若想用外部I/O或者通信来控制Kinetix 3驱动器需要具备两个条件:首先是需要正确地完成硬件的接线;然后需要对Kinetix 3驱动器进行正确的参数配置。Kinetix 3驱动器参数有三种配置方式,第一种为通过驱动器面板进行参数配置,第二种为使用Ultraware对驱动器进行配置,第三种为使用Kinetix 3上的通信口Comm0A或者Comm0B,通过Modbus RTU对Kinetix 3进行参数配置。这里介绍前两种配置方式,第三种配置方式将在后面进行介绍。
在介绍参数配置之前,需要先了解Kinetix 3驱动器的几种工作模式。Kinetix 3一共有12种(其中一种保留,供以后使用)工作模式,但归结起来需要掌握5种模式,这5种模式为Follower(跟随)、Analog Velocity Input(模拟量速度输入)、Analog Current Input(模拟量电流输入)、Preset Velocity(预置速度)和Indexing(索引)。
Follower(跟随)模式是使用Micro850的PTO高速脉冲口发送高速脉冲给Kinetix 3驱动器,使得电动机跟随脉冲运动,跟随速度与脉冲频率之间的具体的关系可以通过PTO口进行设置,这个将在之后的章节进行介绍。
Analog Velocity Input(模拟量速度输入)模式是使用外部输入电压,根据电压/转速比得到具体速度,从而控制电动机以特定的速度运动,其中电压/转速比可以进行设置。
Analog Current Input(模拟量电流输入)模式是使用外部输入电流,根据电流/电压比得到电压,再根据电压/转速比得到具体速度,其中电流/电压比可以设定。
Preset Velocity(预置速度)模式是预置1~7个设定好的速度,并配置驱动器INPUT口,然后通过硬件或者软件切换预置速度进行速度控制。
Indexing(索引)模式可以事先设置好0~63个速度值,然后根据需要对这些速度值进行排序。该模式启动后,驱动器将按顺序逐个执行事先设定好的速度值。
其他模式还有SF、CF、CS、PF、PS、PC模式,这些模式是上述5种模式的两两组合。举个例子,例如SF模式,即主运行模式为Analog Velocity Input(模拟量速度输入)模式,当启动旁路模式后,会切换到Follower(跟随)模式。其他模式类似。具体可以参考罗克韦尔自动化官方手册2071-r m001,这里不再赘述。
1.Kinetix 3驱动器面板参数设置
如果手边没有可以连接计算机的线,无法对驱动器进行参数配置,那么可以通过驱动器面板对驱动器进行参数配置。操作面板如图7-7所示。
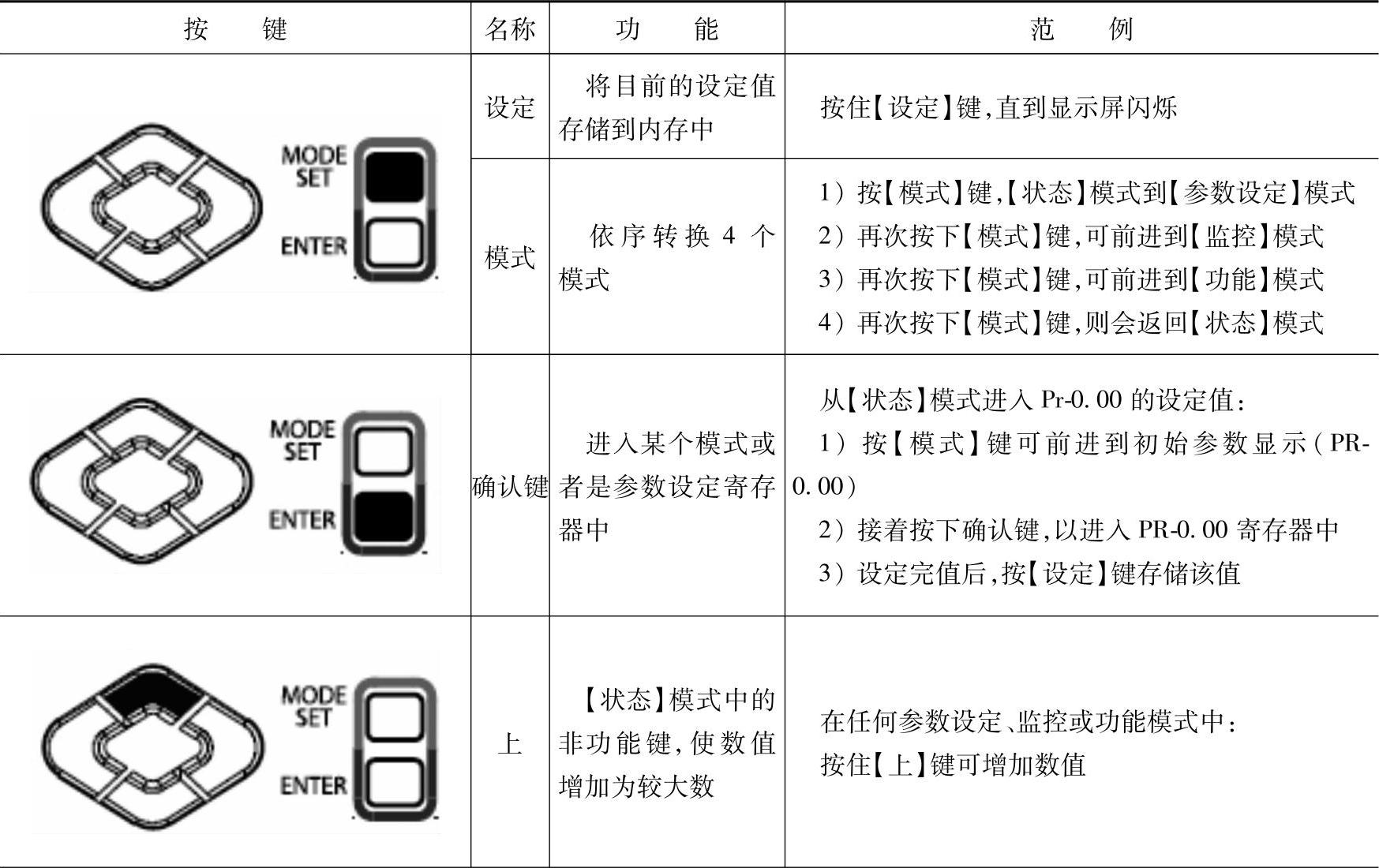
其中,1是7段数码管,2为方向按钮,3为模式/设定按键,4为确认键。7段状态指示灯可显示状态、参数、函数指令,并可提供驱动器监控功能。操作员可通过模式/设定以及确认键来存取驱动器的各项功能,而方向键(上下左右)可用来编辑驱动器的功能设定。这些按键可供操作员监控及变更驱动器的各个参数。表7-5概述了模式/设定、确认及方向键的功能。
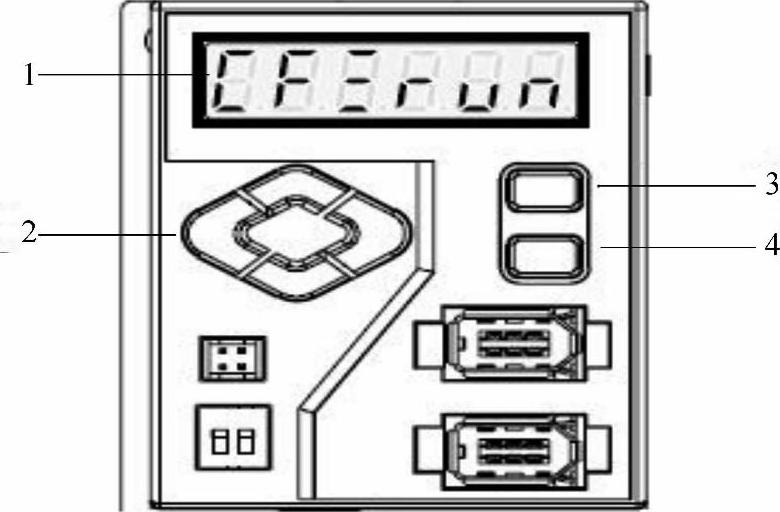
图7-7 操作面板
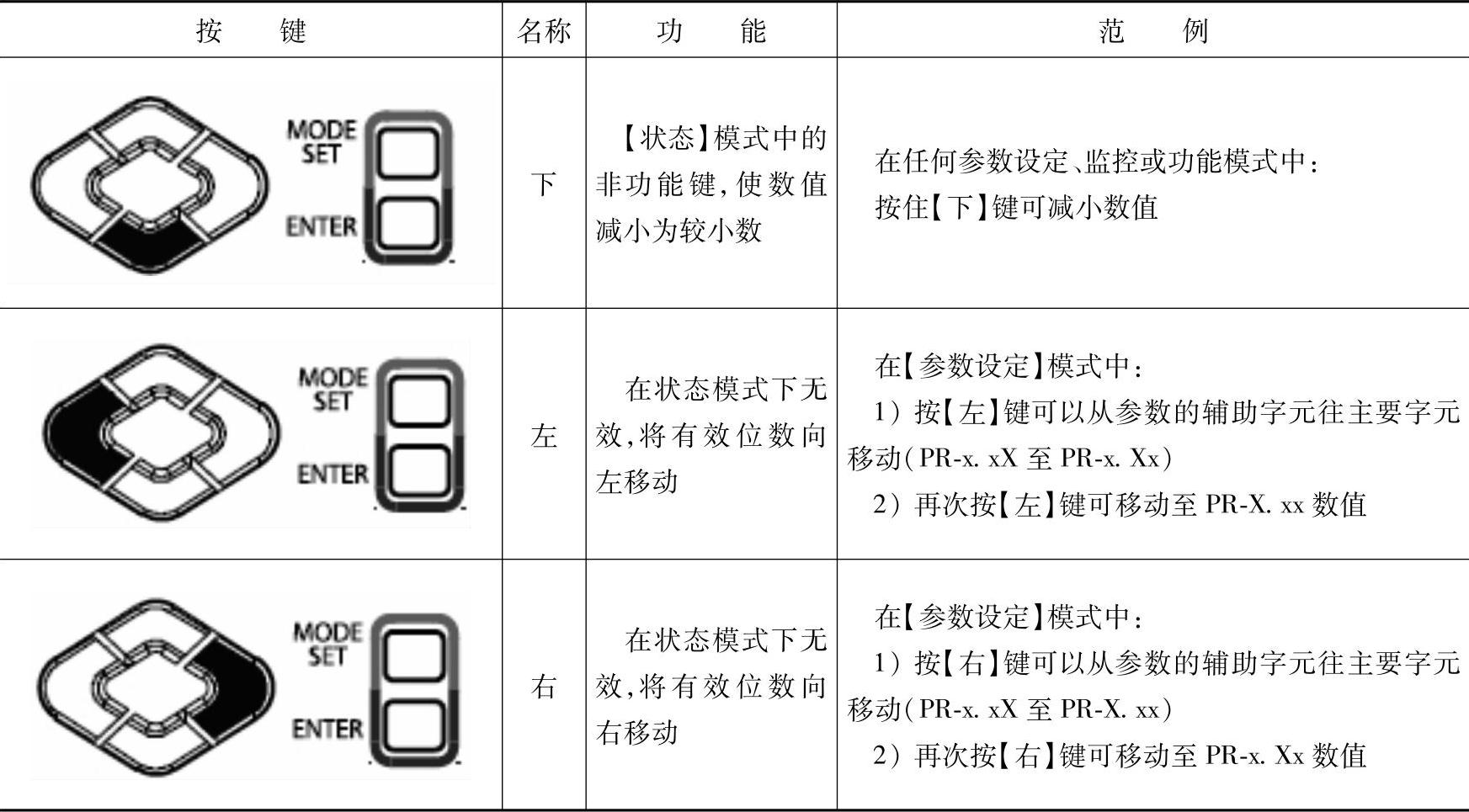
表7-5 面板操作按键功能
(续)
 (www.daowen.com)
(www.daowen.com)
2.Ultraware软件配置Kinetix 3参数
使用面板控制不仅比较麻烦,而且需要经常查看手册才能知道驱动器中每个参数的参数号,改动起来很费时,而且往往容易忽略掉其中的某个参数设置,从而影响系统运行。罗克韦尔自动化公司提供了Ultraware软件专门对Kinetix 3进行参数配置。该软件直观的操作界面使得Kinetix 3的参数配置起来非常简单。
Kinetix 3驱动器上提供了Comm0A口,可以使用2090-CCMPCDS-23AAxx线,连接Ki-netix 3驱动器跟计算机的RS-232串口,然后使用Ultraware对驱动器进行配置。连接线缆如图7-8所示。

图7-8 连接线缆
在驱动器上电后,首先需要使用面板设置RS-232的通信协议,将其中的PR-0.09号参数设置为:波特率56000bit/s,8个数据位,无校验,1个停止位,使用ASCII协议,以及使用RS-232通信。设置完这些信息后将电缆接上,打开Ultraware软件,建立新文档,软件会扫描线上的驱动器。扫描后可以看到如图7-9所示的目录树,点击“+”,可以展开驱动器的模式配置。
模式配置(Mode Configuration)下方有Analog(模拟量输入模式)、Preset(预置速度)、Follower(跟随)、Indexing(索引)模式的相关设置。
Motor(电动机)选项可以监控电动机的状态。
Tuning(微调)选项可以调节速度与位置调节器的增益,监控速度、位置及电流回路的状态。开启各对话框后,可在其中执行自动微调、手动位置微调、手动速度微调等指令。
Encoders(编码器)选项可以设置电动机的编码器。
Digital Inputs(数字量输入)可以设置驱动器各个数字量输入功能,例如可以设置Input1为电动机的起动按钮,Input2为电动机的方向按钮,Input3为电动机的停止按钮等。也可以监控各个数字量的输入情况。
Digital Outputs(数字量输出)可以设置驱动器各个数字量的输出功能。也可以监控各个数字量的输出情况。
Analog Outputs(模拟量输出)可以将电动机的速度折算成电压或者电流输出。可以设置其中的电压/转速比或者电流/转速比来控制电压/电流输出。
Ultraware中一些选项的具体参数将在后面的实例中列出来。
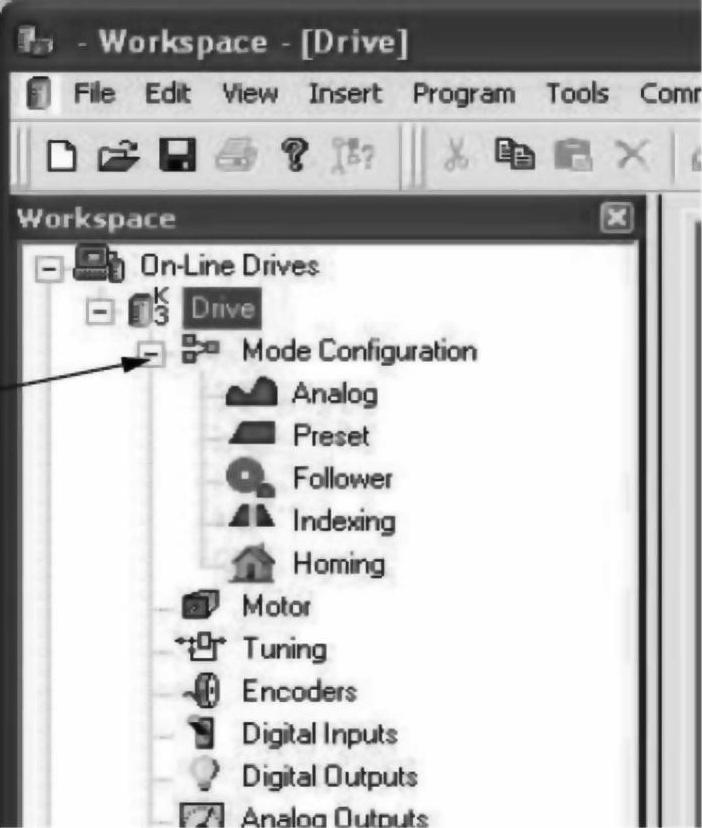
图7-9 Ultraware目录树
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





