对于一般电机调速系统而言,从转矩到转速近似为一个积分环节,其积分时间常数由电机和负载的机械惯量决定,为不可控量,因此转矩控制性能的好坏直接关系到一个调速系统的动静态特性。
交流电机的转矩一般和定转子旋转磁场及其夹角有关。因此,要想控制转矩,必先检测和控制磁链。在磁场定向矢量控制系统中,一般把d-q坐标系放在同步旋转磁场上,把静止坐标系中的各交流量转化为旋转坐标系中的直流量,并使d轴与转子磁场方向重合,此时转子磁链q轴分量为零(Ψrq=0)。此时,派克方程可表示为
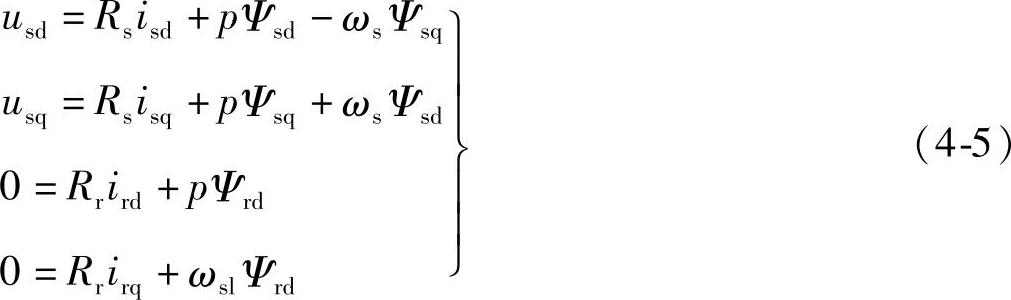
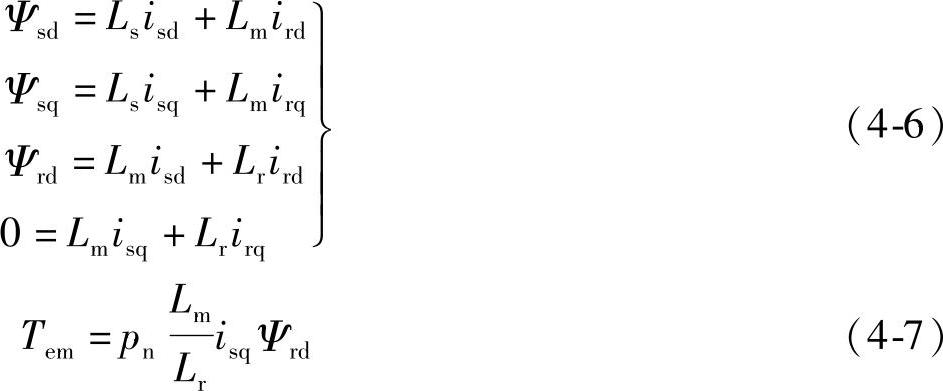
将式(4-6)代入式(4-5),得

由式(4-6)得

将式(4-9)和式(4-10)代入式(4-8)得(https://www.daowen.com)

整理后可得

略去推导过程,同理可得
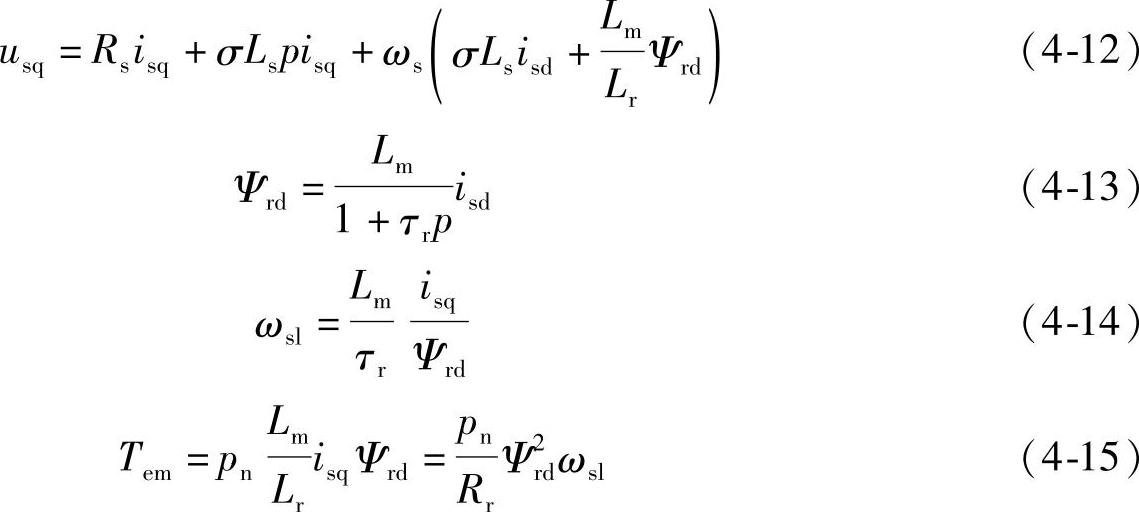
式(4-11)~式(4-15)为转子磁链定向矢量控制方程式。漏磁系数σ=1-L2m/(LsLr);τr为转子时间常数。由式(4-13)不难发现,只需检测定子电流的d轴分量即可观测出转子磁链幅值。由式(4-15)可知,当Ψrd恒定时,电磁转矩和电流的q轴分量或转差成正比,没有最大值限制,通过控制定子电流的q轴分量即可控制电磁转矩。因此,也称定子电流的d轴分量为励磁分量,定子电流的q轴分量为转矩分量。由式(4-11)、式(4-12)可知,在忽略反电动势引起的交叉耦合项以后,可由电压方程d轴分量控制转子磁链,q轴分量控制转矩,控制系统的基本框图如图4-2所示。矢量控制技术最初就是基于这一原理实现磁链和转矩的解耦控制的,目前大多数矢量控制系统仍采用此方法。这种带有转子磁链反馈的矢量控制系统,也称为直接转子磁链定向矢量控制,其优点是系统达到了完全的解耦控制,缺点是磁链闭环控制系统中转子磁链的检测精度受转子时间常数的影响较大,在某种程度上影响了系统的性能。
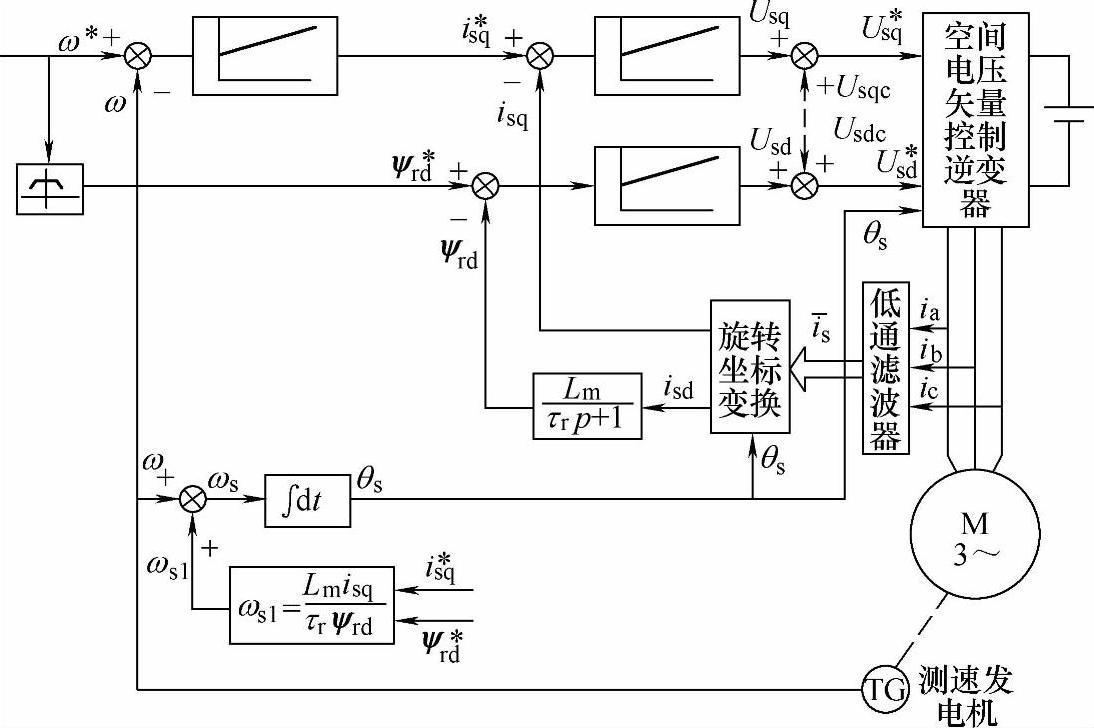
图4-2 转子磁链定向矢量控制基本框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




