在全数字化伺服系统中,可以用微处理器实现转速计算和调节、矢量变换、电流环控制等。内环一般为电流环,外环则为转速环。其响应时间常数不同,电流环响应时间要更短一些,一般转速环时间常数是电流环时间常数的几十倍,而两个控制环的采样时间可以采用不同值,一般转速环的采样时间是电流环采样时间的3~10倍。
电流环时间常数由电机电磁过渡过程来确定,不同电机有不同的值,直流电机的电磁时间常数一般大于异步电机的时间常数,而永磁同步电机的电磁时间常数一般要小于异步电机的时间常数。
在伺服控制系统中,小的电流环采样时间能减小系统的转矩脉动,获得更好的低速性能,提高系统的稳定性,达到更高的综合性能。另一方面,小的电流环采样时间要求系统硬件、软件的执行周期要短,不能有过于复杂的控制算法,会有较高的硬件成本,软件编制也要求精打细算,以减少时间开支。
因此,确定系统的电流环采样时间是确定整个系统构成的关键,需要综合考虑系统所要求的性能指标以及系统成本,必要时做一些折中处理。例如在实际系统中,考虑到对性能的要求,确定系统的电流环采样时间是100μs,转速环采样时间为电流环采样时间的10倍,即1ms。
转速环主要完成电机测速、反馈调节以及监控管理工作。速度传感器由增量式光电编码器构成,其参数为2500脉冲/r。系统主电路开关器件采用功率器件IG-BT,以简化电路,获得较高的开关频率。图6-14是系统结构框图。
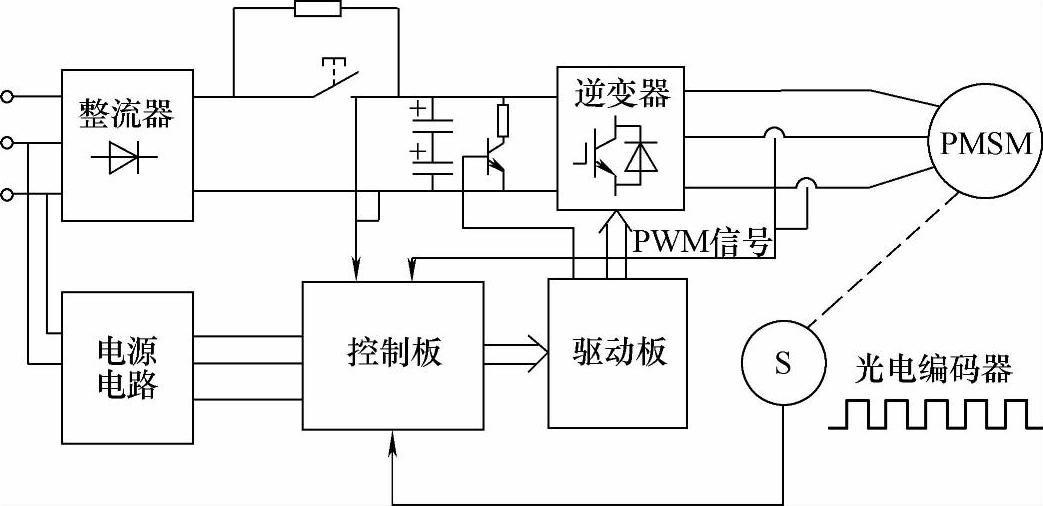
图6-14 系统结构框图(https://www.daowen.com)
系统软件从功能上可以分为监控程序、转速环程序和电流环程序。软件的关系结构如图6-15、图6-16所示。
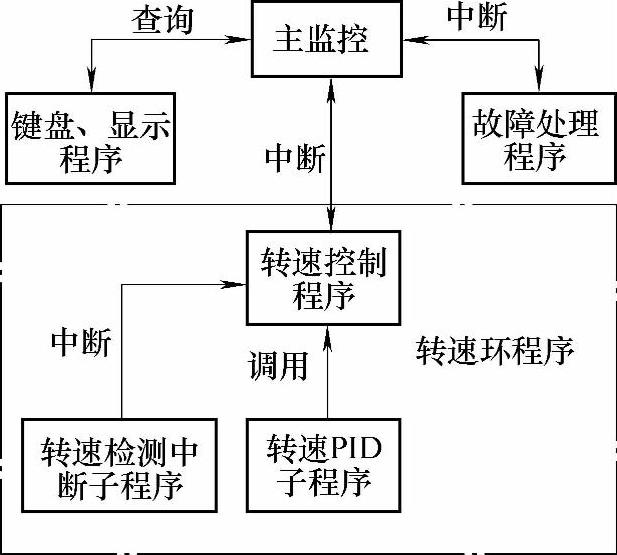
图6-15 外环(监控程序和转速环)软件结构
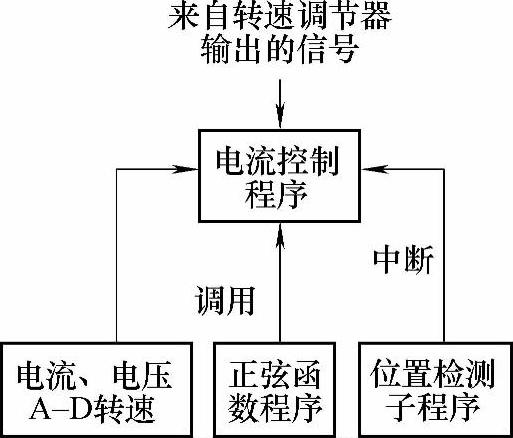
图6-16 内环(电流环)软件结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




