【例7-2】剪切机上有1套步进驱动系统,步进驱动器的型号为SH-2H042Ma,步进电动机的型号为17HS111,是两相四线直流24V步进电动机,用于送料,送料长度是200mm,当送料完成后,停1s开始剪切,剪切完成2s后,再自动进行第二个循环。要求:按下按钮SB1开始工作,按下按钮SB2停止工作。请画出I/O接线图并编写程序。
【解】
1.主要软硬件配置
1)1套STEP7-Micro/WIN SMART V1.0。
2)1台步进电动机,型号为17HS111。
3)1台步进驱动器,型号为SH-2H042Ma。
4)1台CPU ST40。
2.步进电动机与步进驱动器的接线
本系统选用的步进电动机是两相四线的步进电动机,其型号是17HS111,这种型号的步进电动机的出线接线图如图7-10所示。其含义是:步进电动机的4根引出线分别是红色、绿色、黄色和蓝色;其中红色引出线应该与步进驱动器的A+接线端子相连,绿色引出线应该与步进驱动器的A−接线端子相连,黄色引出线应该与步进驱动器的B+接线端子相连,蓝色引出线应该与步进驱动器的B−接线端子相联。
3.PLC与步进电动机、步进驱动器的接线
步进驱动器有共阴和共阳两种接法,这与控制信号有关系,通常西门子PLC输出信号是+24V信号(即PNP型接法),所以应该采用共阴接法,所谓共阴接法就是步进驱动器的DIR−和CP−与电源的负极短接,如图7-10所示。顺便指出,三菱的PLC输出的是低电位信号(即NPN型接法),因此应该采用共阳接法。
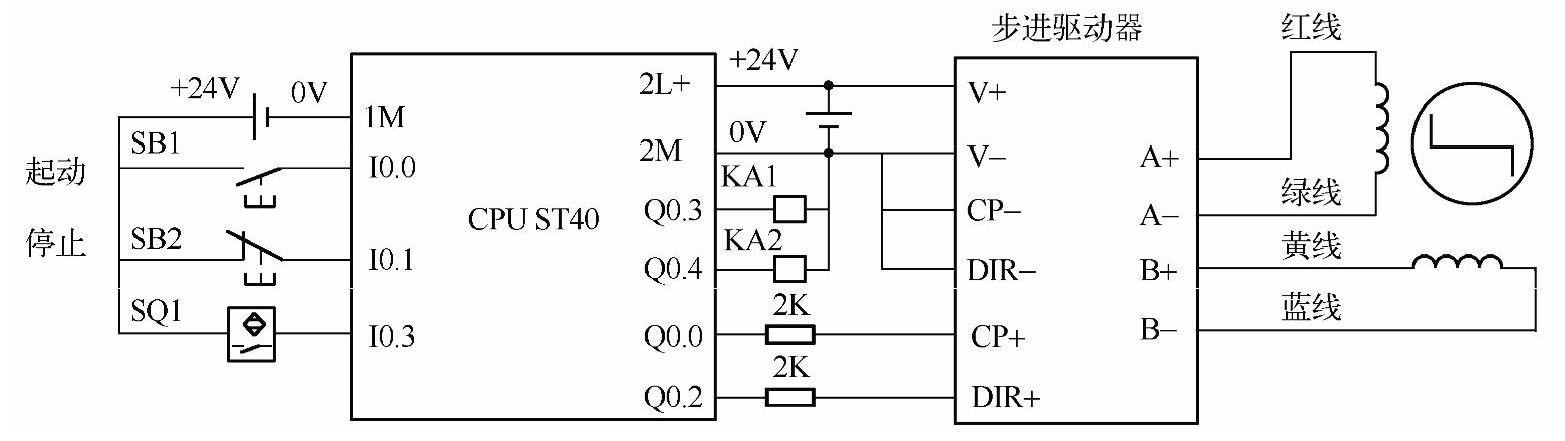
图7-10 PLC与驱动器和步进电动机接线图
那么PLC能否直接与步进驱动器相连接呢?一般情况下是不能的。这是因为步进驱动器的控制信号通常是+5V,而西门子PLC的输出信号是+24V,显然是不匹配的。解决问题的办法就是在PLC与步进驱动器之间串联一只2kΩ电阻,起分压作用,因此输入信号近似等于+5V。有的资料指出串联一只2kΩ的电阻是为了将输入电流控制在10mA左右,也就是起限流作用,在这里电阻的限流或分压作用的含义在本质上是相同的。CP+(CP−)是脉冲接线端子,DIR+(DIR−)是方向控制信号接线端子。PLC接线图如图7-10所示。有的步进驱动器只能接“共阳接法”,如果使用西门子S7-200 SMART PLC控制这种类型的步进驱动器,则不能直接连接,必须将PLC的输出信号进行反相。另外,读者还要注意,输入端的接线采用是PNP接法,因此两只接近开关是PNP型,若读者选用的是NPN型接近开关,那么接法就不同了。
【关键点】步进驱动器的控制信号通常是+5V,但并不绝对,例如有的工控企业为了使用方便,特意到驱动器的生产厂家定制24V控制信号的驱动器。
4.组态硬件
高速输出有PWM模式和运动轴模式,对于较复杂的运动控制显然用运动轴模式控制更加便利。以下将具体介绍这种方法。
(1)激活“运动控制向导”
打开STEP 7软件,在主菜单“工具”栏中单击“运动”选项,弹出装置选择界面,如图7-11所示。

图7-11 激活“位置控制向导”
(2)选择需要配置的轴
CPU ST40系列PLC内部有三个轴可以配置,本例选择“轴0”即可,如图7-12所示,再单击“下一步”按钮。
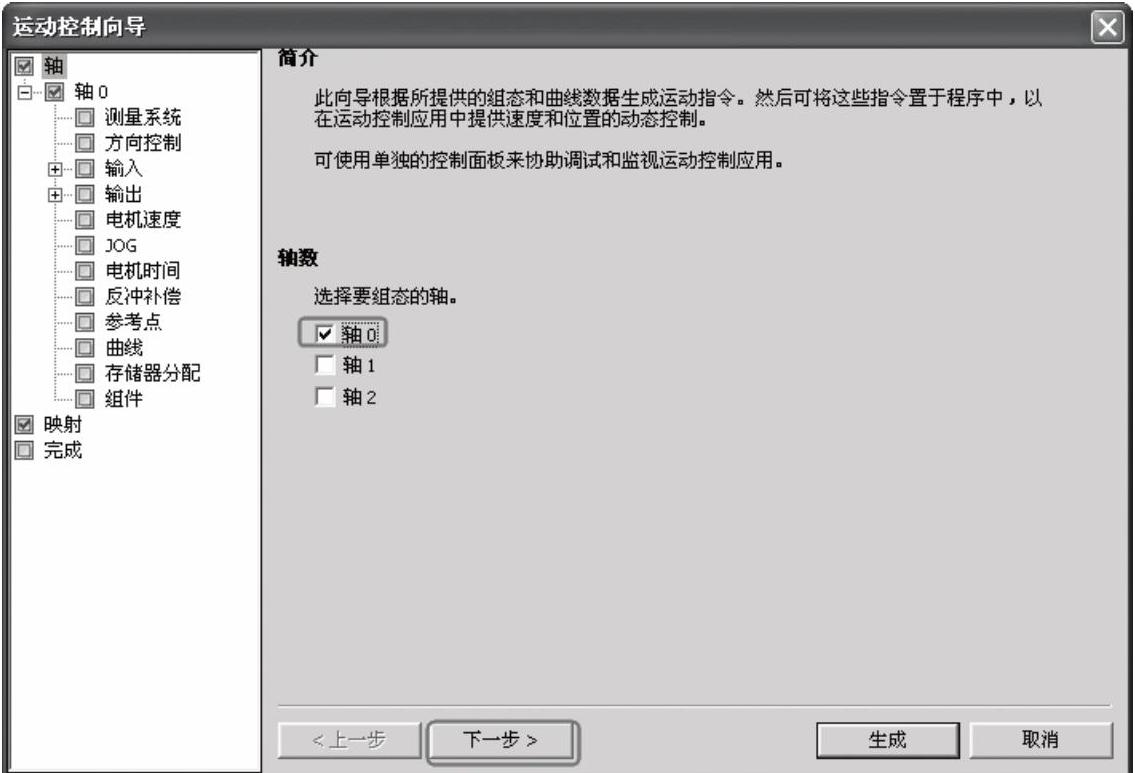
图7-12 选择需要配置的轴
3)为所选择的轴命名
为所选择的轴命名,本例为默认的“轴0”,再单击“下一步”按钮,如图7-13所示
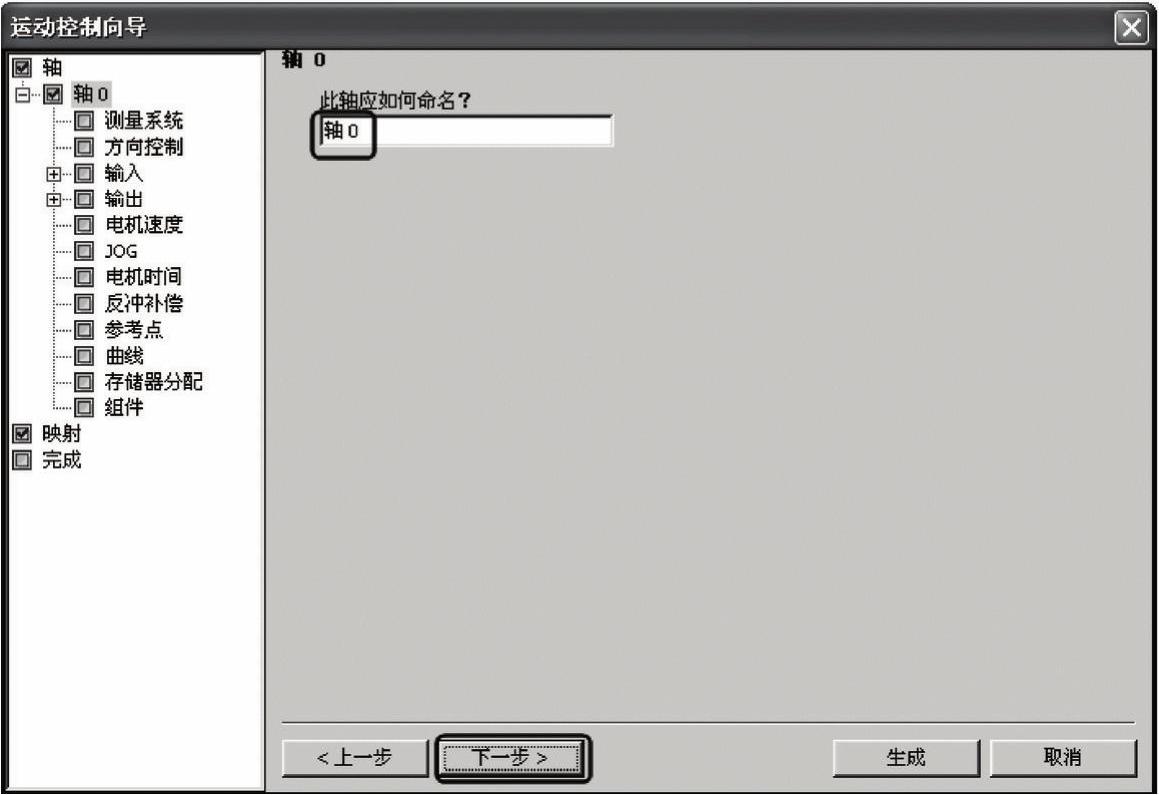
图7-13 为所选择的轴命名
(4)输入系统的测量系统
在“选择测量系统”选项中选择“工程单位”。由于步进电动机的步距角为1.8°,所以电动机转一圈需要200个脉冲,所以“电机一次旋转所需的脉冲”为“200”;“测量单位”设为“mm”;“电机一次旋转产生多少mm运动”为“10”;这些参数与实际的机械结构有关,再单击“下一步”按钮,如图7-14所示。
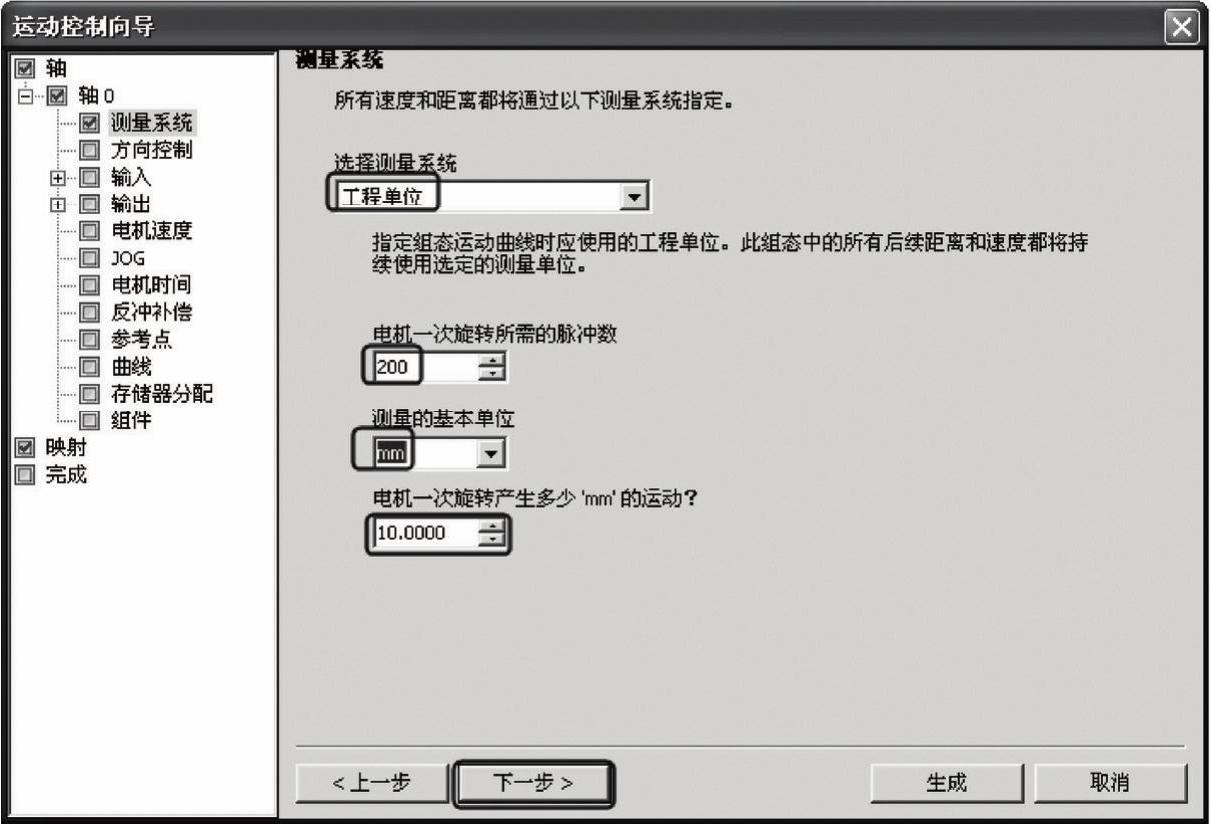
图7-14 输入系统的测量系统
5)设置脉冲方向输出
设置有几路脉冲输出,其中有单相(1个输出)、双向(2个输出)和正交(2个输出)三个选项,本例选择“单相(1个输出)”;再单击“下一步”按钮,如图7-15所示。
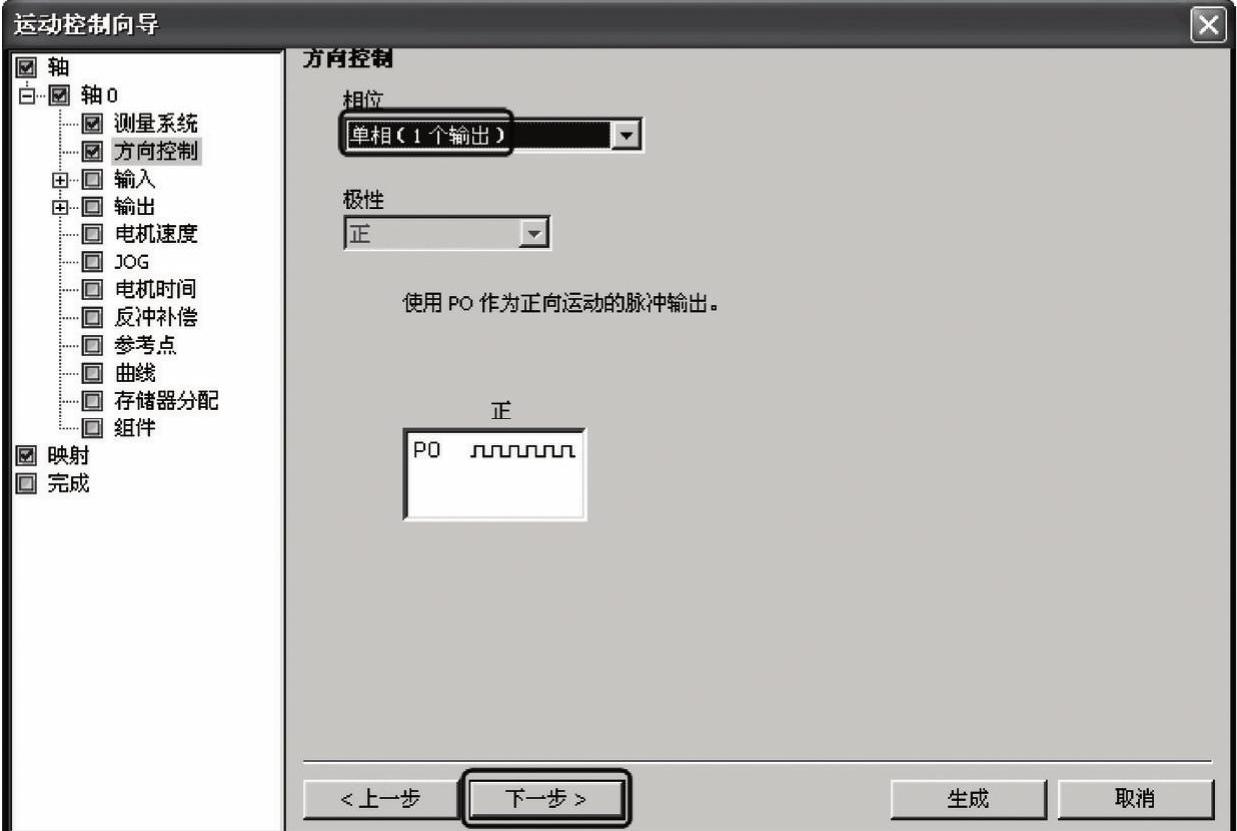
图7-15 设置脉冲方向输出
(6)分配输入点
本例中并不用到LMT+(正限位输入点)、LMT-(负限位输入点)、RPS(参考点输入点)和ZP(零脉冲输入点),所以可以不设置。直接选中“STP”(停止输入点),选择“启用”,停止输入点为“I0.1”,指定相应输入点有效时的响应方式为“减速停止”,指定输入信号有效电平为“高”电平有效,再单击“下一步”按钮,如图7-16所示。
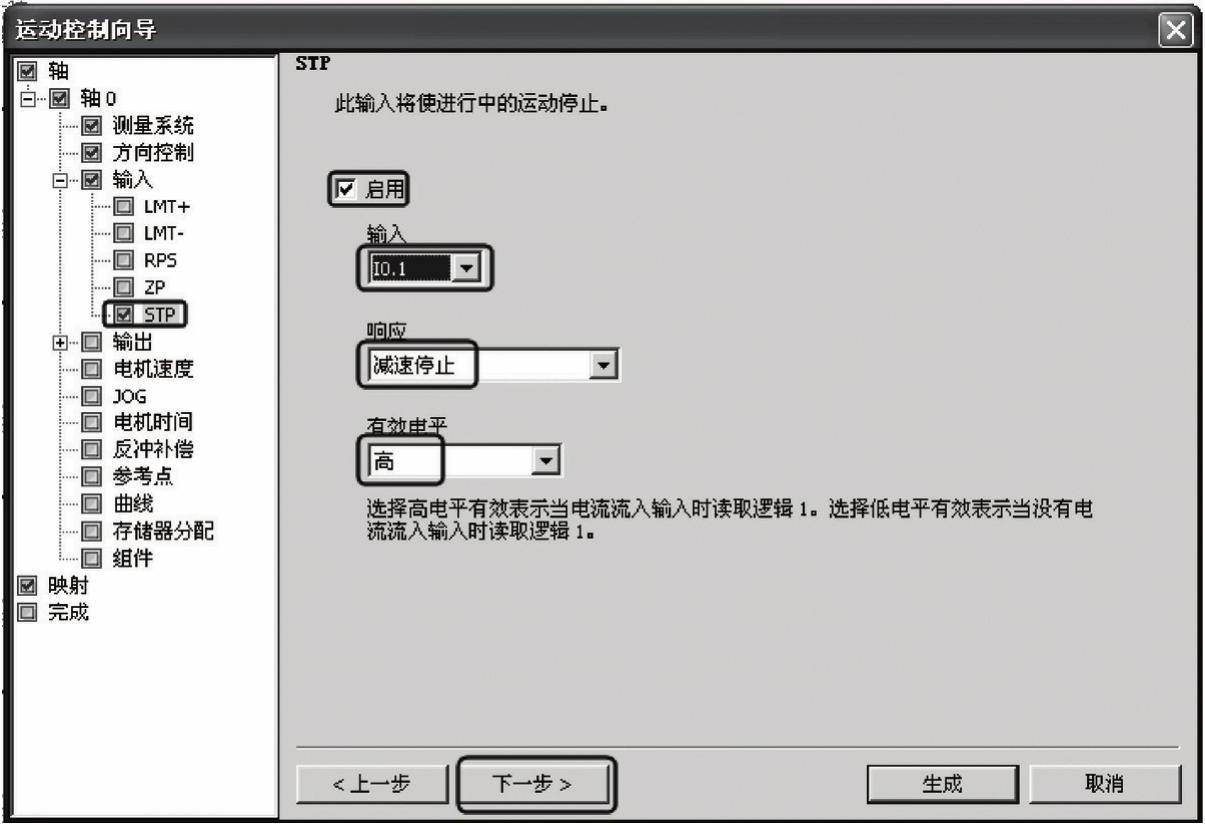
图7-16 分配输入点
7)指定电动机速度(www.daowen.com)
MAX_SPEED:定义电动机运动的最大速度。
SS_SPEED:根据定义的最大速度,在运动曲线中可以指定的最小速度。如果SS_SPEED数值过高,电动机可能在起动时失步,并且在尝试停止时,负载可能使电动机不能立即停止而多行走一段。停止速度也为SS_SPEED
设置如图7-17所示,在“1”、“2”和“3”处输入最大速度、最小速度、起动和停止速度,再单击“下一步”按钮。
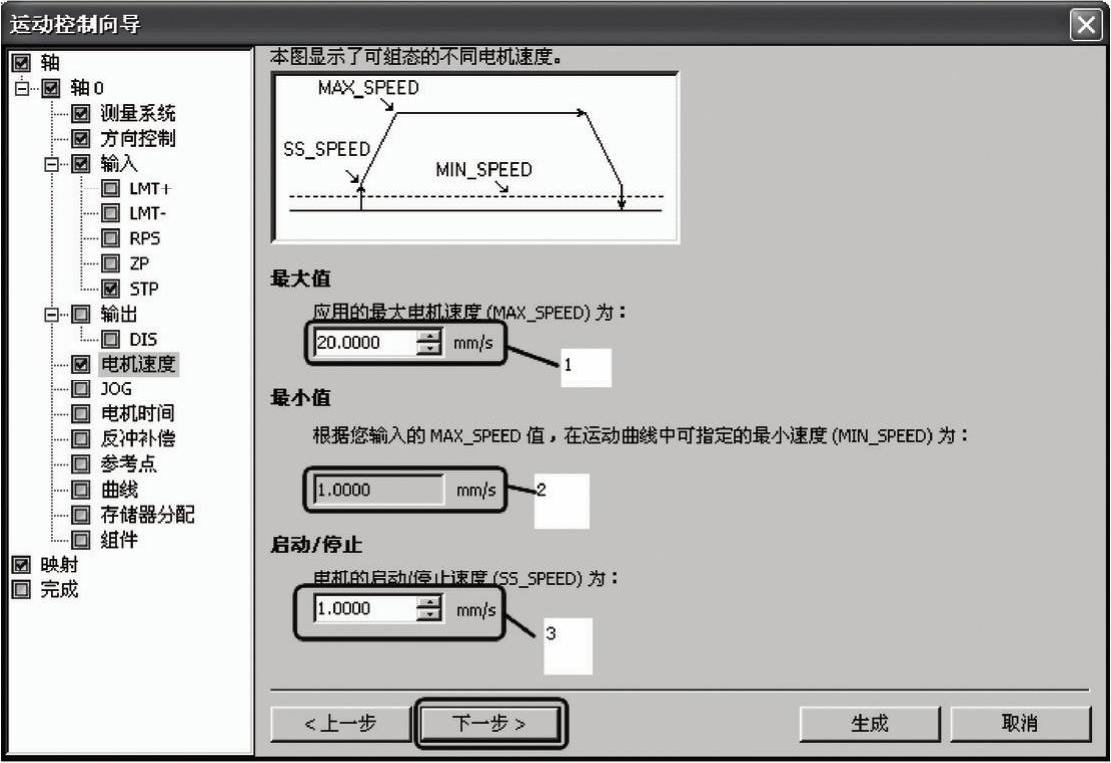
图7-17 指定电机速度
(8)设置加速和减速时间
ACCEL_TIME(加速时间):电动机从SS_SPEED加速至MAX_SPEED所需要的时间,默认值=1000ms(1s),本例选默认值,如图7-18所示的“1”处。
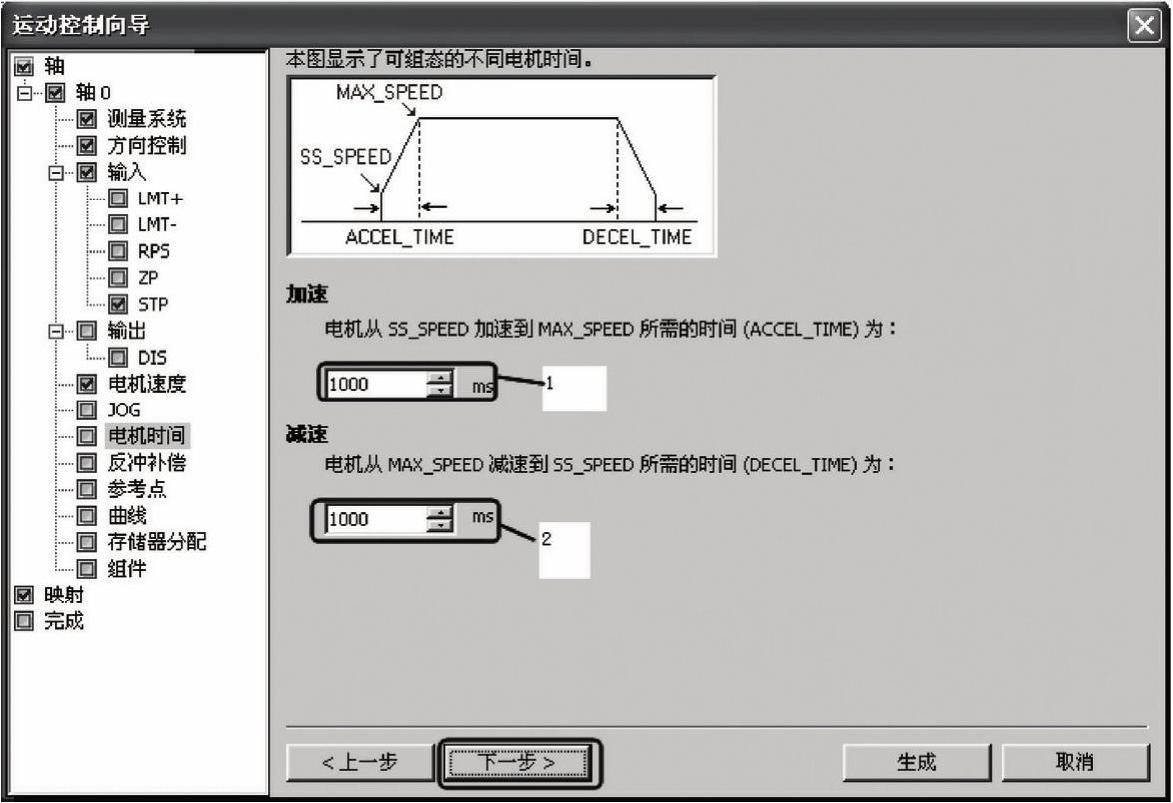
图7-18 设置加速和减速时间
DECEL_TIME(减速时间):电动机从MAX_SPEED减速至SS_SPEED所需要的时间,默认值=1000ms(1s),本例选默认值,如图7-18所示的“2”处,再单击“下一
步”按钮。
(9)为配置分配存储区
指令向导在V内存中以受保护的数据块页形式生成子程序,在编写程序时不能使用
PTO向导已经使用的地址,此地址段可以由系统推荐,也可以人为分配,人为分配的好处
是可以避开读者习惯使用的地址段。为配置分配存储区的VB内存地址如图7-19所示,
本例设置为“VB0~VB92”,再单击“下一步”按钮。
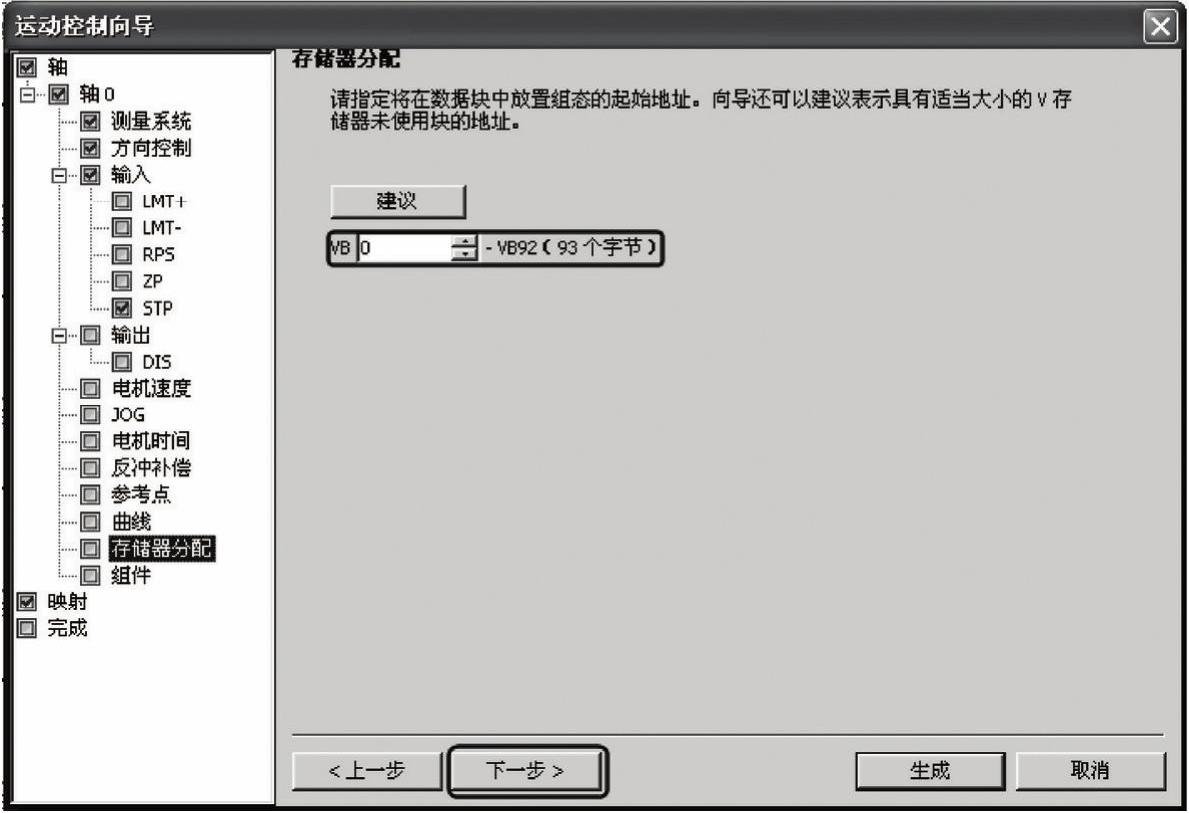
图7-19 为配置分配存储区
(10)完成组态
单击“下一步”按钮,如图7-20所示。弹出如图7-21所示的界面,单击“生成”按钮,完成组态。
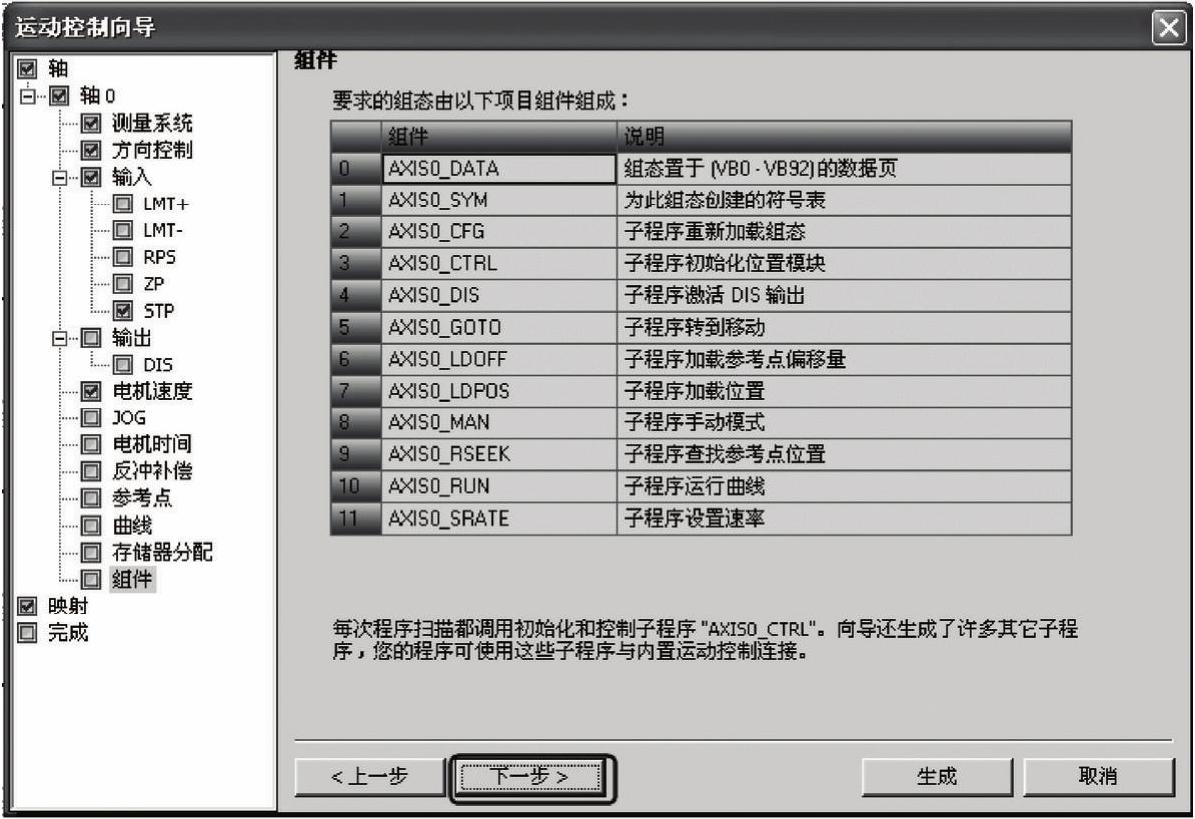
图7-20 完成组态(1)
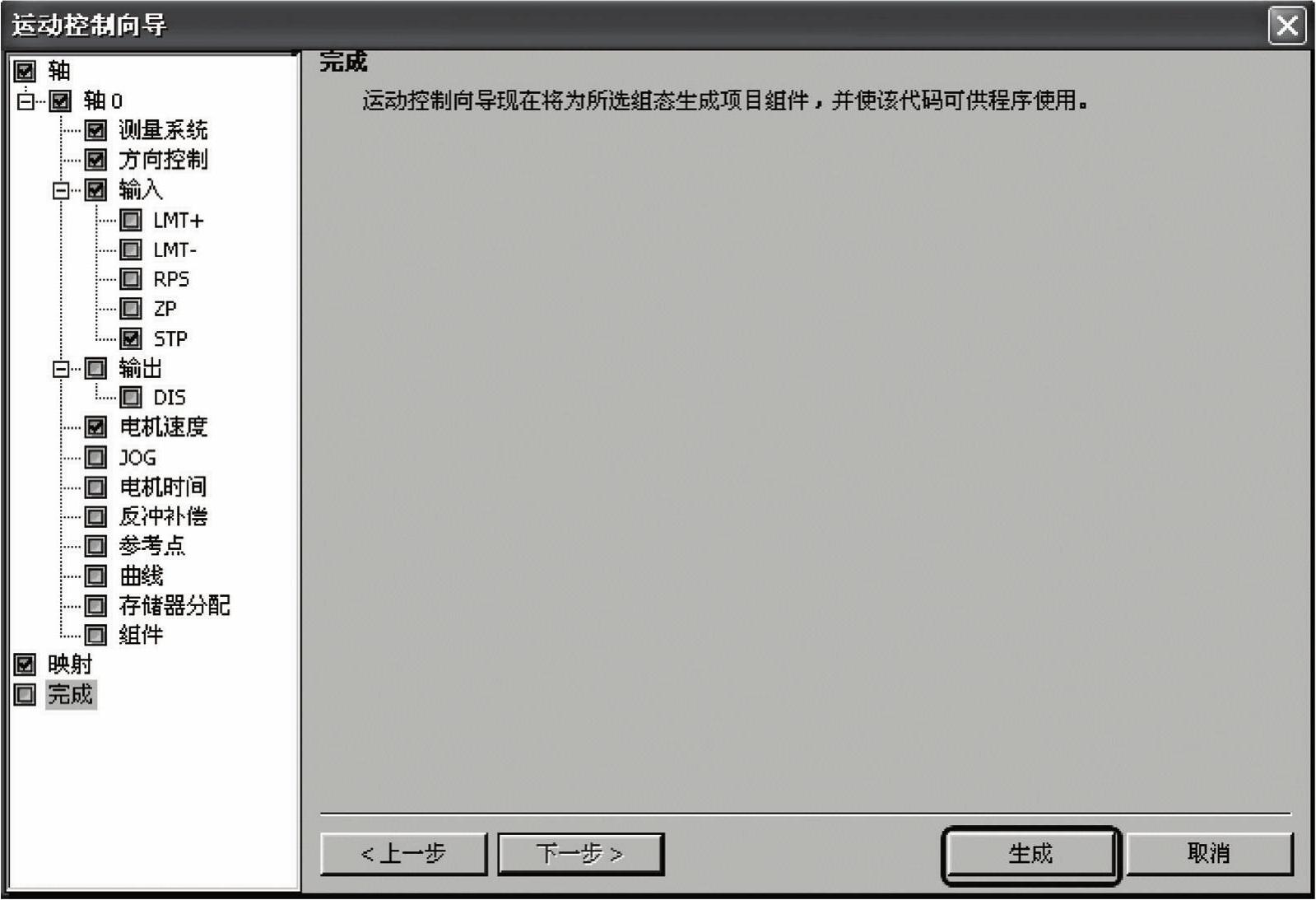
图7-21 生成程序代码
5.子程序简介
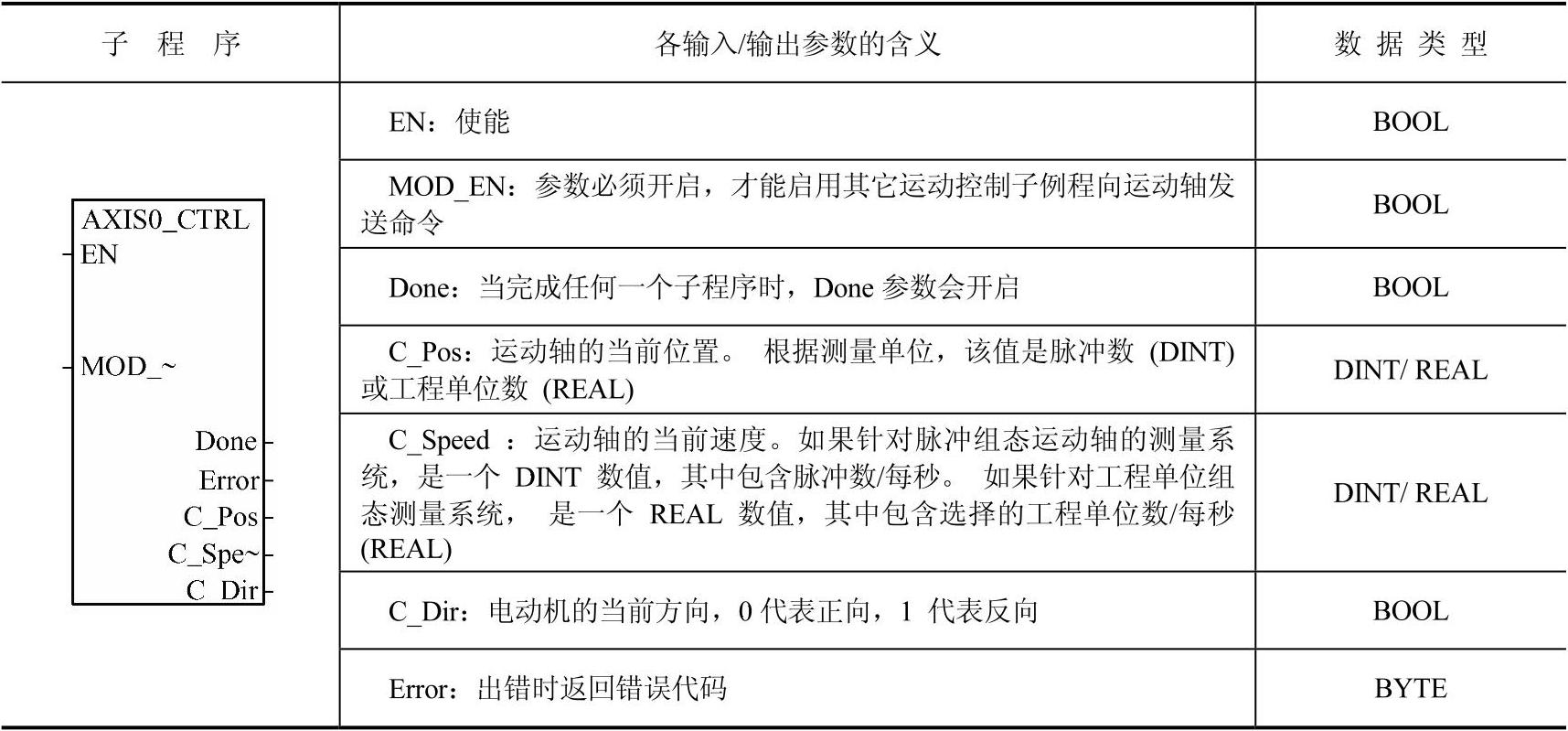
PTOx_CTRL子程序:(控制)启用和初始化运动轴,方法是自动命令运动轴,在每次CPU更改为RUN模式时,加载组态/包络表,每个运动轴使用此子例程一次,并确保程序会在每次扫描时调用此子例程。PTOx_CTRL子程序的参数见表7-5。
表7-5 PTOx_CTRL子程序的参数表
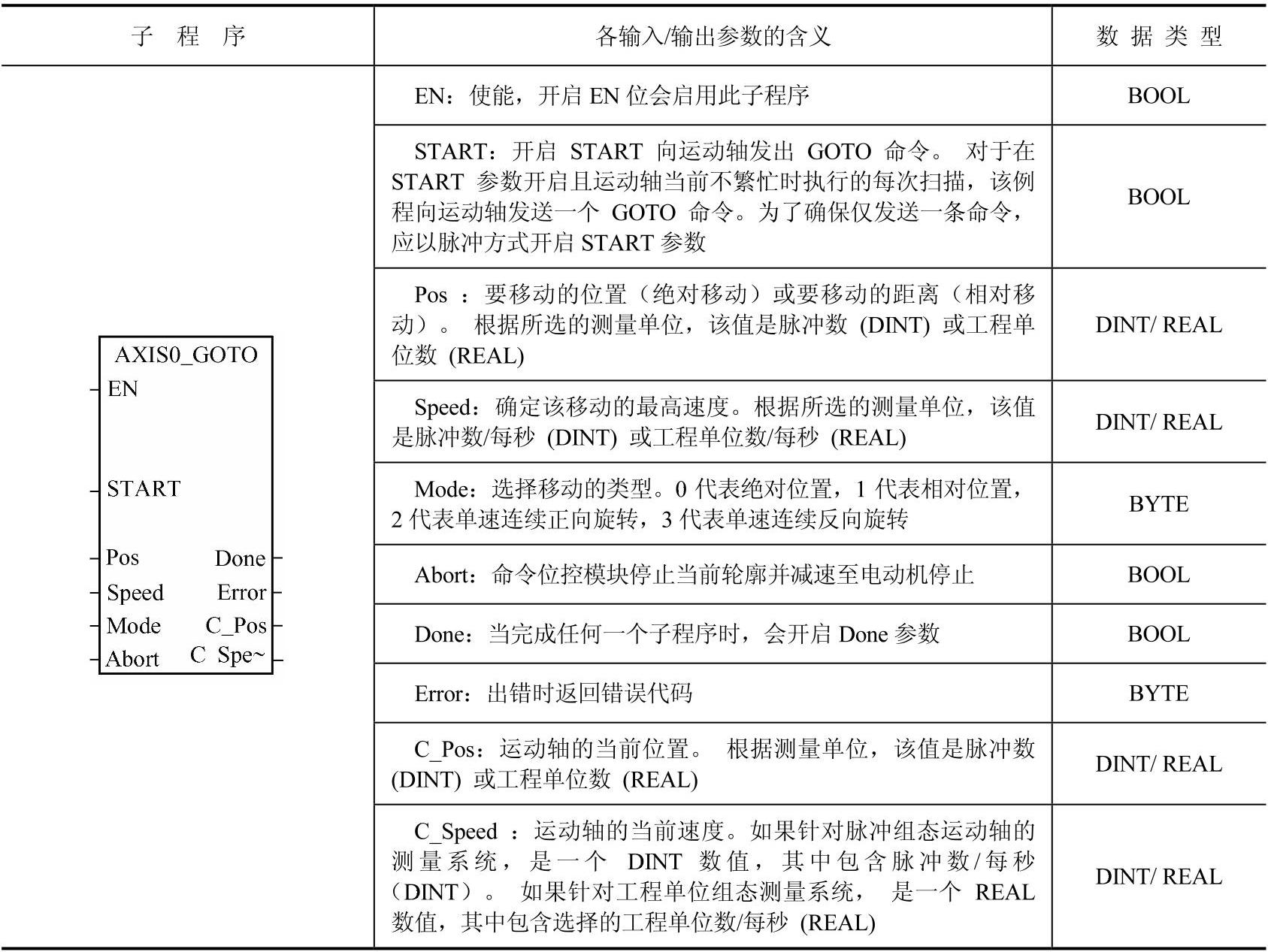
AXISx_GOTO:其功能是命令运动轴转到所需位置,这个子程序提供绝对位移和相对位移2种模式。AXISx_GOTO子程序的参数见表7-6。
表7-6 AXISx_GOTO子程序的参数表
6.编写程序
使用了运动向导,编写程序就比较简单了,但必须搞清楚两个子程序的使用方法,这是编写程序的关键,数据块的赋值如图7-22所示,梯形图如图7-23所示。
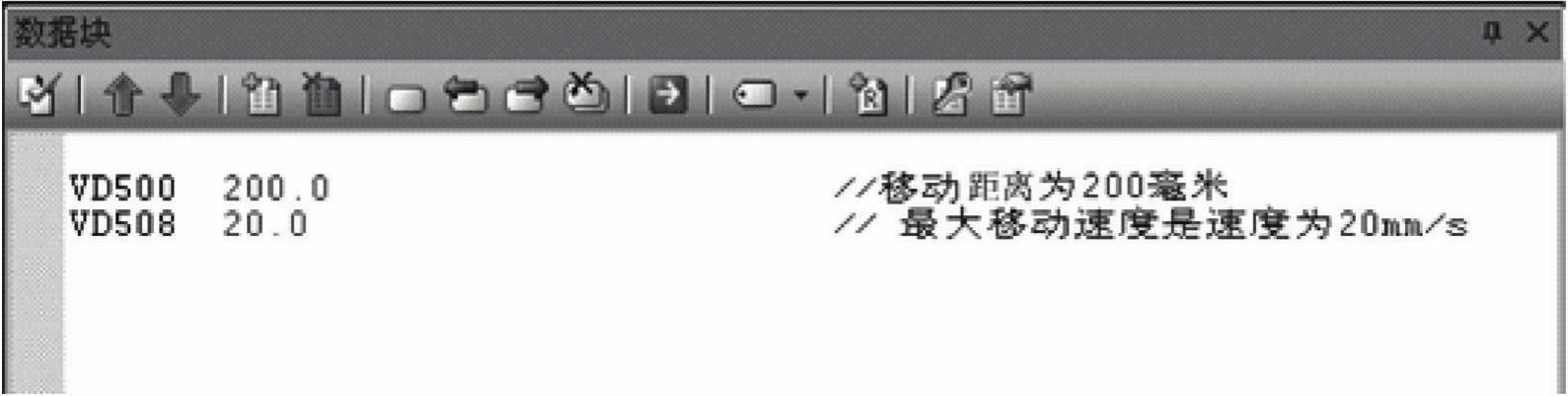
图7-22 数据块的赋值
【关键点】利用指令向导编写程序,其程序简洁、容易编写,特别是控制步进电动机加速起动和减速停止,显得非常方便,且能很好避免步进电动机失步。
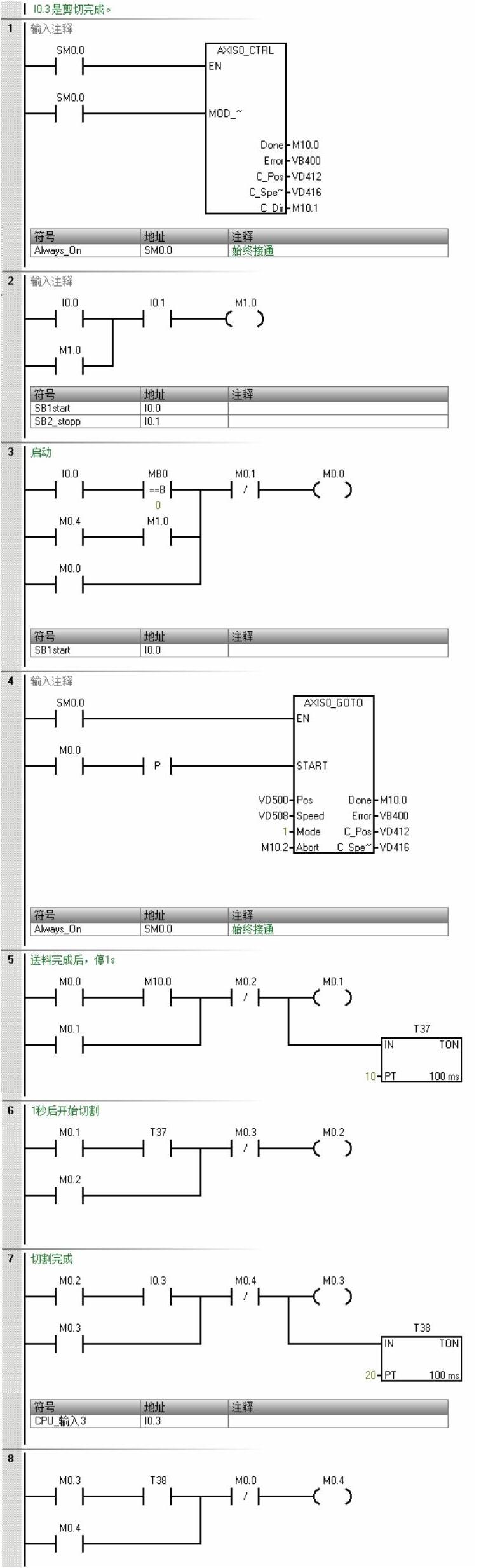
图7-23 梯形图
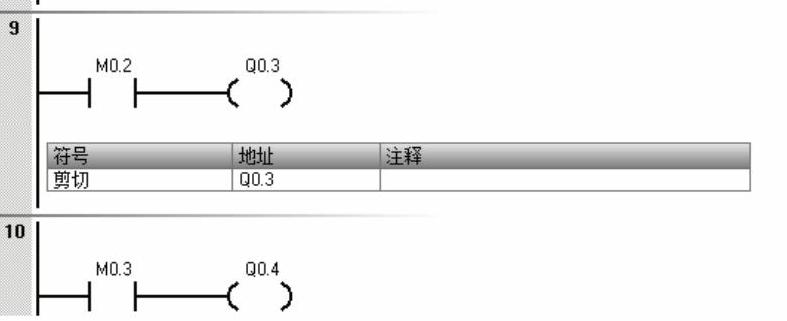
图7-23 梯形图(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





