【摘要】:由此应运而生的定子磁场定向矢量控制方法便成为近年来国内外研究的热点课题。这种控制方法是将参考坐标的d轴放在定子磁场方向上,此时,定子磁链的q轴分量为零,矢量控制方程变为从式可以看出,如果保持定子磁链Ψsd恒定,转矩直接和q轴电流成正比,因此,瞬时的转矩控制是可以实现的。此外,定子磁场定向控制使定子方程大大简化,从而有利于定子磁链观测器的实现。
通常,转子磁链的检测精度受电机参数影响较大;气隙磁链虽可利用磁链传感线圈或霍尔元件直接测量,精度较高,但一般情况下,不希望附加这些检测元件,而是希望通过机端检测的电压、电流量计算出所需磁链,同时降低转子参数对检测精度的影响。由此应运而生的定子磁场定向矢量控制方法便成为近年来国内外研究的热点课题。
这种控制方法是将参考坐标的d轴放在定子磁场方向上,此时,定子磁链的q轴分量为零,矢量控制方程变为
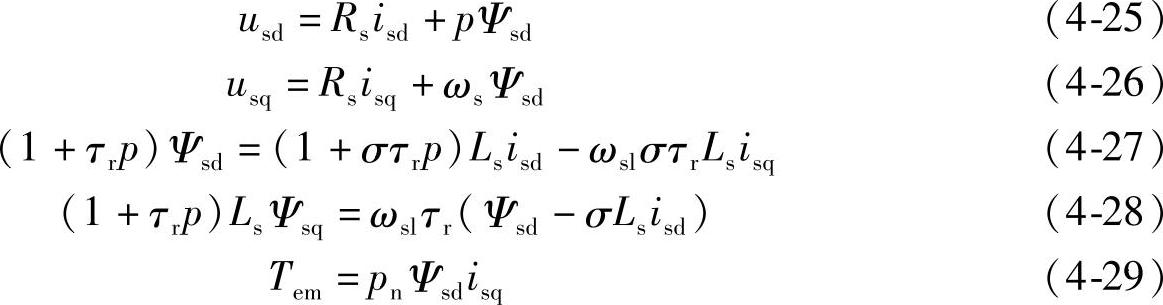
从式(4-29)可以看出,如果保持定子磁链Ψsd恒定,转矩直接和q轴电流成正比,因此,瞬时的转矩控制是可以实现的。此外,定子磁场定向控制使定子方程大大简化,从而有利于定子磁链观测器的实现。然而在利用式(4-27)和式(4-28)进行磁链控制时,不论采用直接磁链闭环控制,还是采用间接磁链闭环控制,都用以消除耦合项的影响。因此,同气隙磁场定向一样,往往需要设计一个解耦器,使isd与isq解耦。它的基本控制框图如图4-4所示。(https://www.daowen.com)
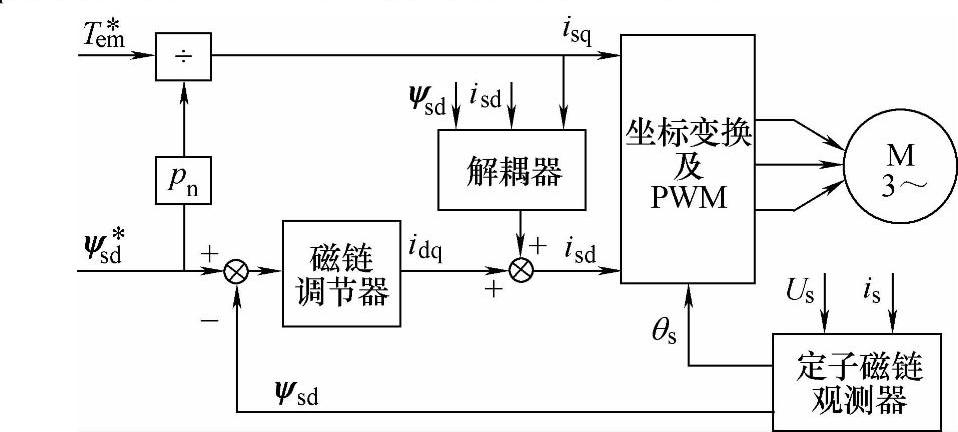
图4-4 定子磁场定向矢量控制基本框图
在磁链闭环控制系统中,这种控制方法在一般的调速范围内可利用定子方程作磁链观测器,非常易于实现,且不包括对温度变化非常敏感的转子参数,加解耦控制后,可达到相当好的动静态性能,同时控制系统结构也相对简单。然而低速时,由于定子电阻压降占端电压的大部分,致使反电动势测量误差较大,导致定子磁链观测不准,影响系统性能。这种情况下,可采用转子方程作磁链观测器,不过此时观测模型较为复杂。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






