永磁同步电机的起动是一个很关键的问题,通常采用的起动方法有:
1)开环起动;
2)使转子转动到预先设定的位置起动;
3)在静止时通过特定的算法估算转子位置。
如果想实现完全的无传感器运行,则需要研究在静止时的转子位置估算方法。已经有一些转子初始位置估算方法被提出来,但是这些方法大多适用于内埋式PMSM,根据内埋式PMSM对于不同的转子位置其电感不同的原理。
下面介绍一种静止时估算表面式PMSM的转子位置的方法。这种估算方法的原理基于定子铁心的非线性磁化特性。接近转子磁极的定子铁心受到转子磁极的影响,由于定子铁心的饱和特性,使得定子绕组中顺磁方向的电流增大很多,其绝对值比去磁方向的电流大。因此可以通过检测这种电流的变化来获得转子初始位置的信息。这种方法不需要电机的参数,也不需要额外的硬件设施。
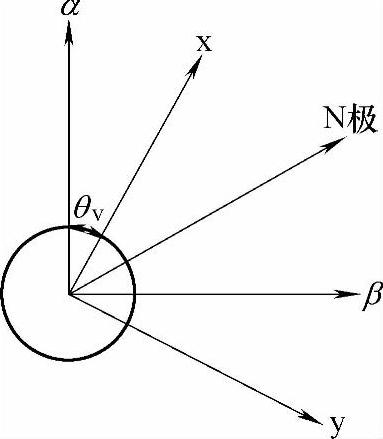
图6-22所示为PMSM的坐标系,其中x为所施加的电压矢量的方向,θv表示电压矢量的方向与α轴的夹角。
给电机施加不同的电压矢量,观察相应电压下的x轴电流,x轴电流由下面的公式得出:ix=iαcosθv+iβsinθv,通过观察可知:随着电压矢量接近转子的N极,由于磁场的饱和效应,相应的x轴电流也逐渐增加。所以,通过检测x轴电流的最大值,可以得出转子的初始位置信息。
转子初始位置检测方法的步骤如下:
θv定义为电压矢量的方向,θM为估算出的转子位置角度。
第一步:图6-23中的电压矢量1和7被施加到电机上,测量电流ix1和ix7。如果ix1>ix7,则矢量1比矢量7更加接近转子的N极,所以设定θM为0°。而且在这种情况下,ix max=ix1。而如果ix7>ix1,则θM=180°,且有ix max=ix7。
 (https://www.daowen.com)
(https://www.daowen.com)
图6-22 电机模型
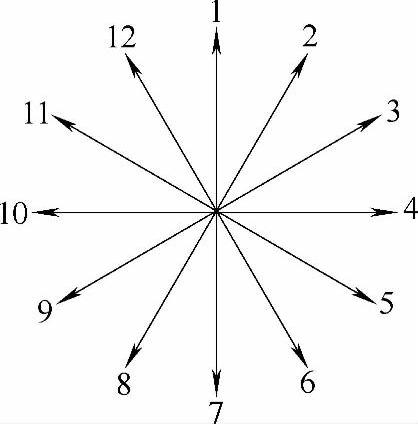
图6-23 所施加的电压矢量图
第二步:电压矢量2或者8被施加到电机上。例如,第一步得出θM=0°,则施加电压矢量2。如果ix2>ix max,则矢量2比矢量1更接近转子的N极,因此θM=30°,而且ix max=ix2。进一步,电压矢量3和4被施加,与上面的步骤一样,θM和ix max的值被更新。直到ix<ix max,则第二步结束,因为是前面的一个矢量更加接近转子的N极。而如果ix2<ix max,则矢量12、11和10被施加,同样更新θM和ix max的值。
如果第一步得到的是θM=180°,则施加电压矢量8,步骤与上面相同。在这个步骤中,估计的误差应该在15°以内。
第三步:在第二步得出的θM的基础上,施加矢量θM-7.5°、θM、θM+7.5°,与上面步骤一样得出新的θM和ix max的值。这样,估计的误差减小到3.75°,如图6-24所示。同样的过程再进行两次,可以使估算值更为准确。
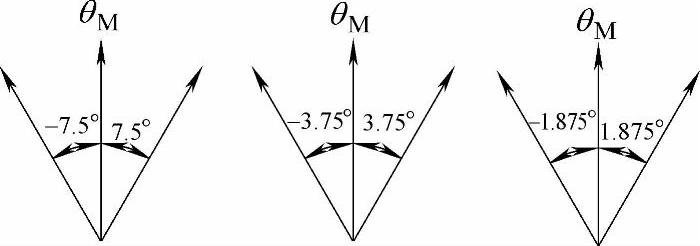
图6-24 第三步中应用的电压矢量
因为这种方法是检测电压矢量的电流响应,所以这种方法不受电机参数变化的影响。理论上,估算误差应该在0.9375°以内。
这种方法中,电压矢量的幅值和作用时间非常重要,如果施加到电机上的电压矢量的幅值过大,则可能在检测过程中电机开始转动,因此在实施转子初始位置检测之前,必须确定合适的电压矢量的幅值,使得转子初始位置的检测能够正常进行。具体确定最佳的电压幅值和作用时间的方法这里不再详细介绍。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





