在模拟直接转矩控制系统中,定子磁链和电磁转矩的控制是由两个双位模拟调节器来调节完成的。在全数字化控制系统中,由于采样时间的延迟作用存在,转矩和磁链的控制存在较大的误差,为减少该误差,可令滞环控制器的宽度等于零,即变为纯粹的比较器。调节器的输出是由输入误差信号的符号来决定的,其结构如图5-7所示。
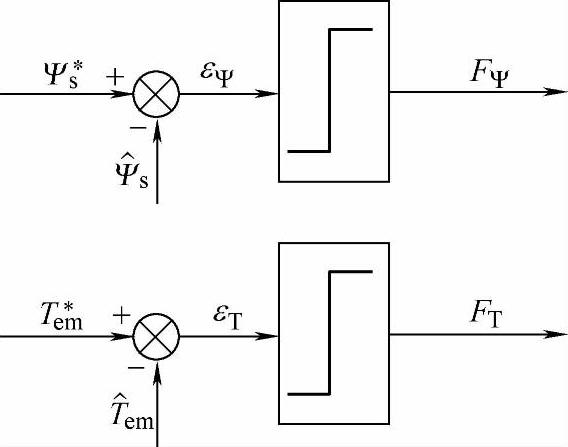
图5-7 磁链、转矩调节器
图5-7中,Ψs*、Te*m为磁链调节器和转矩调
节器的给定值; 、
、 为磁链调节器和转矩调节器的反馈值,是从电机模型计算出来的值。
为磁链调节器和转矩调节器的反馈值,是从电机模型计算出来的值。
定义输入信号误差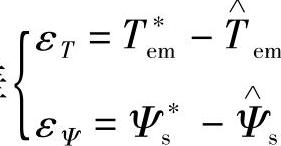
调节器输出标志
经过前几节的分析,将磁链和转矩两个调节器结合起来,共同控制逆变器的输出矢量,就既能保证电机的磁链在给定值附近变化,又能使电机的输出转矩快速跟随指令值,从而使系统获得高动态性能。下面给出具体的电压矢量选择方法。
为表述方便,先将电压空间矢量分布的平面划分为图5-8所示的6个扇区,6条虚线代表各个扇区间的分界线,每个扇区包含一个非零电压矢量,并且是该扇区的角平分线,暂称作“扇区主矢量”。对每个扇区编号,依次为1~6,同时为实际系统中存表或计算方便,对相应各扇区主矢量进行重新编号,分别对应u1~u6,零矢量仍记为u0和u7。
首先,计算磁链的幅值和相位。对式(5-27)离散化并写成α、β分量的形式,得
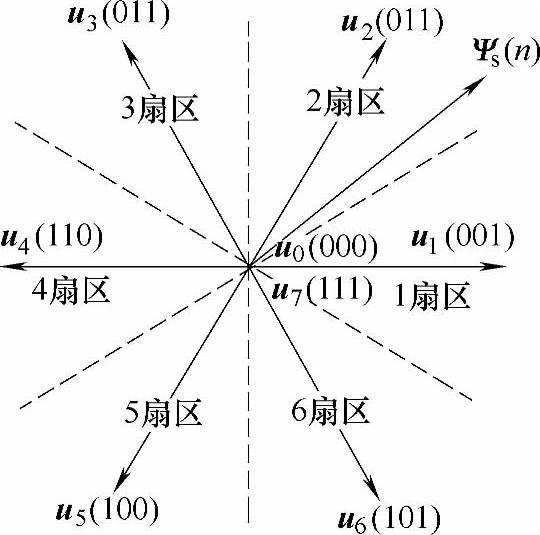
图5-8 矢量扇区图

磁链的幅值为
 (https://www.daowen.com)
(https://www.daowen.com)
磁链的相位为

转矩的计算由式(5-5)离散化后得到,有

可以看出,整个计算非常简单,只需知道定子电阻、电压和电流的检测量就足够了。然后,就可以按照前几节所述的转矩和磁链的控制原理,根据磁链和转矩调节器的输出来选择下一周期要施加的电压矢量。具体的选择方法见表5-1。
表中,u0或u7的选择应根据最少开关次数的原则进行。
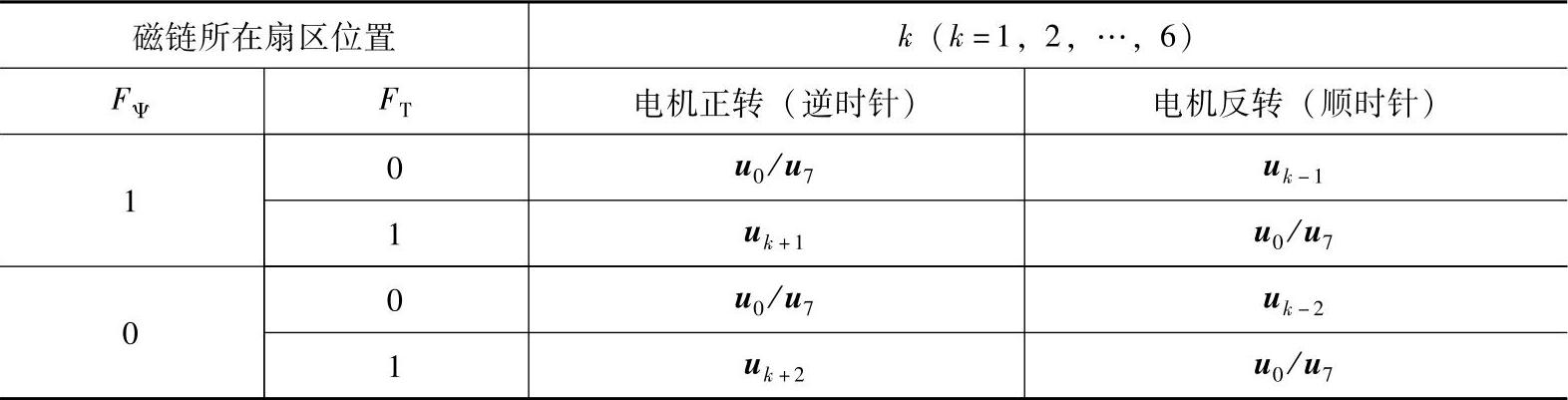
在实际控制方案中,矢量的选取可以采用上述查表的方法,也可以采用如表5-3中所示的计算方法。观察表5-1和表5-2,不难得到表5-3所示的一般形式的矢量选择方法。
表5-1 直接转矩控制策略中电压矢量选取(一)(逆时针旋转)
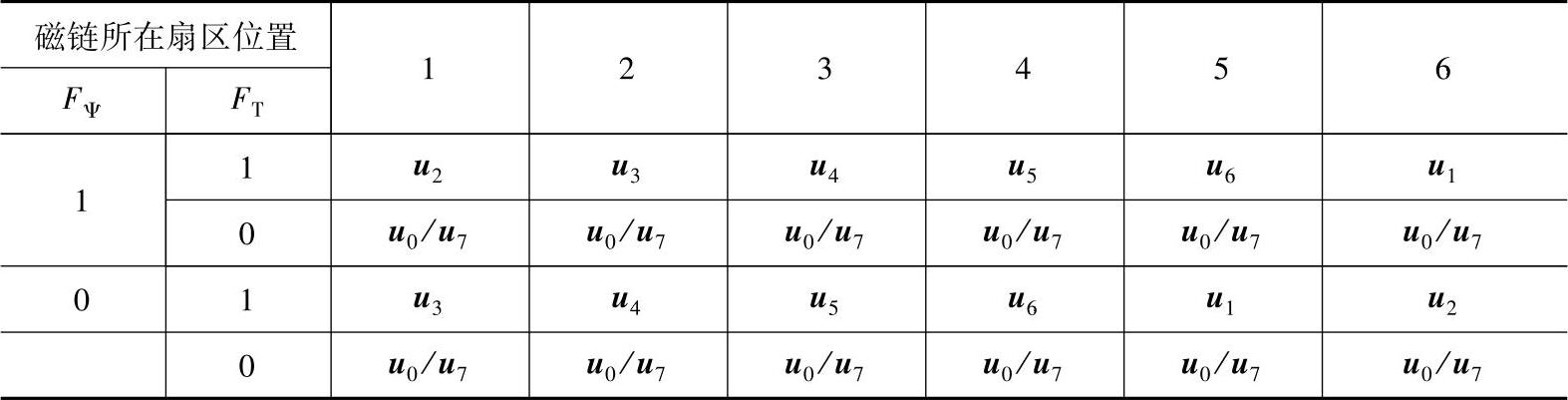
表5-2 直接转矩控制策略中电压矢量选取(二)(顺时针旋转)
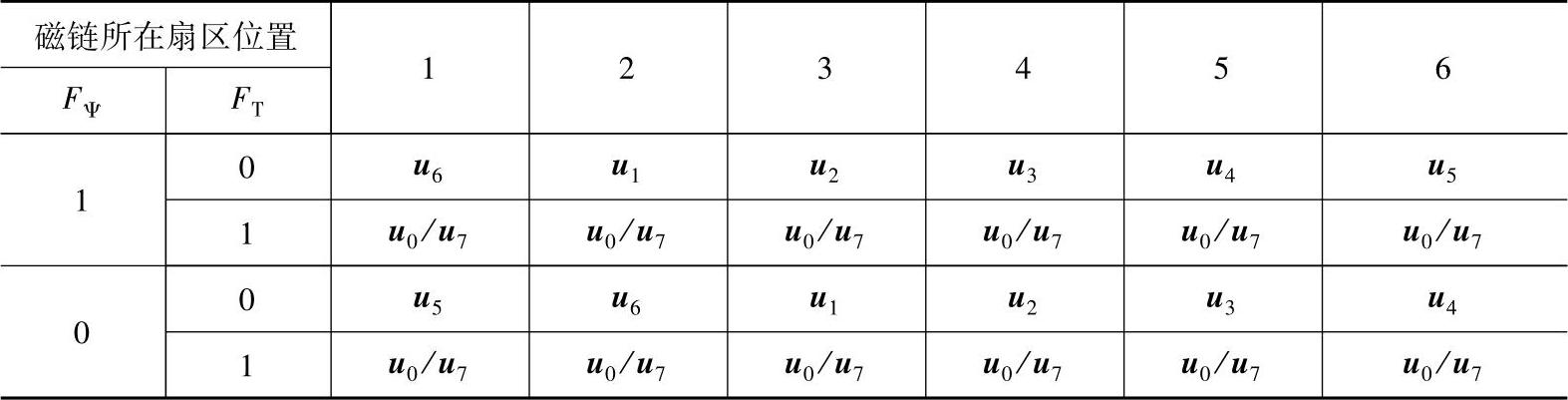
表5-3 直接转矩控制策略中电压矢量选取(一般形式)
值得一提的是,在上述表中,当需要减小转矩时,都选择了零矢量,而没有考虑磁链调节器的输出。其原因在于:①磁链本身的波动很小,这一点在前面的分析中已经得到了证明,一两拍内不控,不会对磁链的轨迹造成多大影响。②如果选择滞后矢量,虽然兼顾到磁链的控制,但对于转矩的控制来说,施加的结果造成转矩波动变大,从而使电流和转速的波动变大,影响了系统的稳态性能。所以,在直接转矩控制系统中,一般来说,应优先考虑转矩。但是,当定子磁链偏离指令值过大或尚未建立磁场时,就不能优先考虑转矩了。通常的做法是,在磁链偏离指令值过大时,优先考虑磁链的控制。当磁链比指令值小很多时,可以采用与磁链(位于k扇区)处于同一扇区的电压矢量(uk),使磁链尽快增加;若磁链比指令值大很多时,可以采用与磁链相隔两个扇区的矢量(uk+3),使磁链尽快减小。当磁链的幅值到达一定区域时,再优先考虑转矩。当然,在整个控制过程中,都要考虑转矩和电流的限幅。通过这样的控制策略,可以获得较好的系统性能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






