鉴于直接转子磁场定向矢量控制系统较为复杂、磁链反馈信号不易准确获取的缺点,日本学者Yamamura、Nabae等人借鉴了矢量控制的思想和方法,应用稳态转差频率,得到转子磁场的位置,即转差频率矢量控制的方法。
该控制原理的出发点是,异步电机的转矩主要取决于电机的转差频率。在运行状态突变的动态过程中,电机的转矩之所以出现偏差,是因为电机中出现了暂态电流,它阻碍着运行状态的突变,影响了动作的快速性。如果在控制过程中,只要能使电机定子、转子或气隙磁场中有一个始终保持不变,电机的转矩就和稳态工作时一样,主要由转差率决定。按照这个想法,在转子磁链定向矢量方程中,如果仅考虑转子磁链的稳态方程式(4-13),就可以从转子磁链直接得到定子电流d轴分量的给定值,再通过对定子电流的有效控制,就形成了转差矢量控制,避免了磁链的闭环控制。这种控制方法也称为间接磁场定向矢量控制,不需要实际计算转子磁链的幅值和相位,用转差频率和量测的转速相加后积分来估计磁链相对于定子的位置,结构比较简单,所能获得的动态性能基本上可以达到直流双闭环控制系统的水平,得到了较多的推广应用,其控制基本框图如图4-3所示。此时
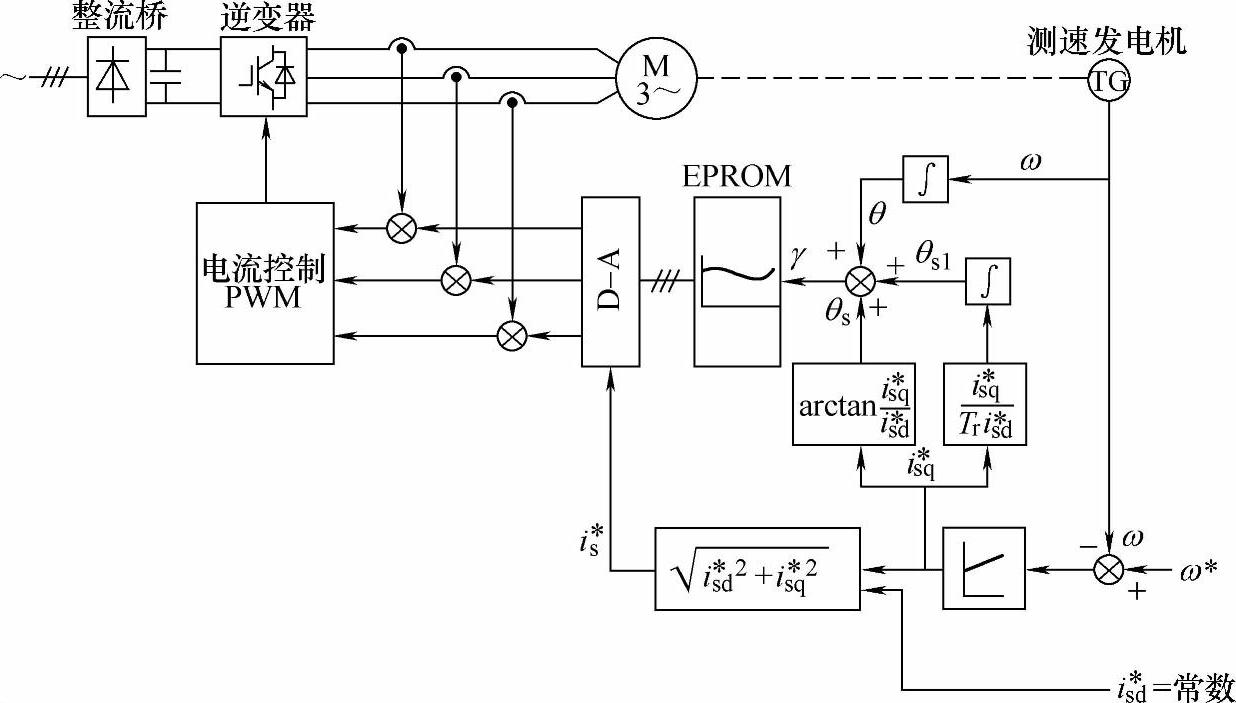
图4-3 转差频率矢量控制基本框图
 (https://www.daowen.com)
(https://www.daowen.com)
这种原理的控制算法为
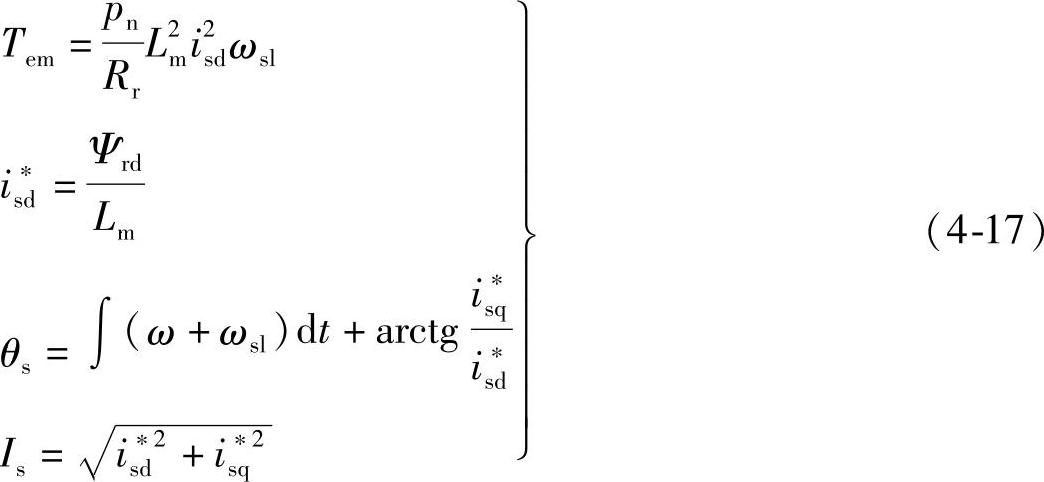
它的基本思想是以定子电流的幅值、相位和频率为控制量,保持电机的旋转磁场大小不变,而改变磁场的旋转速度,以此控制电机,可得到无延时的转矩响应。这种方法可以低速稳定运行,因而在许多接近零速运行的系统中广泛采用这种方法。但由于矢量控制方程没变,系统性能同样受转子参数变化的影响。
间接磁场定向控制中,对转子时间常数比较敏感,当控制器中这个参数不正确时,计算出的转差频率也不正确,得出的磁链旋转角度将出现偏差,即出现定向不准的问题。磁链和转矩瞬时误差表现为一个二阶暂态过程,其衰减时间常数为τr,振荡频率为计算出的错误的转差频率。由于τr较大,因而振荡衰减会比较慢。而且不正确的稳态转差也将导致稳态的转矩误差,严重影响了系统性能,同时还会引起电机的额外发热和效率降低。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






