在本节中,将结合一个转子磁场定向矢量控制系统的实例,说明如何应用模拟系统中已经成熟的工程设计方法(见附录B)进行调节器的设计。在下节中,将直接应用第1章中介绍的方法,实现系统的数字化控制。
1.转子磁场定向矢量控制系统传递函数描述
由转子磁场定向矢量控制方程式(4-5)~式(4-15)可以求得

式中,τs=Ls/Rs;τr=Lr/Rr。
同理可得

注意到式(4-36)与式(4-37)中存在和ωs有关的旋转电动势耦合项,令
可见
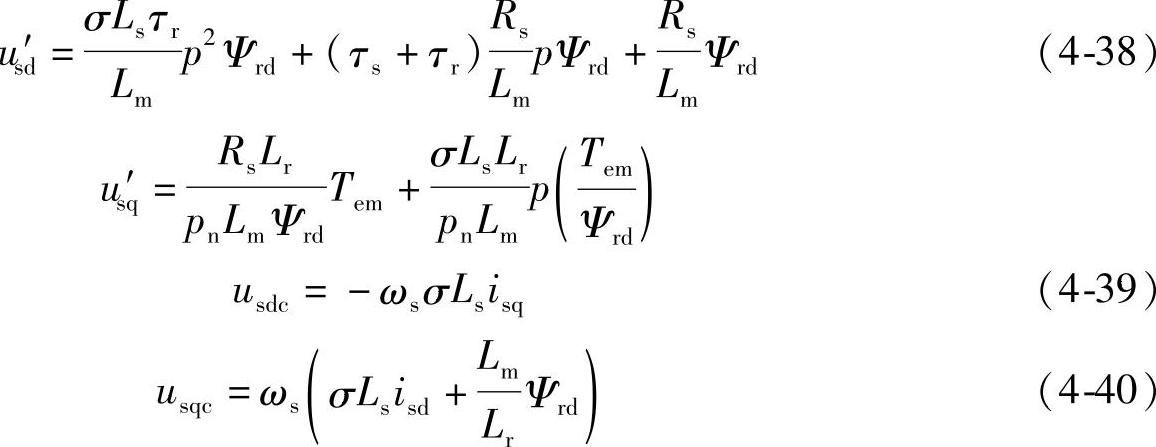
将d轴磁链和电压的关系写成传递函数形式为

考虑到矢量控制过程中保持Ψrd恒定,因而在式(4-39)中可认为Ψrd=const,则写成传递函数形式为
令 得
得
图4-6所示为一个转子磁场定向矢量控制系统的传递函数框图。
2.转子磁场定向矢量控制系统调节器设计
矢量控制系统是一个多环控制系统,对本系统来说,转矩环和磁链环属于内环,转速环属于外环。由本节的介绍,知道由转速环、转矩环和磁链环的开环传递函数构成的系统并不是典型系统,需要配上适当的调节器才能将它们校正成典型系统,一般可采用PI调节器,将内环(转子磁链环和转矩环)校正为典型Ⅰ型系统,以提高其动态响应速度,将转速环校正为典型Ⅱ型系统,以提高其抗干扰能力。设计的一般原则是:从内环开始,一环一环地逐步向外扩展。在这里,先从转矩和磁链环入手,首先设计好这两个环节的调节器,然后把转矩环看作是转速调节系统中的一个环节,再设计转速调节器,设计过程中认为电机各参数为已知,并认为磁链Ψrd和转矩Tem已观测得到。
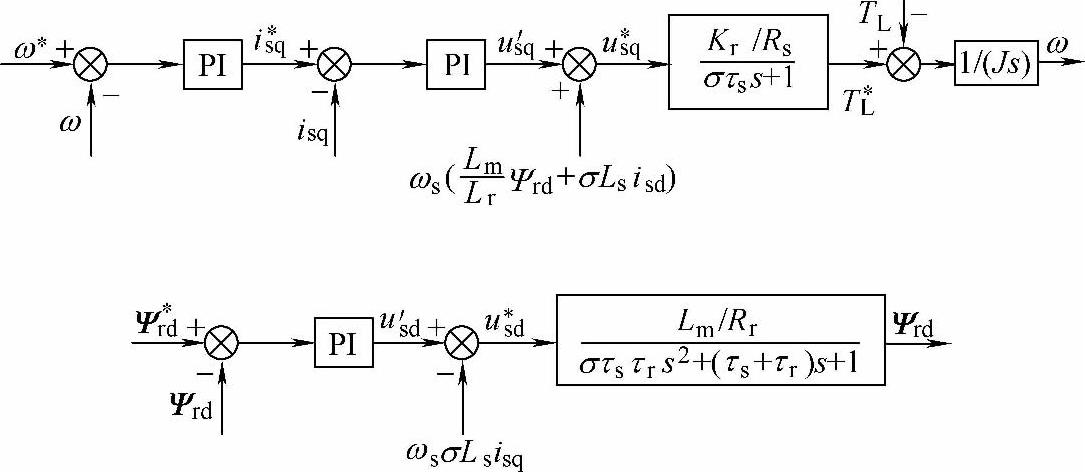
图4-6 转子磁场定向矢量控制传递函数框图
(1)磁链调节器的设计 由式(4-41)开环传递函数得到图4-7的磁链闭环控制框图。磁链控制环节的一项重要作用就是保证转子磁链在动态过程中维持恒定,尤其是不希望磁链饱和,即在突加控制作用时不希望有超调或超调量越小越好。因而一般可按照典型Ⅰ型系统来设计。
转子磁链环的开环传递函数见表(4-41),若令
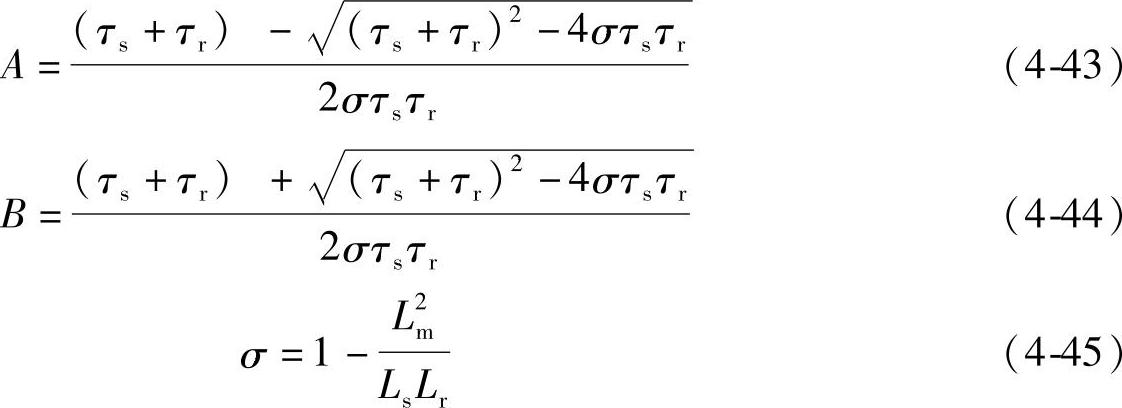
则式(4-41)可表示为

这是一个二阶系统,但不是典型Ⅰ型系统。若要将之校正为典型Ⅰ型系统,可以引入一个PI调节器[Kp(τs+1)/(τs)],其结构图如图4-7所示。

图4-7 引入PI调节器的转子磁链闭环结构
由式(4-43)、式(4-44)可知,A>0,B>0,且A<B,也就是说1/A>1/B,所以τ取1/A和1/B中较大的一个,即τ=1/A,令

则校正后的转子磁链环开环传递函数为

即转子磁链环被校正成了典型Ⅰ型系统。
由附录B的分析可知,要达到二阶“最优”模型的动态性能,须满足ξ=0.707、KT=0.5,也就是说,须满足
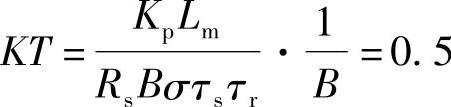
经过整理,得

当然,在具体的系统调试中,计算得到的PI调节器参数一般并不是最终的结果。它们只是给出了参数的大致范围。在开始调试时,以上述计算结果作为PI调节器的初始参数,然后需要对Kp和Ki进行微调。在微调过程中,一般是先令其中一个参数不变,调节另一个参数使系统性能达到一个最优点,然后将第二个参数不变,调节第一个参数,使系统性能达到新的最优点。重复这一过程,直至转子磁链环性能满足设计要求。
这样就可以得到转子磁链环的示意图如图4-8所示。
图4-8中,定子电压磁链分量us′d可以由转子磁链指令值Ψr*d和估计值Ψrd之间的差值经过PI调节器得到,即

考虑到q轴分量isq的影响,在us′d中加入补偿量usdc

从而得到最终的定子电压矢量磁链分量指令值us*d。这里为简化起见,转子磁链和电磁转矩采用了参考值来代替实际值,通过仿真实验可知,这样做的结果只带来很小的误差。
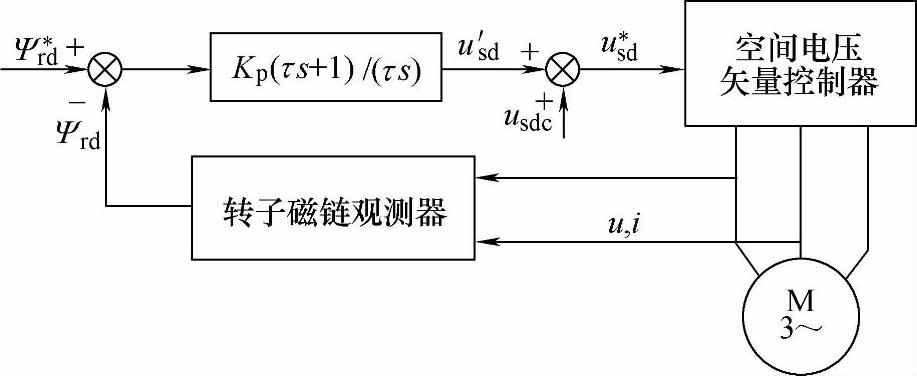
图4-8 转子磁链环闭环示意图
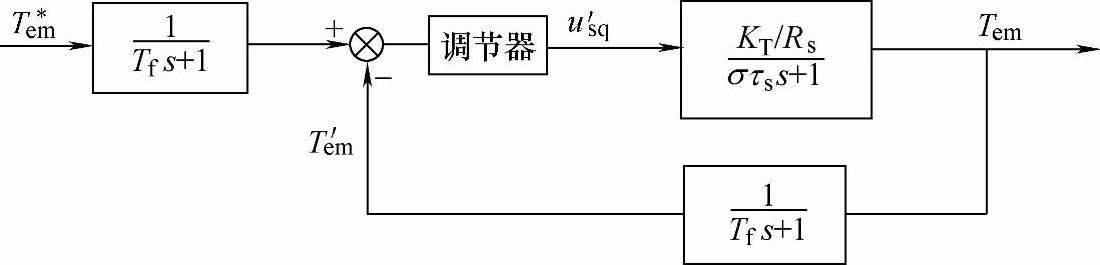
(2)转矩调节器的设计 转矩环是转速环的内环,应该先于转速调节器设计。转矩环的开环传递函数见式(4-42),由于转矩信号滤波环节的存在,给反馈信号带来了延迟,为了平衡这一延迟作用,在给定信号通道中,加入相同时间常数的一阶惯性环节,称作给定滤波环节,其目的是提供恰当的配合,从而带来设计上的方便。反馈滤波环节的滤波时间常数Tf可根据需要而定,一般来说,Tf<στs。转矩闭环调节的控制动态结构如图4-9所示。
 (https://www.daowen.com)
(https://www.daowen.com)
图4-9 转矩闭环调节的控制动态结构
将给定滤波环节和反馈滤波环节等效地移到环内,从而得到转矩环的开环传递函数

这是一个二阶系统,但不是典型Ⅰ型系统,同样,引入一个PI调节器[Kp(τs+1)/(τs)],将转矩环校正为典型Ⅰ型系统,如图4-10所示。
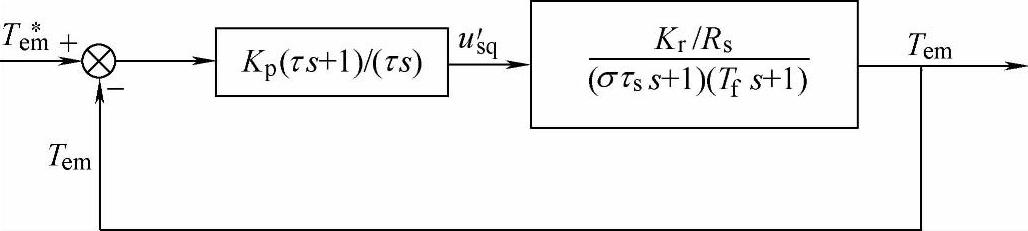
图4-10 加入PI调节器进行校正的转矩环
由于Tf<στs,所以令
τ=στs (4-53)并且

则校正后的转矩环开环传递函数为

从而使转矩环变为典型Ⅰ型系统。
同样,要达到二阶“最优”模型的动态性能,须使ξ=0.707、KTf=0.5,从而得到
所以

同样,这样计算出来的Kp和Ki只是给出了PI调节器参数的一个大致范围,在实际进行系统调试时,应按照转子磁链调节器参数设计一节中介绍的方法进行微调。
这样就可以得到转矩环闭环的示意图如图4-11所示。
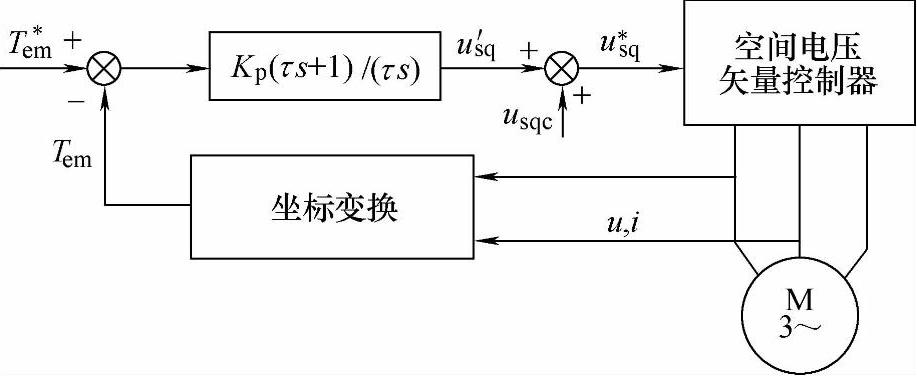
图4-11 转矩环闭环示意图
下一指令周期的定子电压转矩分量us*q可以由转矩指令值与估计值之间的差值经过PI调节器得到,即

考虑到d轴Ψrd的影响,在us*q中加入补偿量usqc

由此得到最终的电压矢量转矩分量指令值us*q
转矩环是转速环的内环,确定了转矩环中PI调节器的参数以后,就可以得出转矩环的闭环传递函数为

当小的高阶项被忽略时,上式可以简化为

(3)转速环PI调节器参数设计 一般来说,转速环应该校正成典型Ⅱ型系统,因为由图4-12可以看出,在负载扰动作用点以后,已经有了一个积分环节。为了实现转速无静差,还必须在扰动作用点以前设置一个积分环节,因此需要设计成Ⅱ型系统。再从动态性能上看,调速系统需要有较好的抗扰性能,典型Ⅱ型系统恰好能满足这一要求。至于典型Ⅱ型系统阶跃响应超调量大的问题,那是在线性条件下的设计数据,实际系统由于调节器的饱和作用会使超调量大大降低。
在转速辨识反馈和转速给定通道中,分别设置了转速反馈滤波环节和给定滤波环节,并用转矩环的近似传递函数代替转矩环,从而得到转速环闭环示意图如图4-12所示。
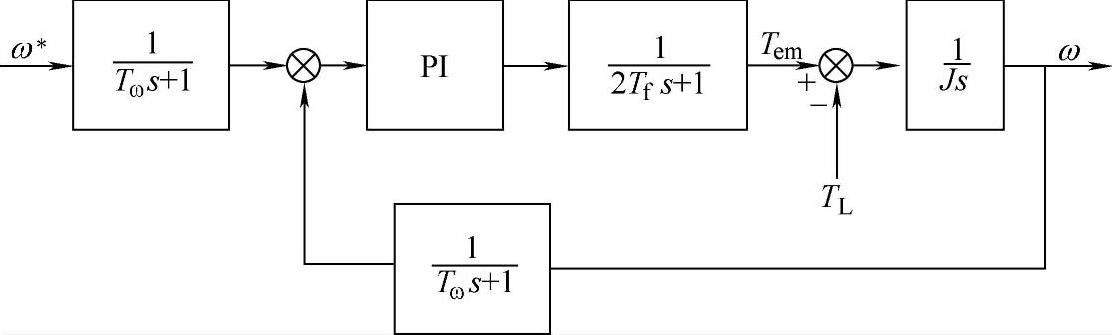
图4-12 转速环闭环示意图
图4-12中,Tω为转速检测滤波环节时间常数,把给定滤波和反馈滤波环节等效地移到环内,再把时间常数为Tω和2Tf的两个小惯性环节合并起来,近似成一个时间常数为T∑=Tω+2Tf的惯性环节,则转速环结构可进一步简化成如图4-13所示。
这样,应用PI调节器,把转速环校正成了典型Ⅱ型系统,其开环传递函数(不考虑负载扰动)为
其中,PI调节器的传递函数为
按照典型Ⅱ型系统的参数选择方法,有

式中,中频带宽h=τ/T∑的选择要由系统对动态性能的要求来决定。如无特殊要求,一般以选择h=5为好。
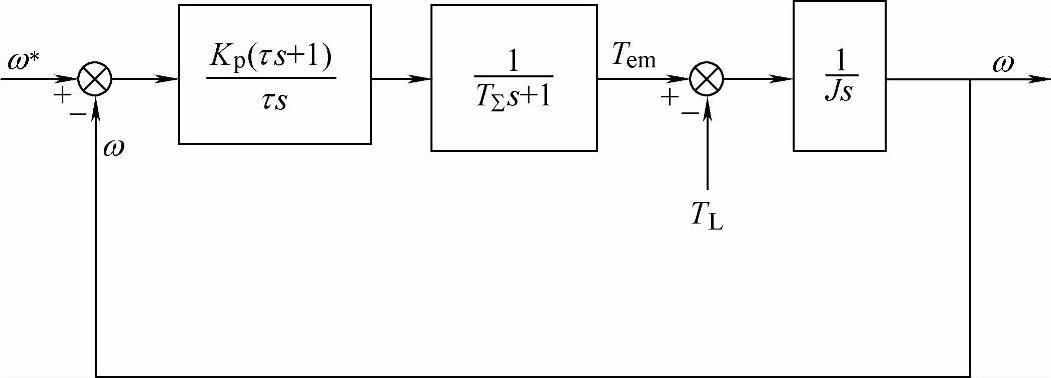
图4-13 简化的转速环示意图
到此,本系统的三个闭环调节器都设计出来了。整个系统的结构如图4-14所示。值得一提的是,按上述方法设计多环控制系统时,外环响应速度受到限制,但是每个环本身都是稳定的,对系统的组成和调试工作非常有利。总之,多环系统的设计思想要以稳为主,稳中求快。
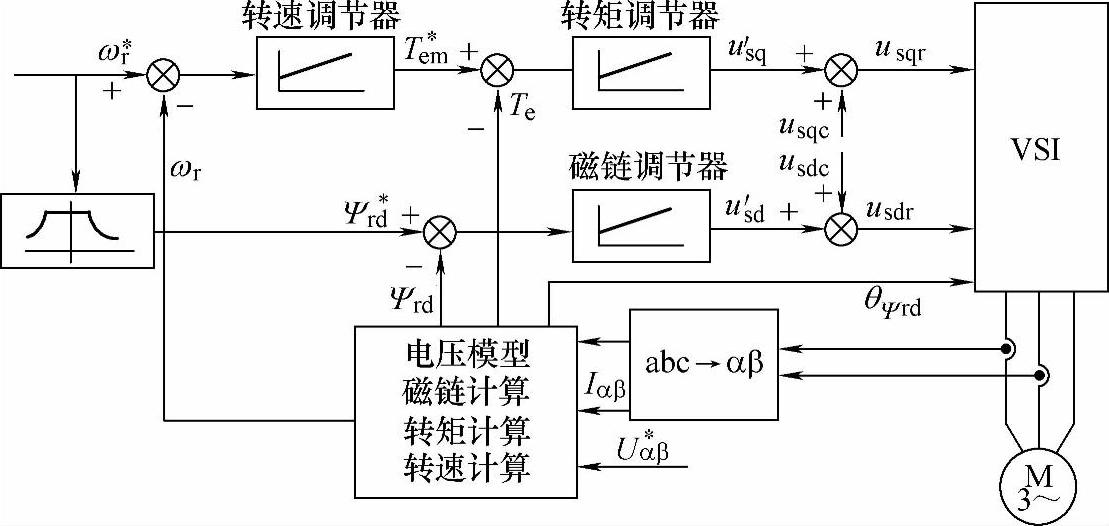
图4-14转 子磁场定向的无速度传感器异步电机矢量控制系统
另外,由于设计过程中的一些近似,PI调节器参数可能需要在现场微调,这时需要注意Kp、Ki和调节器性能之间的关系,关于PI调节器参数对性能的影响可参考第1章。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







