交流电机的控制性能主要取决于转矩或者电流的控制质量(在磁通恒定的条件下),为了满足电机控制良好的动态响应,并在极低转速下亦能平稳运转这一要求,经常采用电流的闭环控制,即采用电流SPWM技术。此外,在有源滤波及各种DC-AC电源中,也广泛应用这一技术。目前,实现电流SPWM逆变器的方法很多,大致有PI调节器、滞环控制及无差拍控制几种,均具有控制简单、动态响应快和电压利用率高的特点。
最初的电流反馈控制即采用通常的PI调节器的方法分别控制三相电流,PI调节器的输出和三角波进行比较产生PWM信号,此方法的问题是电流反馈需要加较大的滤波,以保证其谐波成分远比三角波的频率低。此外,电流的相位在矢量控制系统中也很重要,因此提出一些前馈的方法来补偿电流相移[8]。此方法的一种改进即把PI调节器放在d-q坐标系中,这样所需要调节的电流为直流量,调节器的输出经旋转变换变为三相正弦电压,再和三角波比较输出PWM信号。这就变成为典型的电压SPWM技术了。
实现电流控制的另一种常用方法即A.B.Plunkett提出的电流滞环PWM,即把正弦电流参考波形和电流的实际波形通过滞环比较器进行比较,其结果决定逆变器桥臂上下开关器件的导通和关断。这种方法的最大优点是控制简单,可很容易地用模拟器件实现。另外,功率开关器件(小功率MOSFET或IGBT)可以工作在开关频率很高的情况下,响应可以非常快,并对负载及参数变化不敏感,过去曾广泛地应用于小功率高精度的调速或有源滤波系统中,最初直接转矩控制系统中也是采用这种方法来控制磁通和转矩的。但是模拟器件用于系统核心的控制和目前全数字化控制趋势很不协调。此外,这种方法中的滞环宽度一般固定,因此开关频率不固定,随着电机电抗大小及反电动势变换而变化,有时会出现很窄的脉冲和很大的电流尖峰。直流电压不够高或反电动势太大(高速时)或电流太小时,电流控制效果均不理想。后来又提出了很多改进方法,如采用解耦控制以消除各相之间的影响[8]、查表选取电压矢量的方法以优化开关次数[9]、带宽变化或自适应调节以得到大致固定的开关频率[8]等,最后干脆在普通比较器后加一个采样保持器,以一定的采样频率动作,即可得到固定开关频率的Δ调制法[10]。实际上,这样就和全数字化控制非常接近了,因为在采样周期内,电流误差完全失控,所以为了达到一般PWM的效果,采样频率需要非常高,否则由于电流上升和下降的速度不同,将产生不对称脉动。
为了解决在有限采样频率下实现电流的有效控制,J.Holtz和A.Kawamura等人提出了电流预测控制[19]和无差拍控制[20]的思想。所谓电流预测控制就是在采样周期的开始,根据电流的当前误差和负载情况选择一个使误差趋于零的电压矢量,去控制逆变器中开关器件的通断,因此,这是一种典型的全数字化PWM方案(见图3-10)。在电流无差拍控制中还用到了电机模型,根据选取模型的精度不同,派生出几种效果很好的PWM方法。这种控制思想和后面所述磁通闭环PWM是非常类似的,不过这里得到的电压矢量可以是任意的,因为电流和电压之间的关系受电机参数决定,要比磁通和电压之间的关系复杂。最后计算所得任意电压矢量可用合成的方法来求得[18]。在全数字化交流电机控制系统中,这种方法用得越来越多。(https://www.daowen.com)
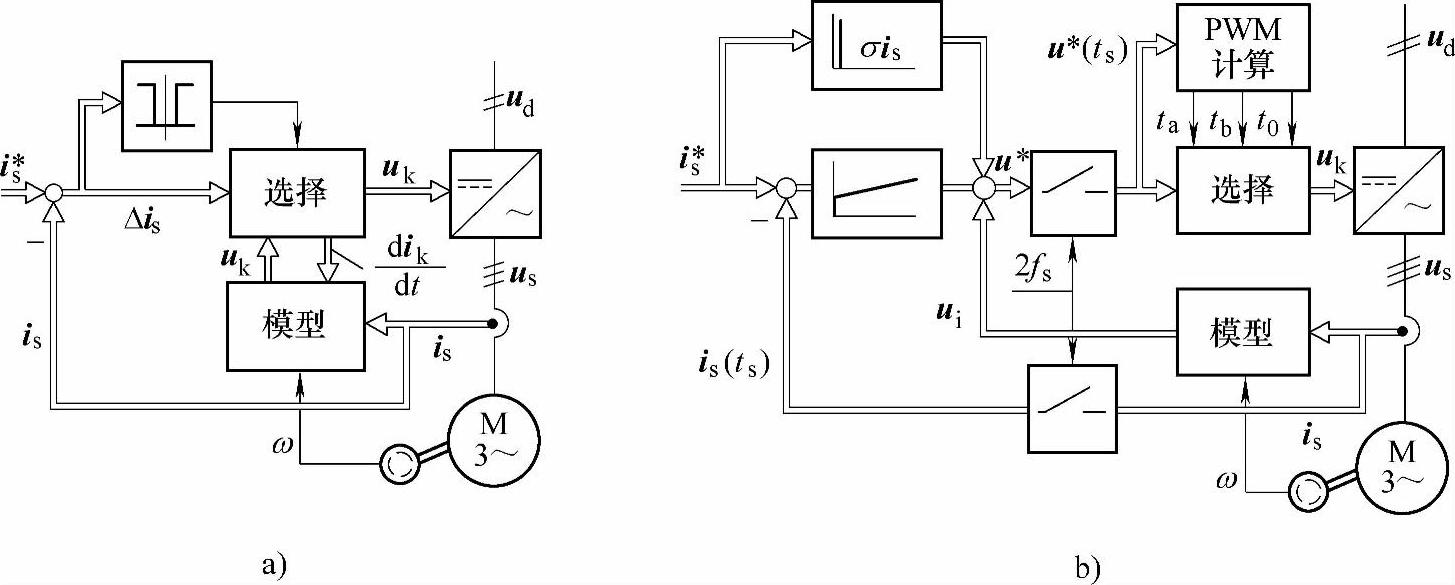
图3-10 电流预测和无差拍控制PWM方案
a)电流预测PWM b)无差拍控制PWM
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






