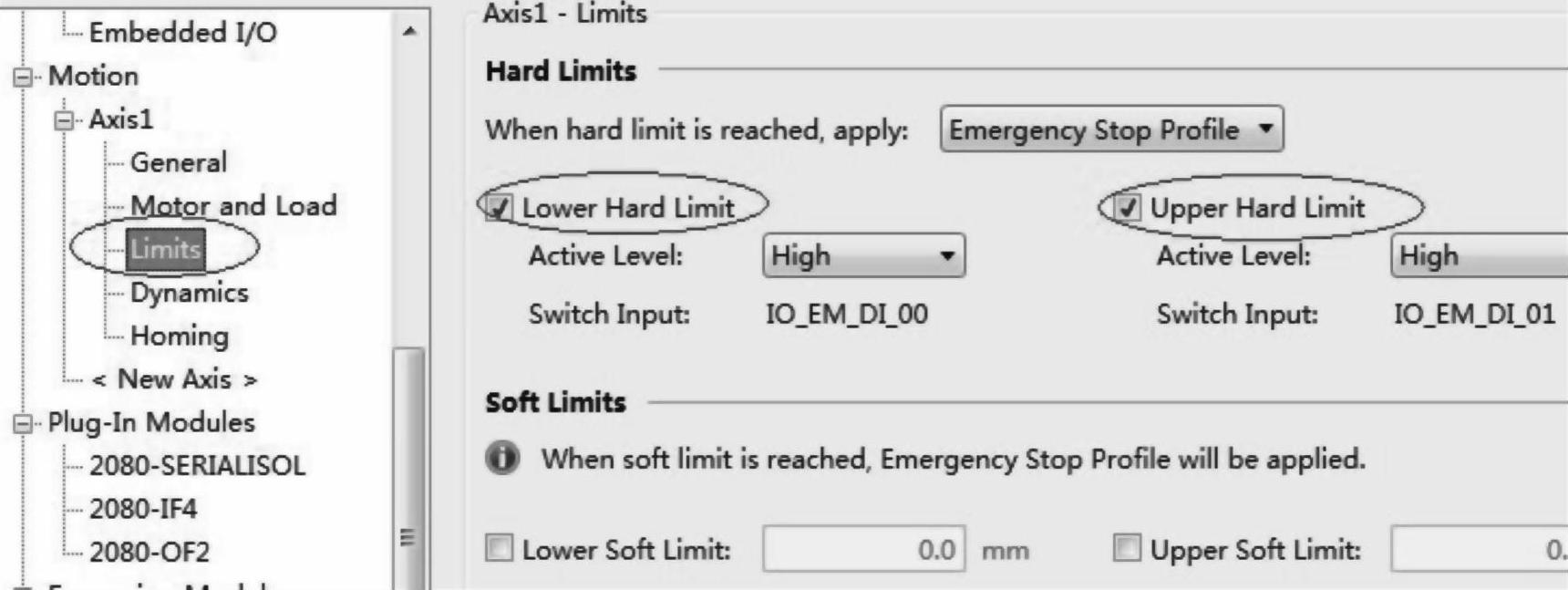
图7-23 “Limits”配置
5)配置“Dynamics”,该选项中可以配置起动/停止速度、最大速度、加速度等,配置如图7-24所示。
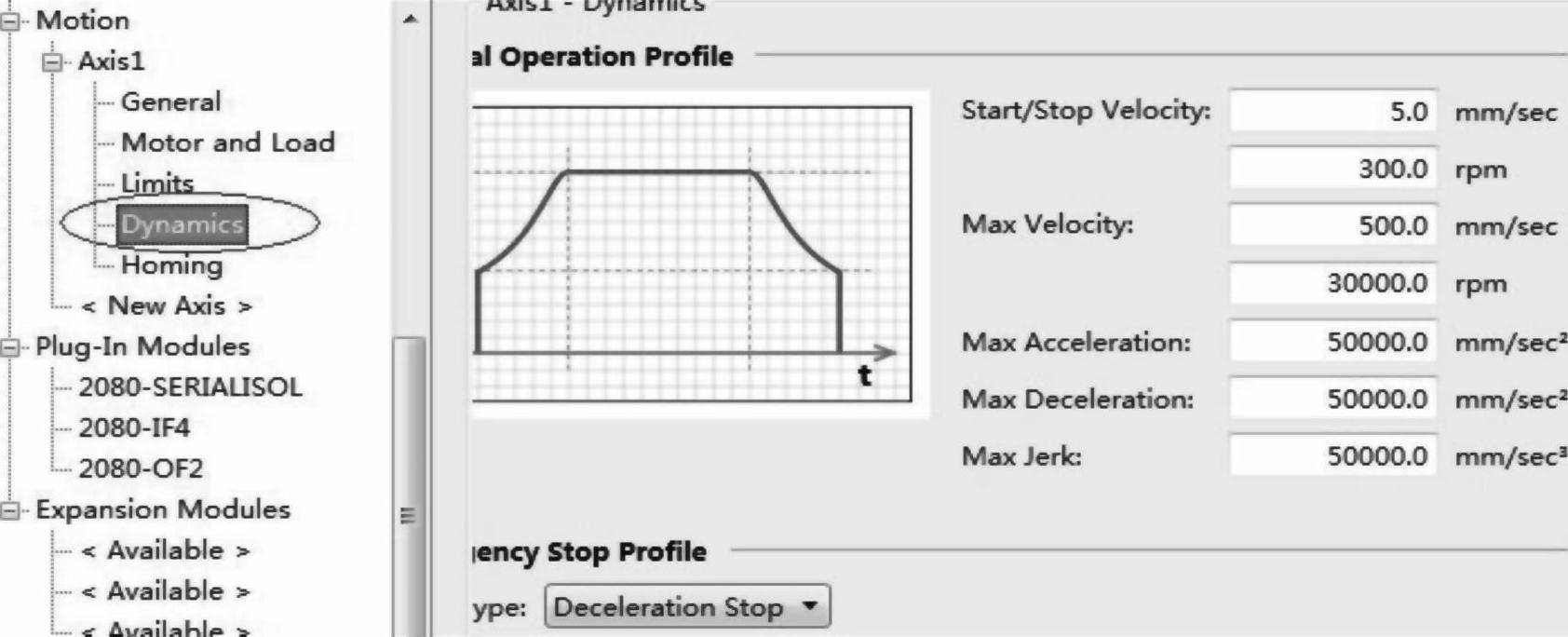
图7-24 “Dynamics”配置
6)配置“Homing”,该选项中可以配置索引模式下的各个归零属性,比如归零方向、归零速度、归零加速度、归零偏移量等,配置如图7-25所示。
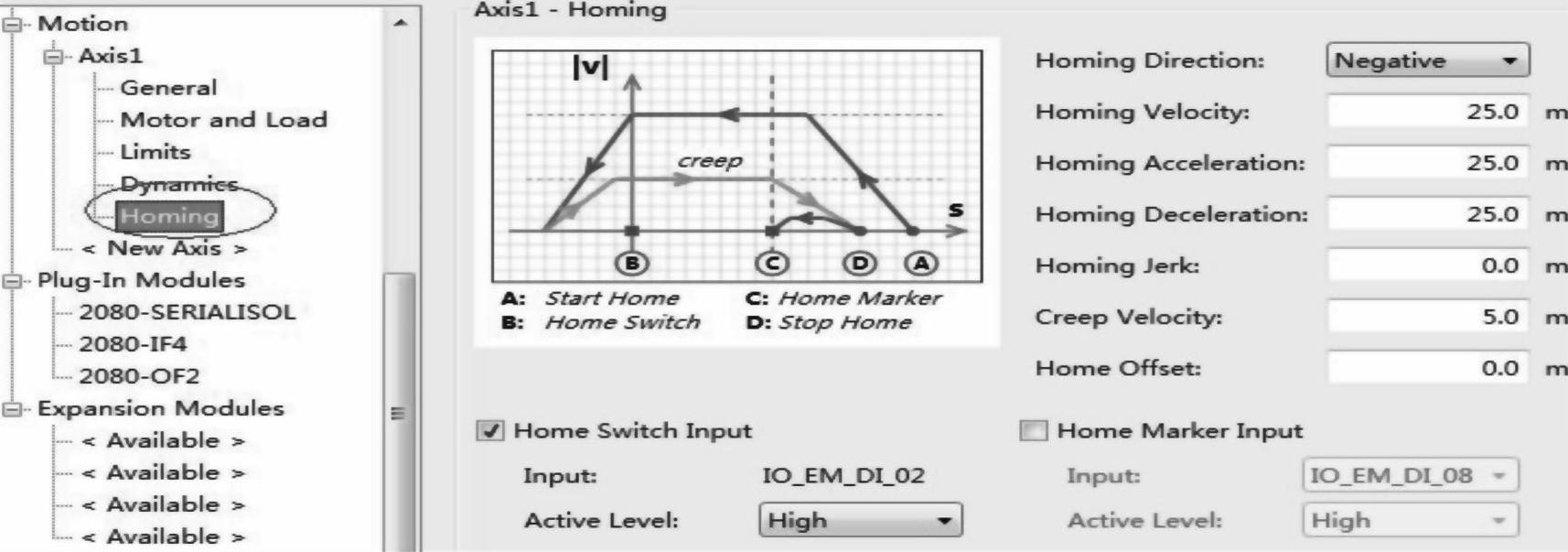
图7-25 “Homing”配置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






