在编写PLC程序时,基本逻辑指令是最为常用的,下面用几个例子说明用基本指令编写程序的方法。
【例4-20】电动机的正反转控制,I0.0与电动机正转起动按钮连接,I0.1与电动机反转起动按钮连接,I0.2与电动机停止按钮(常闭)连接,I0.3与电动机热继电器(常开)连接,Q0.0接通电动机正转,Q0.1接通电动机反转,请画出接线图并编写梯形图程序。
【解】方法1:电动机正/反转接线图如图4-39所示,梯形图如图4-40所示。梯形图中虽然有Q0.0和Q0.1的常闭触点互锁,但由于PLC的扫描速度极快,Q0.0的断开和Q0.1的接通几乎是同时发生的,若PLC的外围电路无互锁触点,就会使正转接触器断开,其触点间的电弧未灭时,反转接触器已经接通,可能导致电源瞬时短路。为了避免这种情况的发生,外部电路需要互锁,图4-39用KM1和KM2实现了这一功能。正/反转切换时,最好能延时一段时间。读者可以想一想,若停止按钮与常开触点相连,则梯形图应该作何变化?
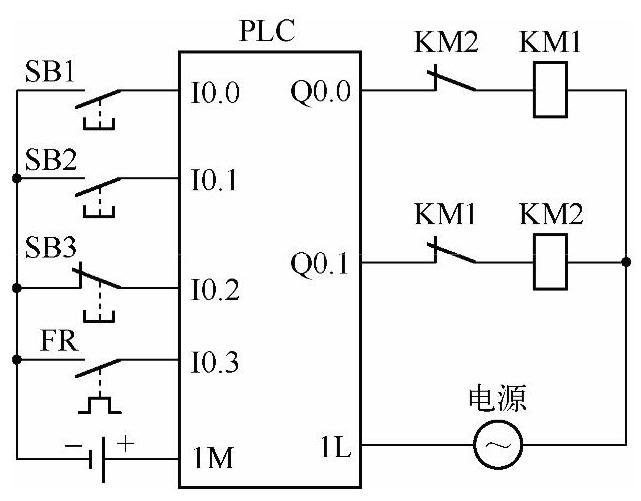
图4-39 I/O接线图
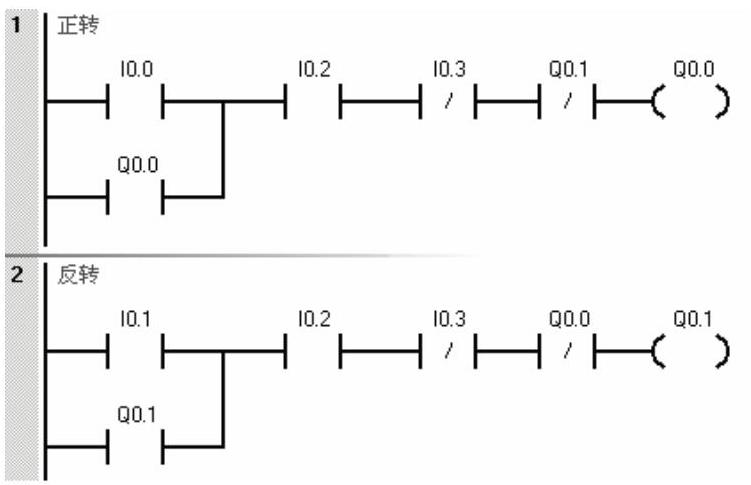
图4-40 电动机正/反转梯形图(方法1)
方法2:梯形图如图4-41所示。
【例4-21】请编写三相异步电动机的Y-△(星形-三角形)起动控制程序。
【解】首先按下电源开关(I0.0),接通总电源(Q0.0),再接通起动开关(I0.1),使电动机绕组实现Y形联结(Q0.1),延时5s后,电动机绕组改为△形联结(Q0.2)。按下停止按钮(I0.2),电动机停转。Y-△减压起动主回路如图4-42所示,梯形图如图4-43所示,接线图如图4-44所示。
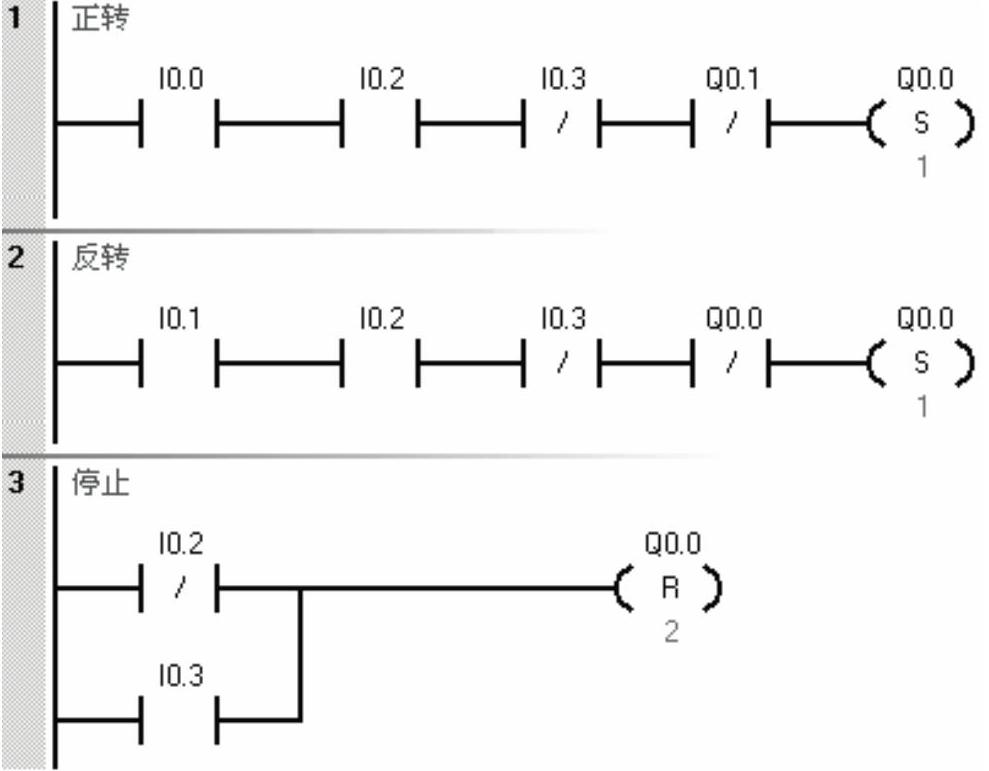
图4-41 电动机正反转梯形图(方法2)
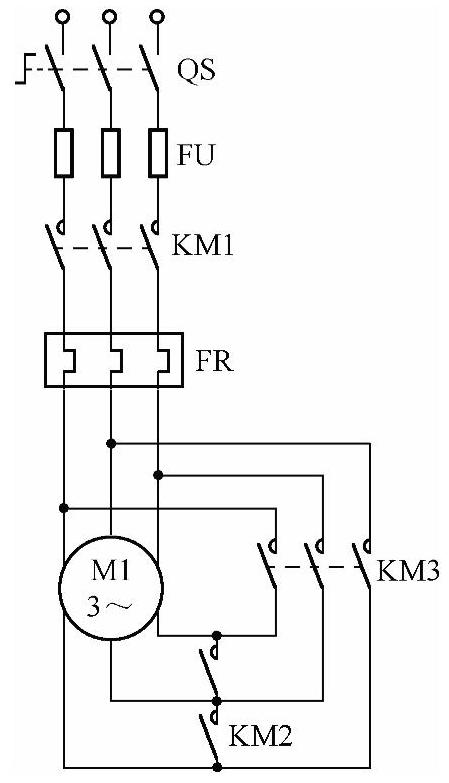
图4-42 电动机Y-△减压起动主回路图
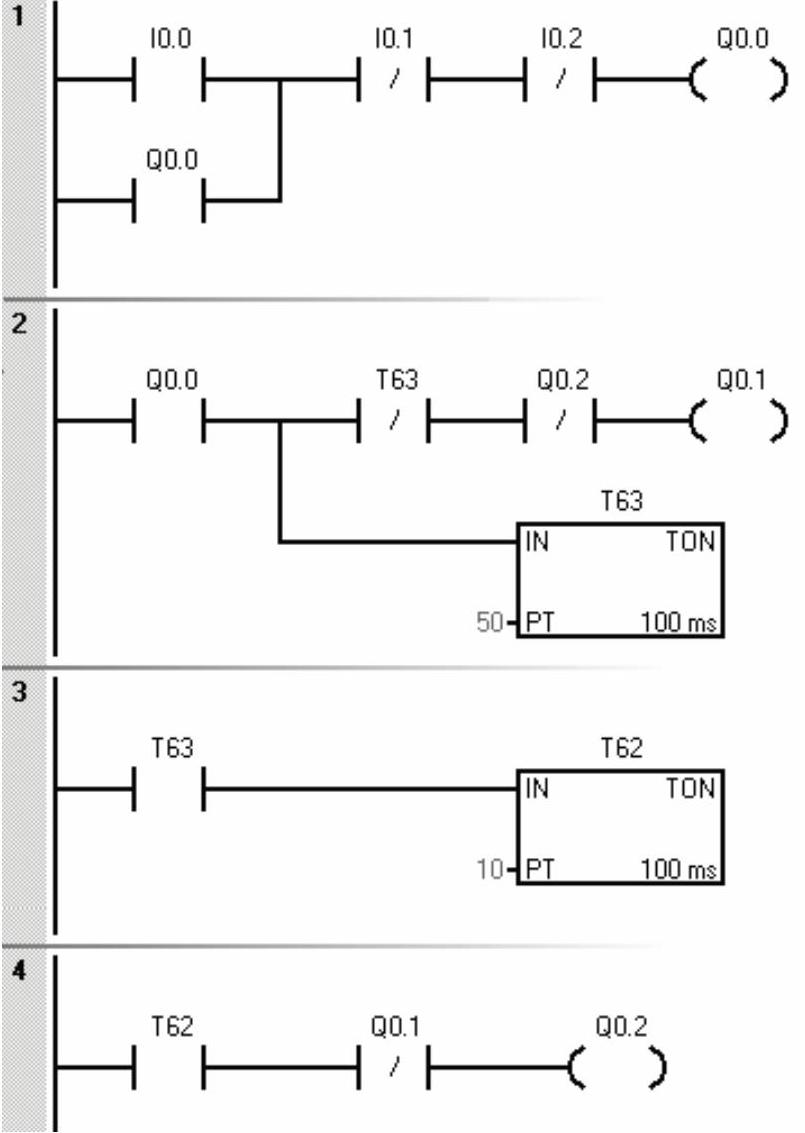
图4-43 Y-△起动控制梯形图
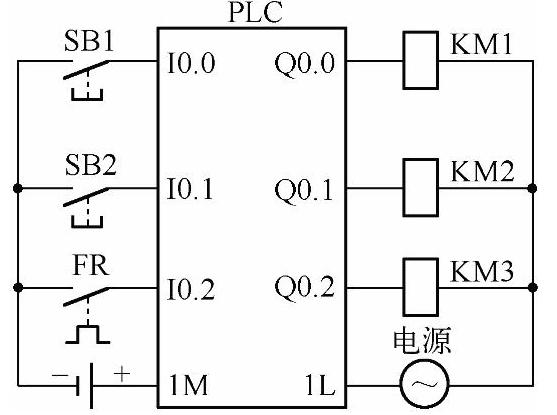
图4-44 Y-△起动控制接线图
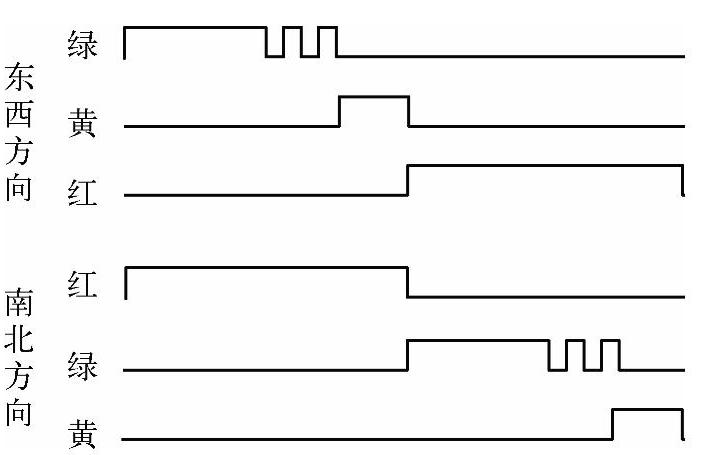
【例4-22】十字路口的交通灯控制,当合上启动按钮时,东西方向亮4s,闪烁2s后灭;黄灯亮2s后灭;红灯亮8s后灭;绿灯亮4s,如此循环,而对应东西方向绿灯、红灯、黄灯亮时,南北方向红灯亮8s后灭;接着绿灯亮4s,闪烁2s后灭;红灯又亮,如此循环。请画出接线图,并编写PLC控制程序。
【解】首先根据题意画出东西和南北方向3种颜色灯亮灭的时序图,再进行I/O分配。
输入:启动-I0.0;停止-I0.1。
输出(东西方向):红灯-Q1.0,黄灯-Q1.1,绿灯-Q1.2。
输出(南北方向):红灯-Q0.0,黄灯-Q0.1,绿灯-Q0.2。
东西和南北方向各有3盏,从时序图容易看出,共有6个连续的时间段,因此要用到6个定时器,这是解题的关键,用这6个定时器控制两个方向6盏灯的亮或灭,不难设计出梯形图。交通灯时序图、I/O接线图和交通灯梯形图分别如图4-45~图4-47所示。
 (www.daowen.com)
(www.daowen.com)
图4-45 交通灯时序图
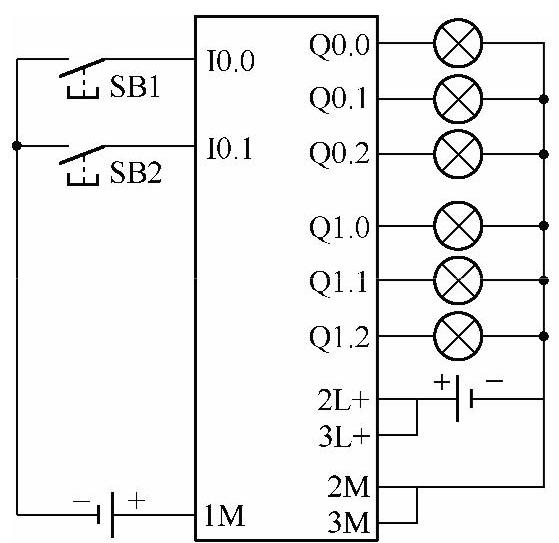
图4-46 I/O接线图
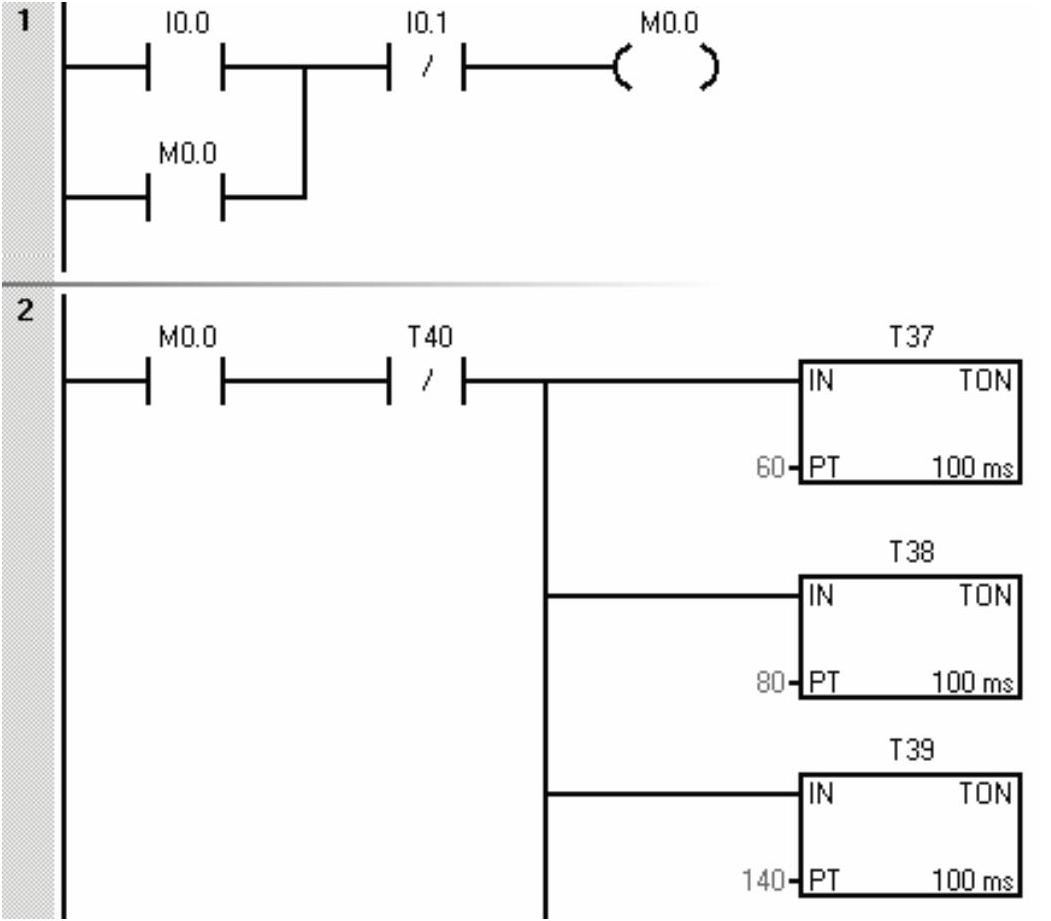
图4-47 交通灯梯形图
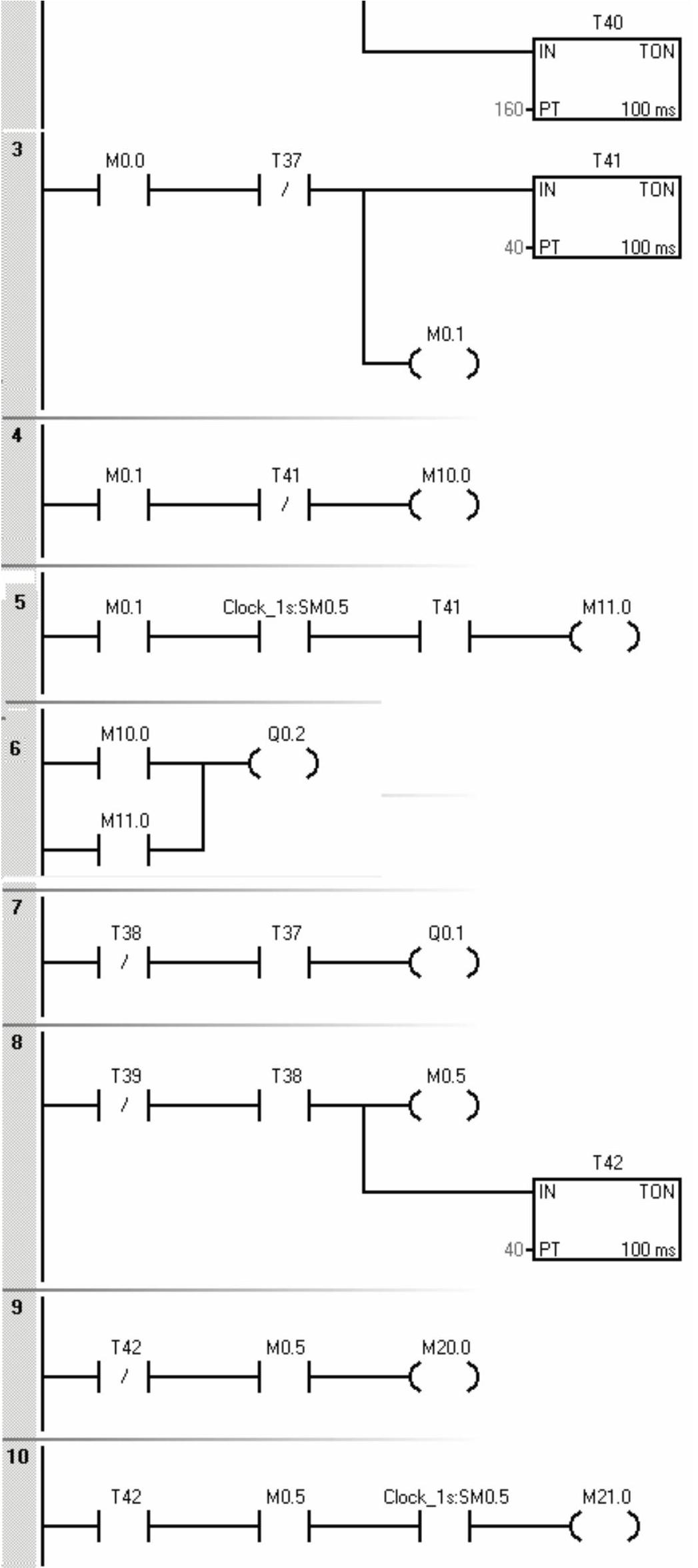
图4-47 交通灯梯形图(续)
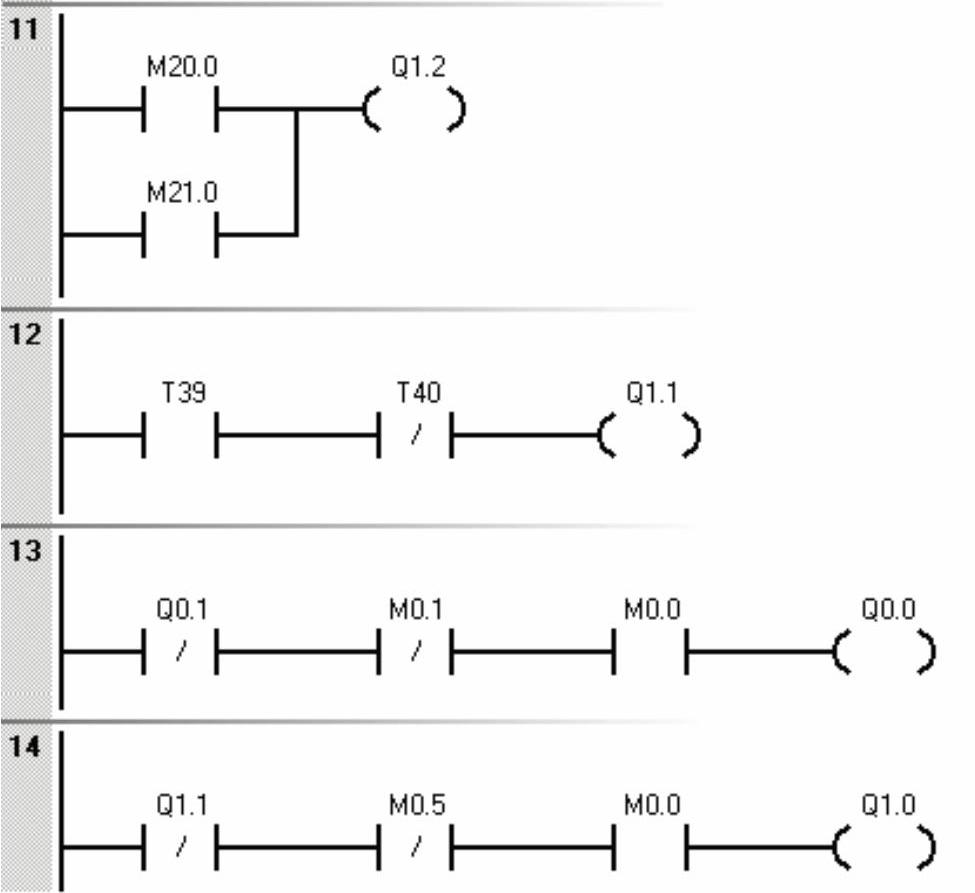
图4-47 交通灯梯形图(续)
【例4-23】如图4-48所示的气动机械手由3个汽缸组成,即汽缸A、B、C。其接线图如图4-49所示。其工作过程是:当接近开关SQ0检测到有物体时,系统开始工作,汽缸A向左运行;到极限位置SQ2后,汽缸B向下运行,直到极限位置SQ4为止;接着手指汽缸C抓住物体,延时1s;然后汽缸B向上运行;到极限位置SQ3后,汽缸A向右运行;到极限位置SQ1,此时手指汽缸C释放物体,并延时1s,完成搬运工作。电磁阀YV1上电汽缸A向左运行,电磁阀YV2上电汽缸A向右运行,电磁阀YV3上电,汽缸B向下运行,电磁阀YV4上电,汽缸B向上运行,电磁阀YV5上电,汽缸C夹紧,电磁阀YV5断电,汽缸C松开。请画出接线图、流程图和梯形图。
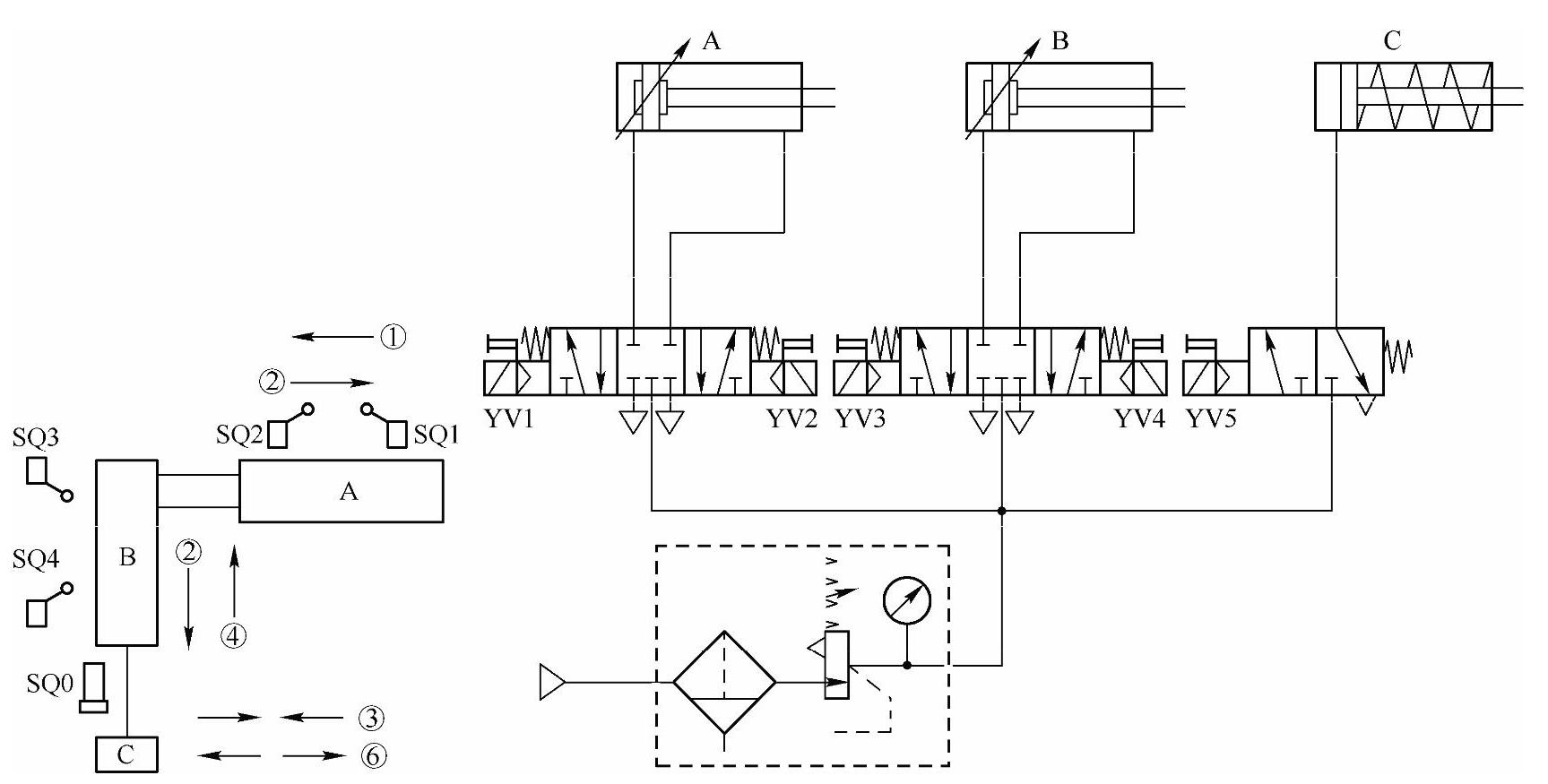
图4-48 机械手示意图及气动原理图
【解】这个运动过程从逻辑上看比较复杂,如果不掌握规律,很难设计出正确的梯形图。一般可先根据题意画出流程图,再根据流程图写出布尔表达式,如图4-50所示。布尔表达式是有规律的,当前步的步名对应的继电器(如M0.1)等于上一步的步名对应的继电器(M0.0)与上一步的转换条件(I0.2)的乘积,再加上当前步的步名对应的继电器(M0.1)与下一步的步名对应的继电器非的乘积(M0.2),其他的布尔表达式的写法类似,最后根据布尔表达式画出梯形图,如图4-51所示。在整个过程中,流程图是关键,也是难点,而根据流程图写出布尔表达式和画出梯形图则比较简单。读者可在学完5.1节后再看图4-49的流程图。其中I0.5是复位按钮,I0.6是启动按钮,I0.7是急停按钮。
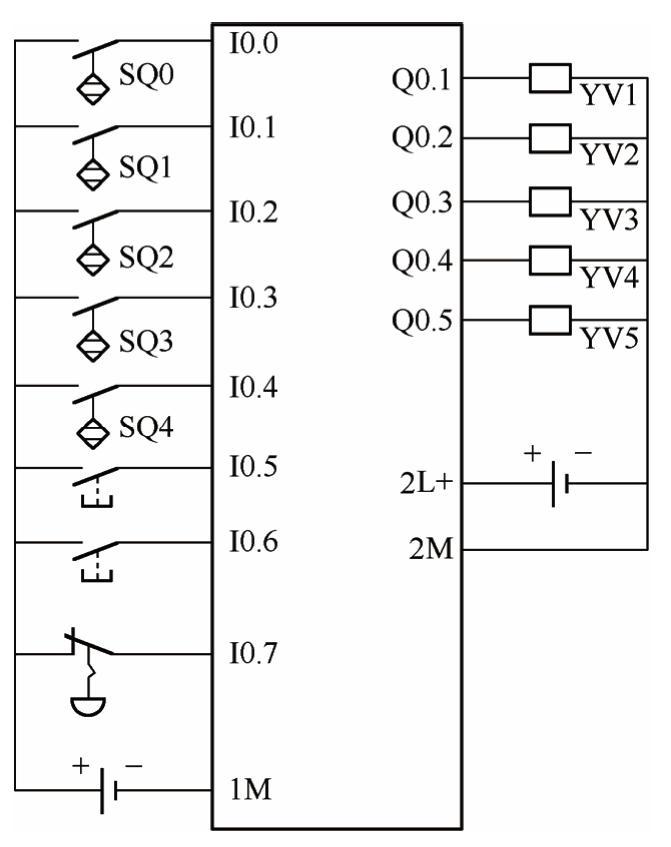
图4-49 机械手接线图
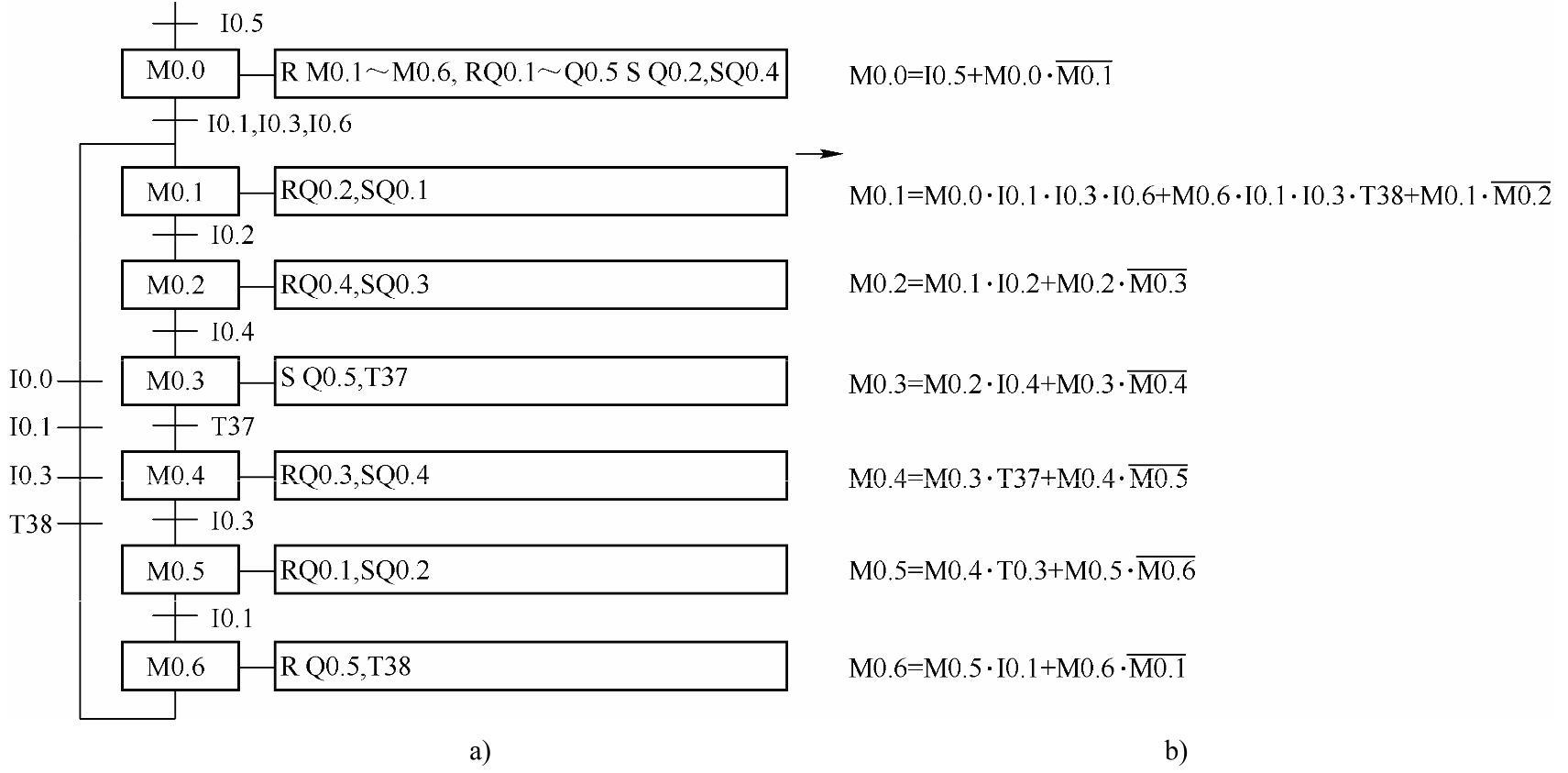
图4-50 机械手的流程图和布尔表达式对应关系图
a)流程图 b)布尔表达式
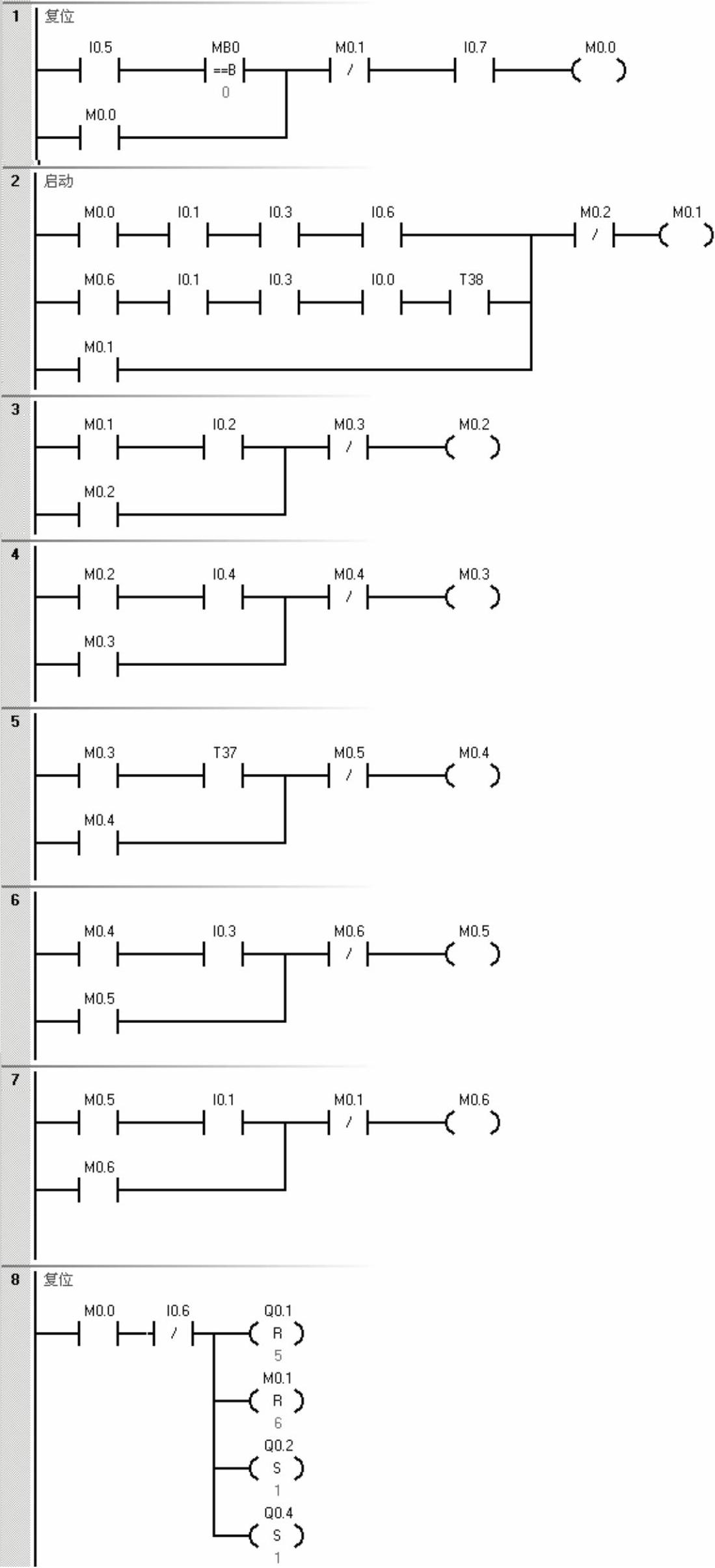
图4-51 机械手的梯形图
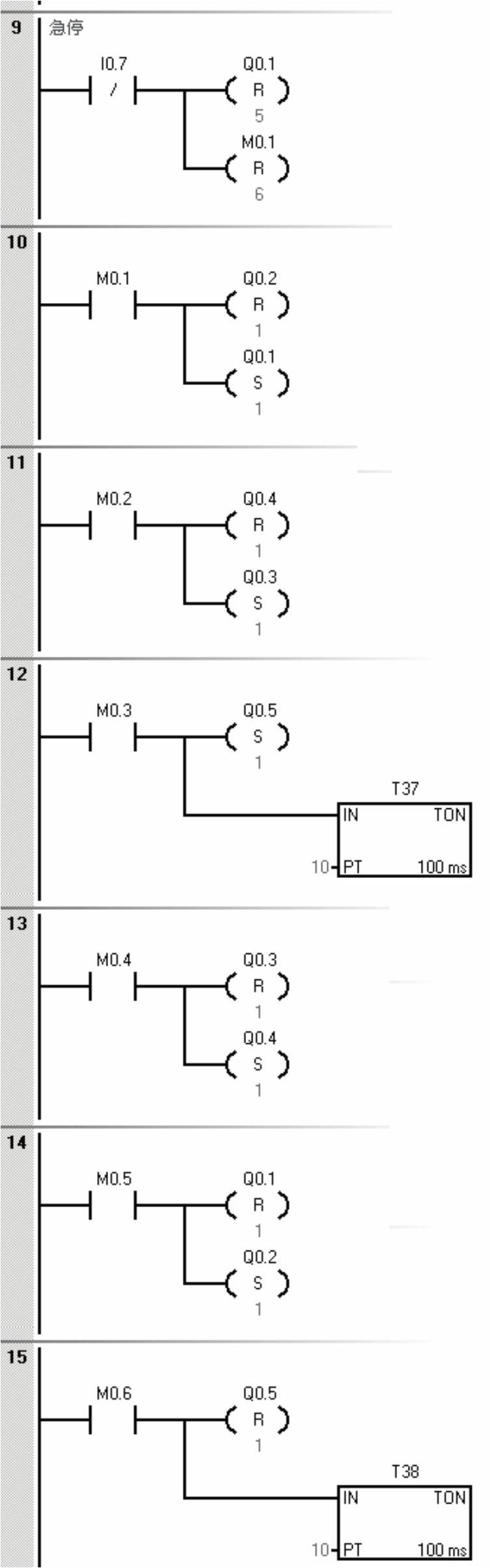
图4-51 机械手的梯形图(续)
【关键点】复位和急停的结果是不同的。当按下复位按钮时,气缸回到初始位置,这点很重要;但按下急停按钮后,气缸A和B停止在当前位置,只有气缸C松开,因为气缸C是单作用气缸,才自动复位。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




