高速输出有PWM模式和运动轴模式,对于较复杂的运动控制显然用运动轴模式控制更加便利。以下将具体介绍这种方法。
(1)激活“运动控制向导”
打开STEP 7软件,在主菜单“工具”中单击“运动”按钮,弹出装置选择界面,如图10-11所示。

图10-11 激活“位置控制向导”
(2)选择需要配置的轴
CPU ST40系列PLC内部有三个轴可以配置,本例选择“轴0”即可,如图10-12所示,再单击“下一步”按钮。
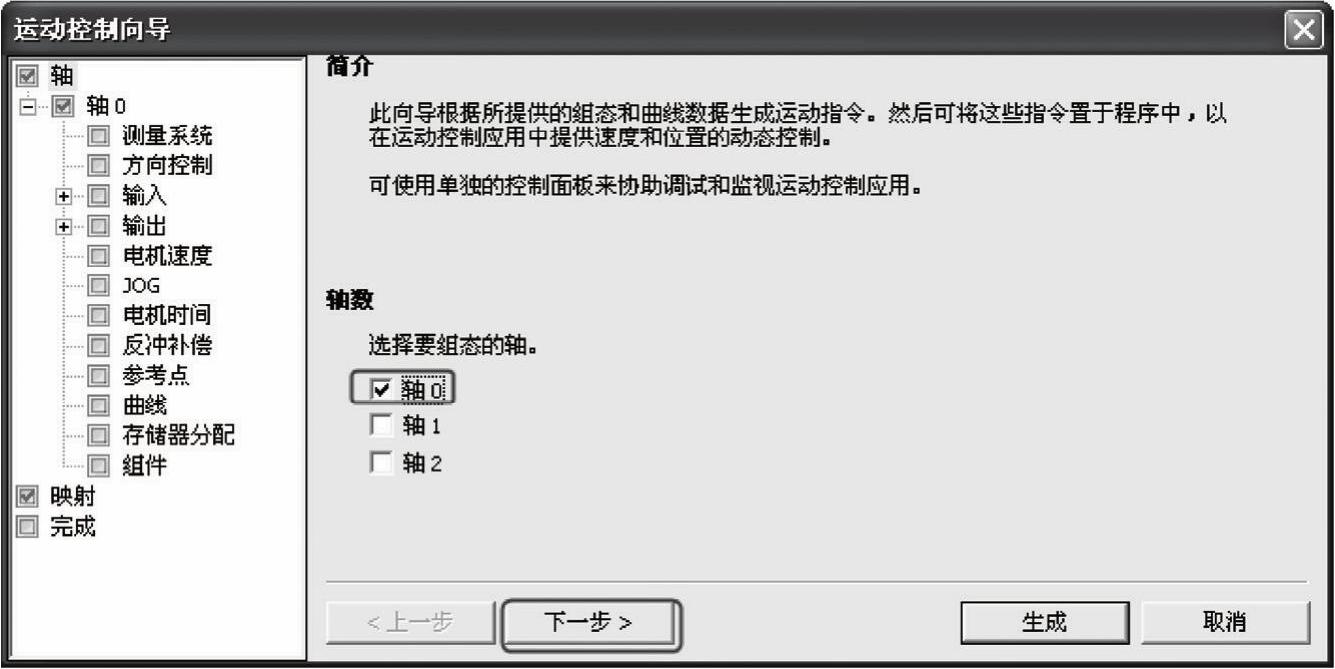
图10-12 选择需要配置的轴
(3)为所选择的轴命名
为所选择的轴命名,本例为默认的“轴0”,再单击“下一步”按钮,如图10-13所示。
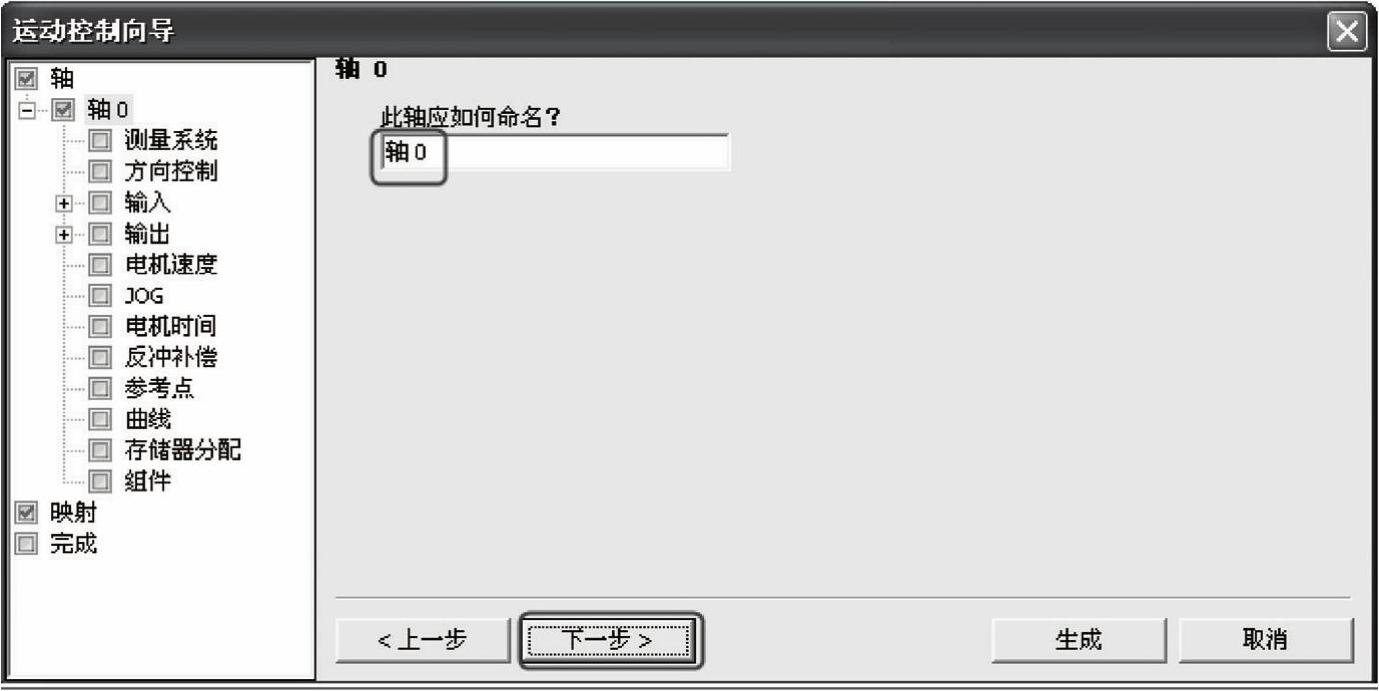
图10-13 为所选择的轴命名
(4)输入系统的测量系统
在“选择测量系统”选项选择“工程单位”。由于步进电动机的步距角为1.8°,电动机转一圈需要200个脉冲,所以“电机一次旋转所需的脉冲”为“200”;“测量的基本单位”设为“mm”;“电机一次旋转产生多少‘mm’运动”为“10.0000”;这些参数与实际的机械结构有关,再单击“下一步”按钮,如图10-14所示。
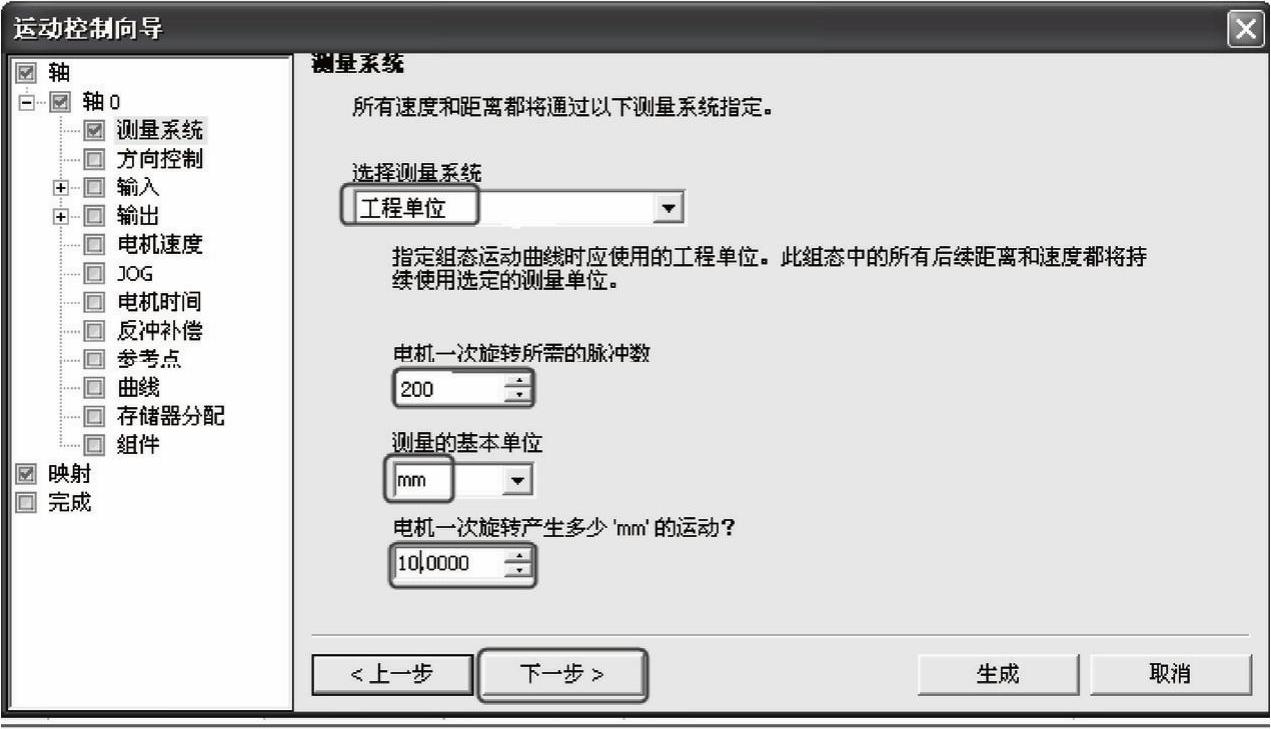
图10-14 输入系统的测量系统
(5)设置脉冲方向输出
设置有几路脉冲输出,其中有单相(1个输出)、双向(2个输出)和正交(2个输出)三个选项,本例选择“单相(1个输出)”;再单击“下一步”按钮,如图10-15所示。
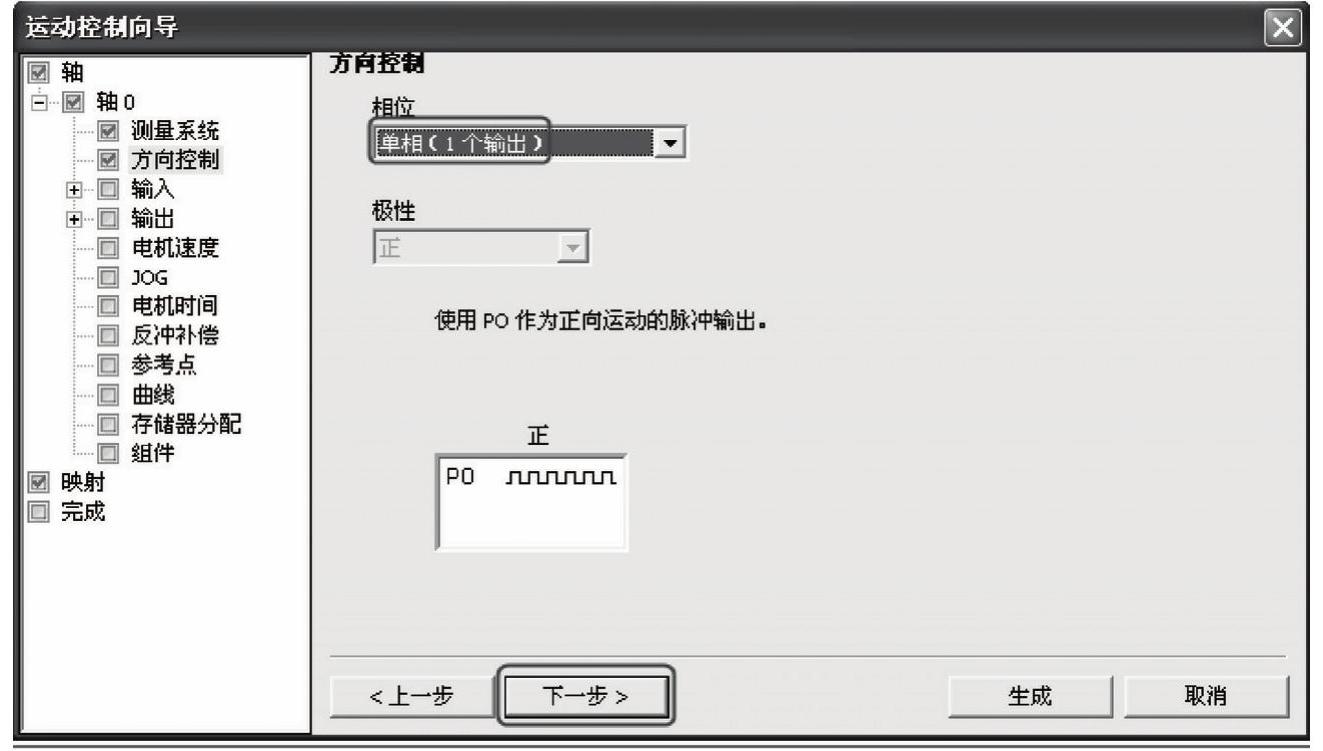
图10-15 设置脉冲方向输出
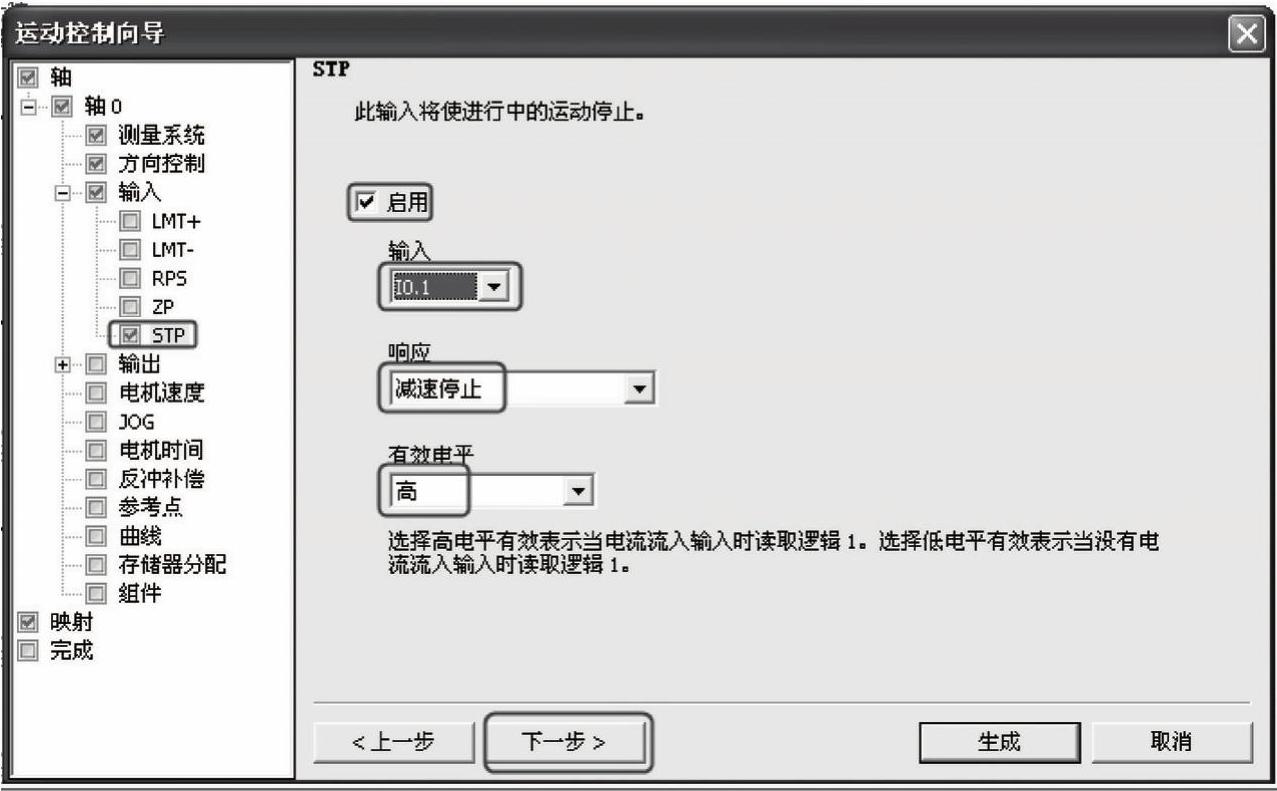
6)分配输入点
本例中并不用到LMT+(正限位输入点)、LMT-(负限位输入点)、RPS(参考点输入点)和ZP(零脉冲输入点),所以可以不设置。直接选中“STP”(停止输入点),选择“启用”,停止输入点为“I0.1”,指定相应输入点有效时的响应方式为“减速停止”,指定输入信号有效电平为“高”电平有效。再单击“下一步”按钮,如图10-16所示。
 (www.daowen.com)
(www.daowen.com)
图10-16 分配输入点
(7)指定电机速度
MAX_SPEED:定义电机运动的最大速度。
SS_SPEED:根据定义的最大速度,在运动曲线中可以指定的最小速度。如果SS_SPEED数值过高,电动机可能在起动时失步,并且在尝试停止时,负载可能使电动机不能立即停止而多行走一段。停止速度也为SS_SPEED
设置如图10-17所示,在“1”、“2”和“3”处输入最大速度、最小速度、起动和停止速度,再单击“下一步”按钮。
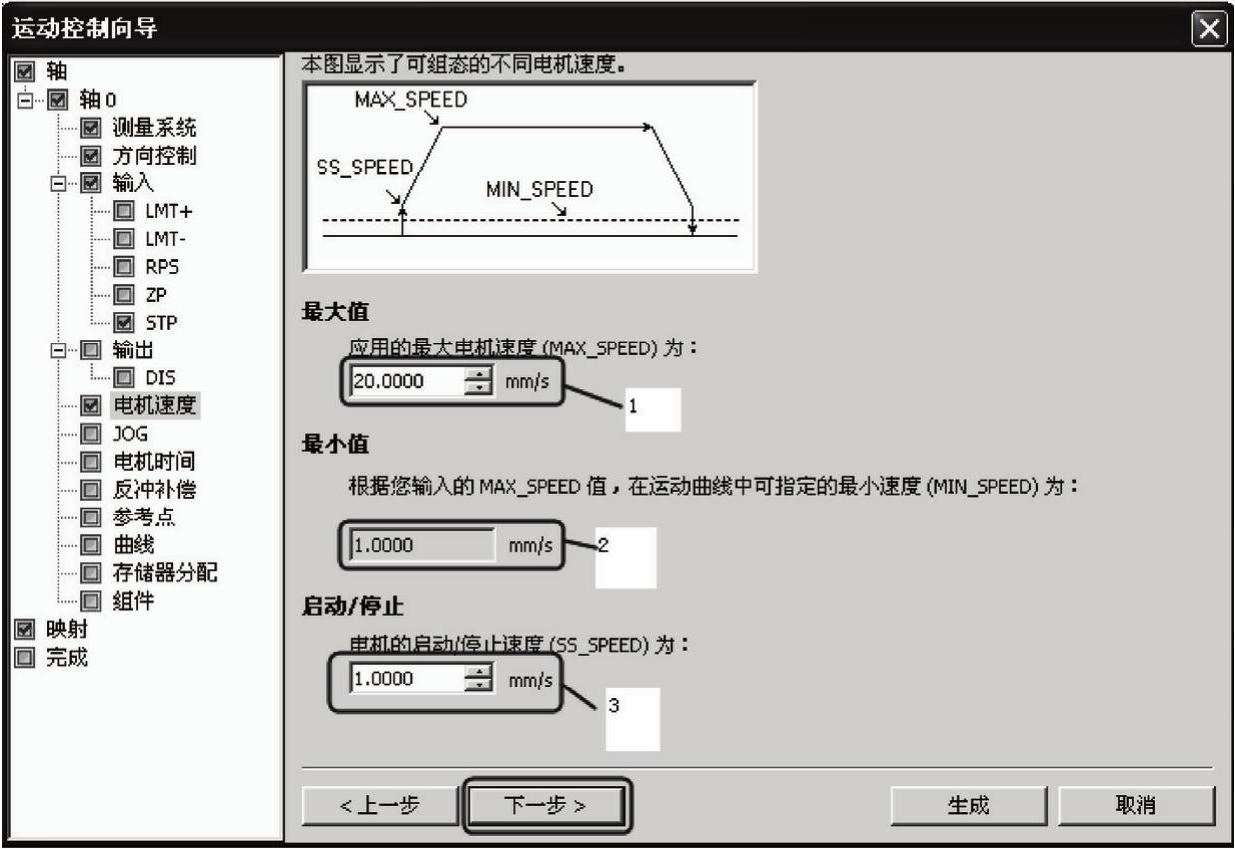
图10-17 指定电动机速度
(8)设置加速和减速时间
ACCEL_TIME(加速时间):电动机从SS_SPEED加速至MAX_SPEED所需要的时间,默认值=1000ms(1s),本例选默认值,如图10-18所示的“1”处。
DECEL_TIME(减速时间):电动机从MAX_SPEED减速至SS_SPEED所需要的时间,默认值=1000ms(1s),本例选默认值,如图10-18所示的“2”处,再单击“下一步”按钮。
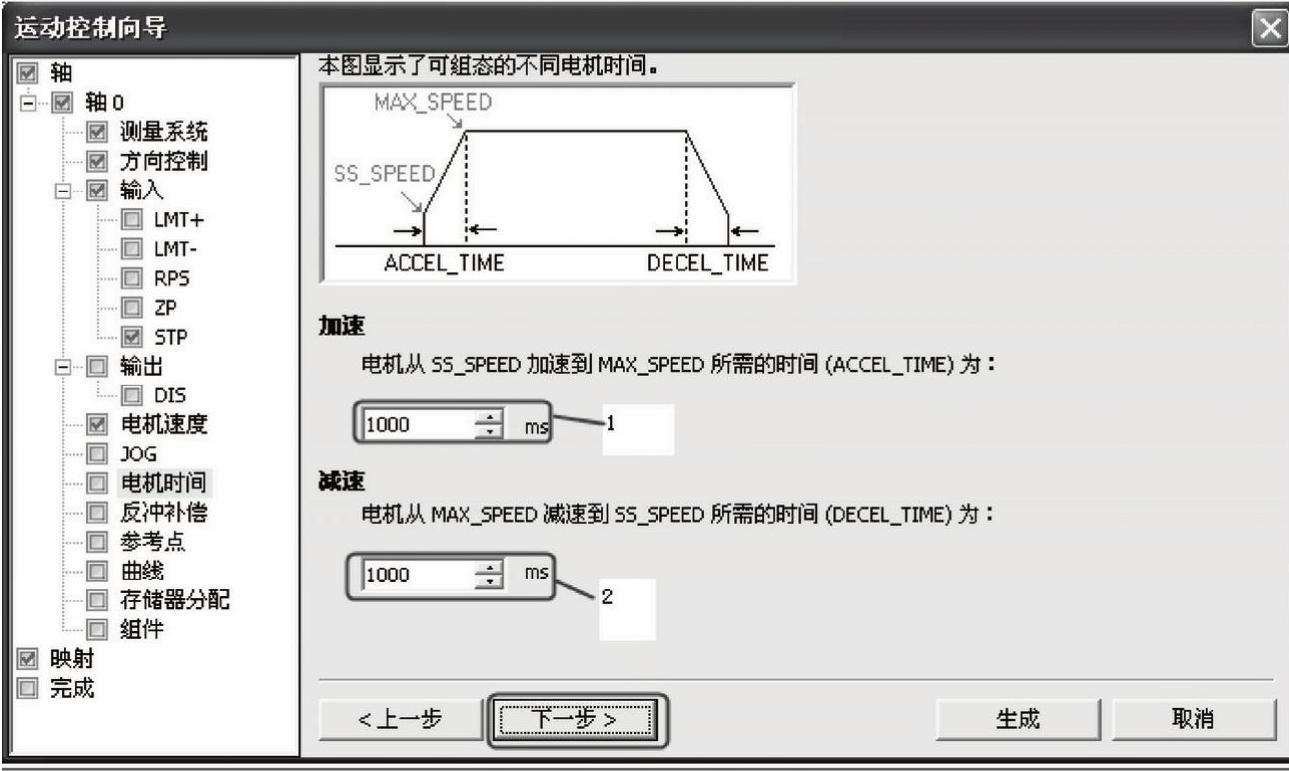
图10-18 设置加速和减速时间
(9)为配置分配存储区
指令向导在V内存中以受保护的数据块页形式生成子程序,在编写程序时不能使用PTO向导已经使用的地址,此地址段可以系统推荐,也可以人为分配,人为分配的好处可以避开读者习惯使用的地址段。为配置分配存储区的V内存地址如图10-19所示,本例设置为“VB0~VB92”,再单击“下一步”按钮。
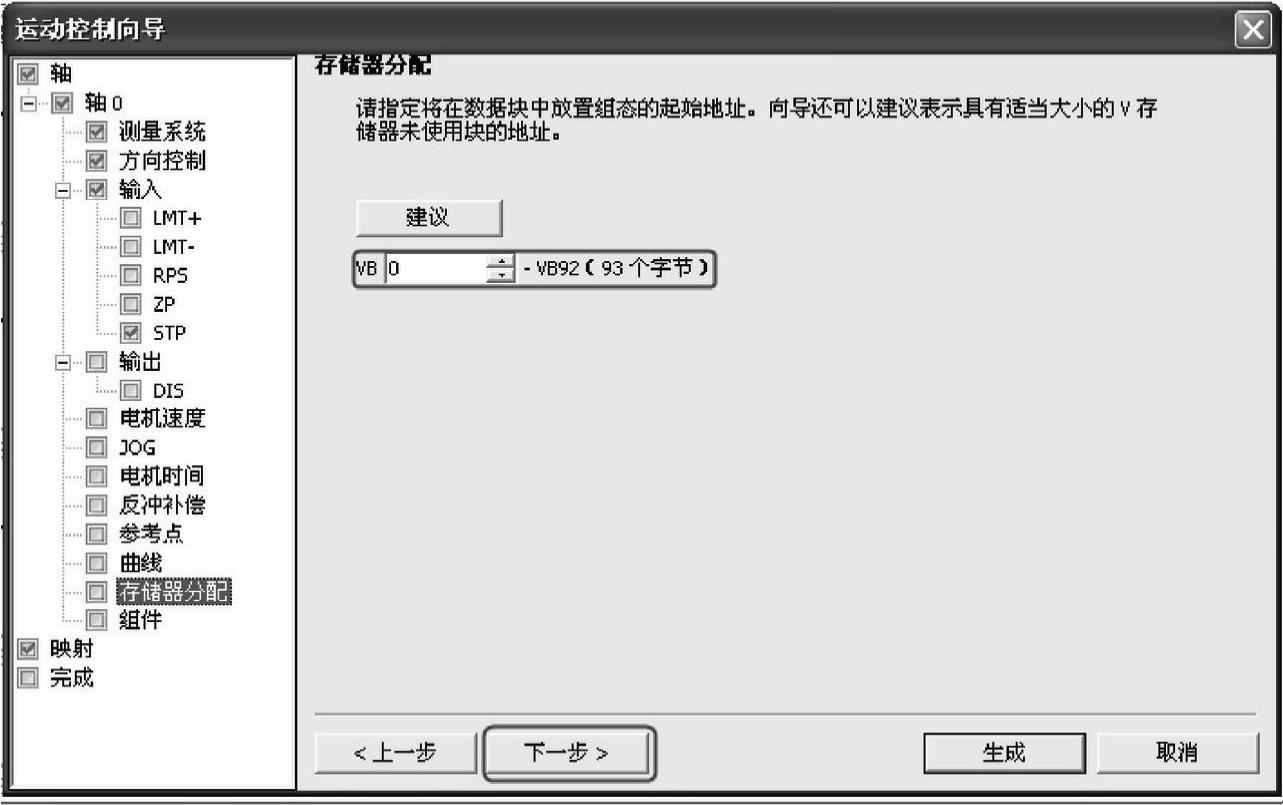
图10-19 为配置分配存储区
(10)完成组态
单击“下一步”按钮,如图10-20所示。弹出如图10-21所示的界面,单击“生成”按钮,完成组态。
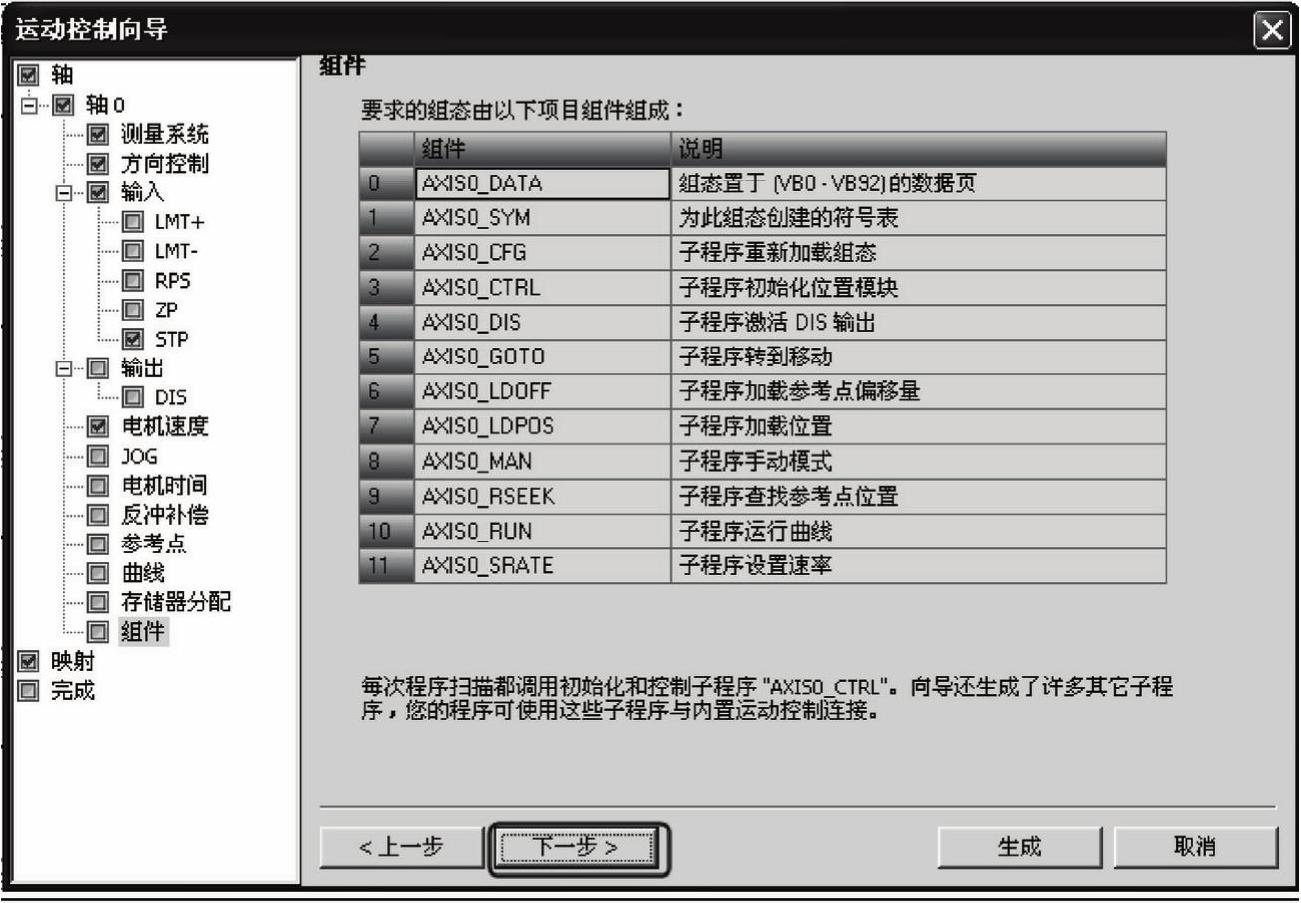
图10-20 完成组态
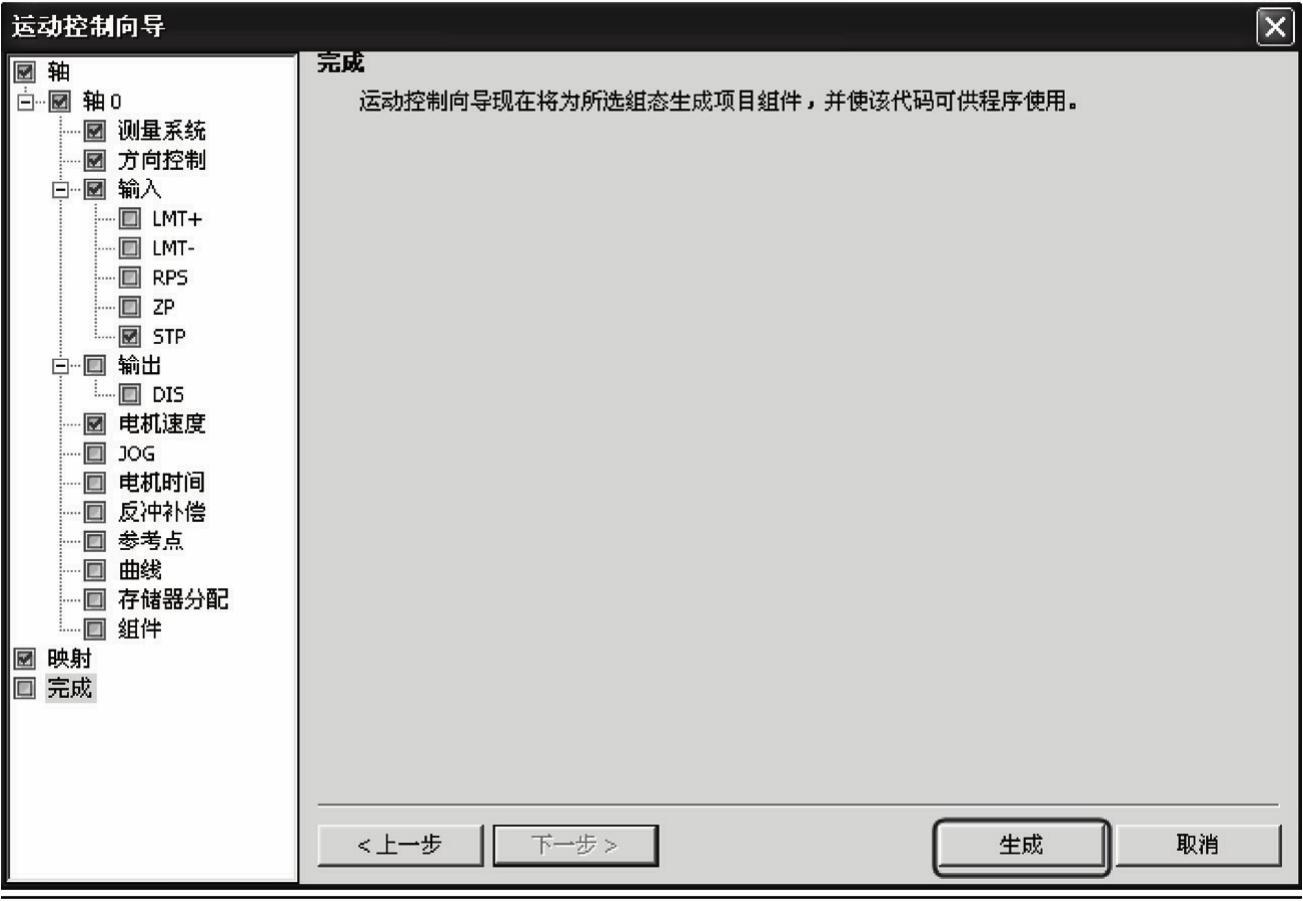
图10-21 生成程序代码
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






