【摘要】:图7-1 位置控制系统结构控制器可以通过两种方式来控制K3驱动器:第一种是在K3驱动器的模式设置为Follo-wer(跟随)模式时,通过使用控制器的一个本地输出点利用控制器中的PTO向驱动器中脉冲接收端口发送一定频率的脉冲,根据脉冲的频率和个数来精确定位电动机运动的位置;第二种方式是通过Micro850的嵌入式的串口通信模块2080-SERIALISOL,此通信模块即支持RS-485通信协议也支持RS-232通信协议。表7-1 位置控制系统单元组件
以Micro850为核心的位置控制系统采用PanelView Component 600作为人机界面并通过网线连接到控制器中,用以太网与控制器进行通信,通过控制K3(Kinetix 3)驱动器控制电动机运行。位置控制系统结构如图7-1所示。
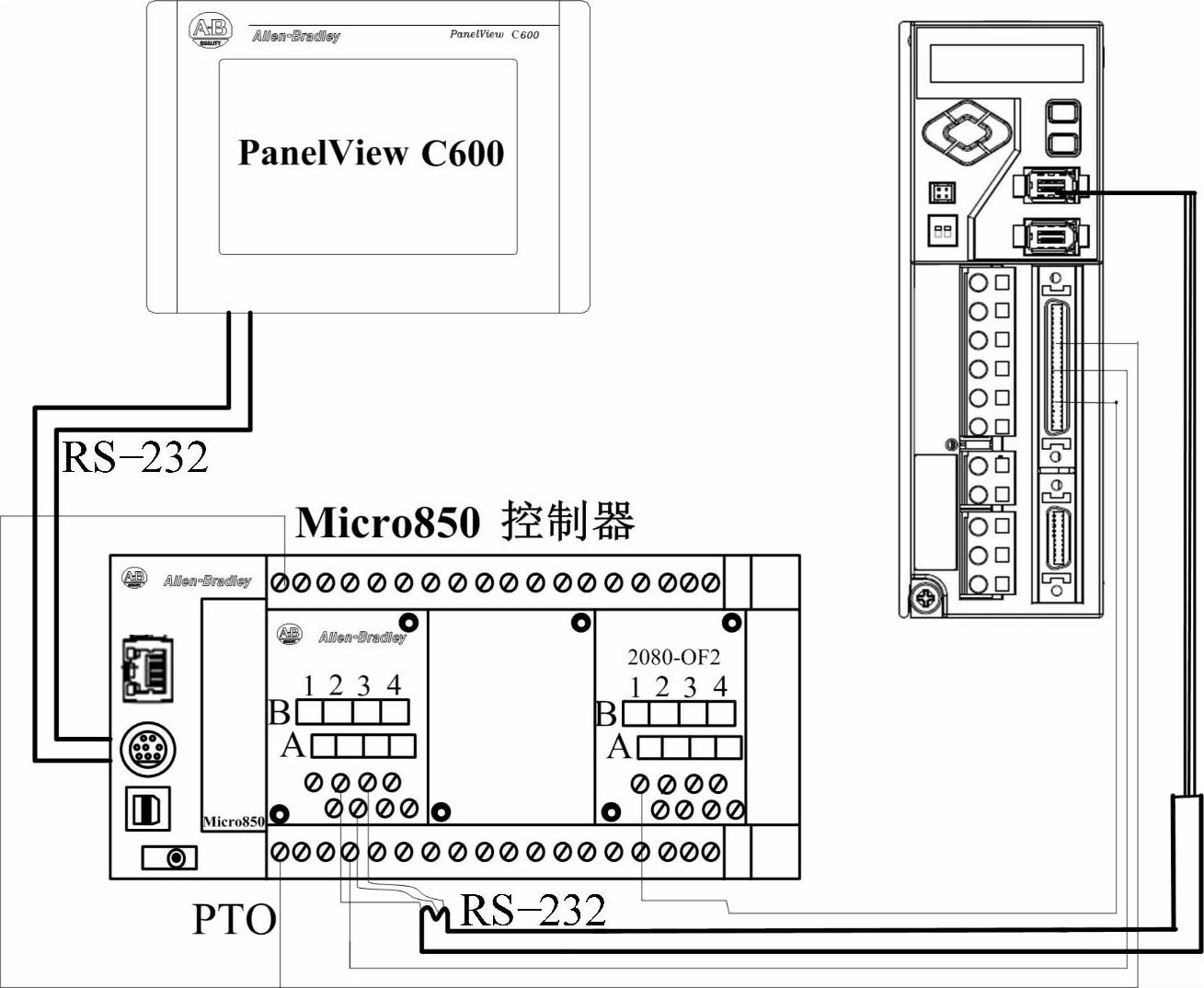
图7-1 位置控制系统结构
控制器可以通过两种方式来控制K3驱动器:第一种是在K3驱动器的模式设置为Follo-wer(跟随)模式时,通过使用控制器的一个本地输出点(本次实验使用的是O.00口)利用控制器中的PTO(Pulse Train Outputs)向驱动器中脉冲接收端口发送一定频率的脉冲,根据脉冲的频率和个数来精确定位电动机运动的位置;第二种方式是通过Micro850的嵌入式的串口通信模块2080-SERIALISOL,此通信模块即支持RS-485通信协议也支持RS-232通信协议。本节将模块配置成RS-232通信口,并通过Modbus RTU协议或者ASCII协议配置K3驱动器系统参数,从而控制电动机的运行。
本章设计的位置控制系统中采用了HSC(High-Speed Counter)高速计数器来测量PTO口发出的实际脉冲个数,作为控制系统的反馈信号(本次实验使用的是本地输入点I.00),以此来实现位置的精确定位。(www.daowen.com)
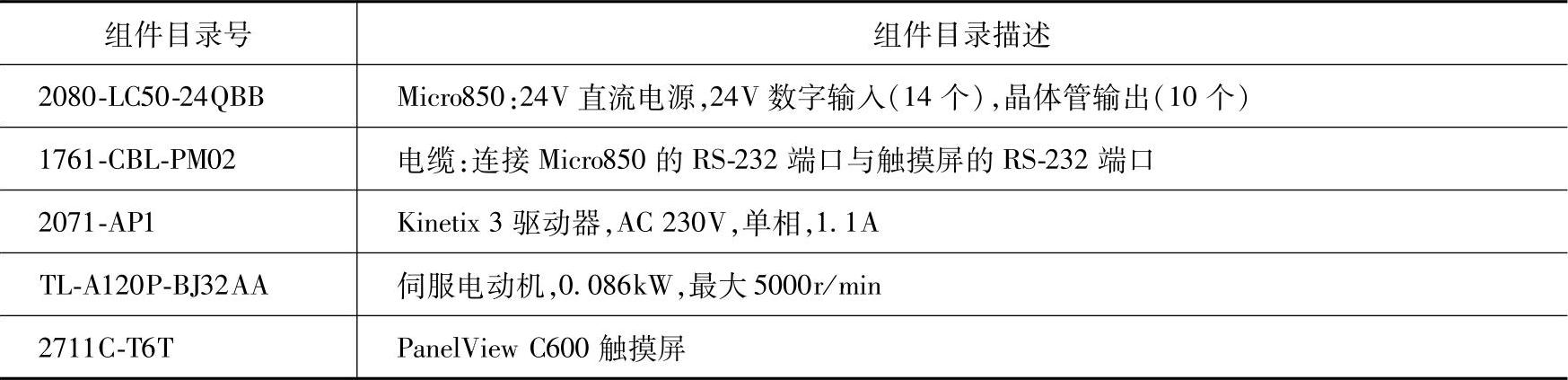
本次控制系统的单元组件见表7-1。
表7-1 位置控制系统单元组件
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关循序渐进Micro800控制系统的文章





