上述磁场定向矢量控制的优点是系统达到了完全的解耦控制,但缺点是系统的控制需采用旋转矢量变换,结构比较复杂。如果使参考坐标系的d轴和定子电压矢量的方向重合,则可以得到在过渡过程中也保持磁链恒定的动态控制规律,即电压定向矢量控制。此时电压方程为
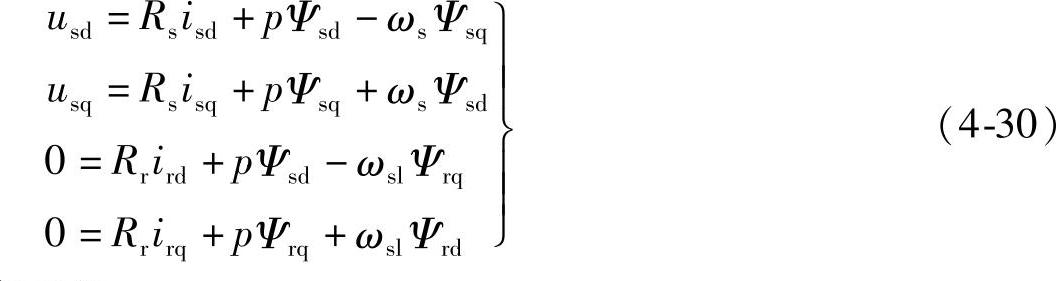
即磁链方程和转矩方程保持不变。
在选定的坐标系中, ,usq=0,其中us是定子电压有效值。我们希望不论转矩及电机负载如何变化,磁链始终保持恒定,即
,usq=0,其中us是定子电压有效值。我们希望不论转矩及电机负载如何变化,磁链始终保持恒定,即 常数。这样做可以使得电机工作在额定磁链下,从而有效地利用电机的容量,并同时避免电机磁路饱和。
常数。这样做可以使得电机工作在额定磁链下,从而有效地利用电机的容量,并同时避免电机磁路饱和。
现对关系式 常数”进行微分,得
常数”进行微分,得 ,则将式(4-30)中的前两个式子分别乘以
,则将式(4-30)中的前两个式子分别乘以 及
及 相加可以得到
相加可以得到

同理,令转子磁链为恒定值,可以得到 。将式(4-30)的后两个式子分别乘以
。将式(4-30)的后两个式子分别乘以 及
及 再相加,即可得
再相加,即可得

将上面所述电机模型中的磁链方程式中的转子量都用定子量代替,并代入式(4-31)、式(4-32)中后,便可以推导得以下规律:(www.daowen.com)

式中,Ψsref为给定的定子磁链有效值;Is为定子相电流有效值,且 。以上即为在电机过渡过程中也保持磁链恒定的动态控制规律,即电压定向矢量控制规律。
。以上即为在电机过渡过程中也保持磁链恒定的动态控制规律,即电压定向矢量控制规律。
由此可以得到定子电压定向矢量控制框图,如图4-5所示。从图中可以看到,整个系统的结构比传统的矢量控制系统大大简化了。它不需要复杂的坐标变换和反变换即可实现速度闭环控制。其仿真和实验结果证明,前述控制规律不但在稳态,而且在各种动态过程中也能有效地控制磁通,并使其保持恒定。图中的转矩环对系统的动态响应性能作用较大,转矩的观测方法可由估测到的定子磁链及定子d、q轴电流通过下式计算得到:
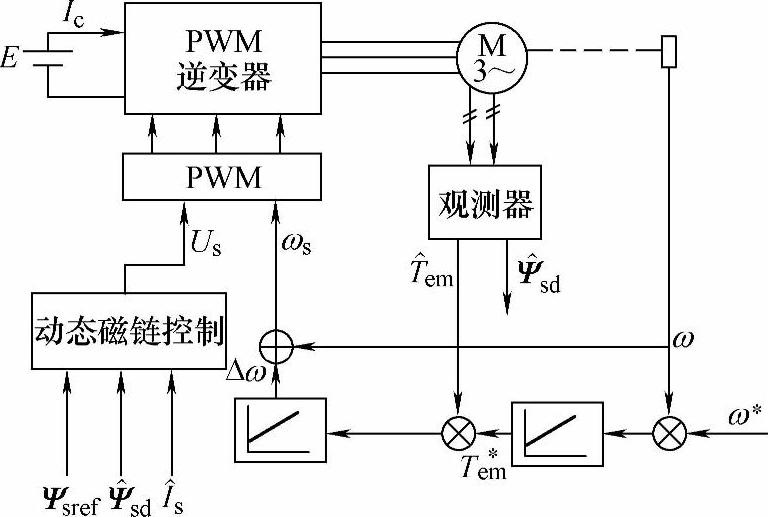
图4-5 定子电压定向矢量控制框图

在上述系统中,定子磁链观测器的实现是颇为关键的。在实际实现时,由于定子电压、电流均为可测量,通过它们可较直接地(不用进行坐标变换)构成磁链观测器。另外,转矩的观测精度也取决于定子磁链观测的精度。
上述几种方法是目前应用较多、比较成熟的方法。其中,转差频率矢量控制方法仅考虑转子磁链的稳态过程,动态性能较差,但系统结构最简单,能满足中低性能工业应用的要求,因而应用范围也较广。转子磁场定向、气隙磁场定向、定子磁场定向三种矢量控制方法均属于高性能调速方法,其中又以转子和定子磁场定向方法应用较多。这三种方法各有优缺点,转子磁场定向能做到完全解耦,而气隙磁场定向、定子磁场定向方法中均含有耦合项,需增加解耦控制器。但转子磁场检测受转子参数影响大,一定程度上影响了系统性能,气隙磁链、定子磁链的检测基本不受转子参数影响。在处理饱和效应时,应用气隙磁场定向更为适宜,而对于大范围弱磁运行情况,采用定子磁场定向方法当为最佳选择。因此,在实际系统控制过程中,要针对不同的运行情况与要求选择不同的矢量控制方案。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







