本节研究在基频以下采用恒压频比带定子压降补偿的控制方式、基本保持磁通Φm恒定时的稳态机械特性,并探讨如何控制压频比才能获得更为理想的稳态性能。
1.恒压恒频时异步电机的机械特性
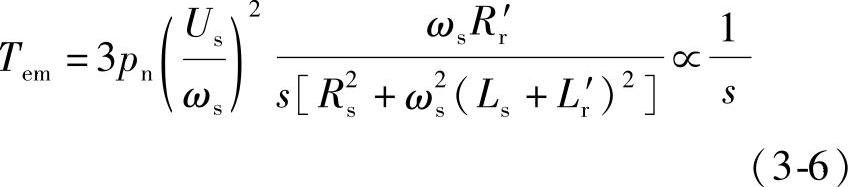
我们知道,当定子电压Us和角频率ωs都为恒定值时,异步电机的机械特性方程为

式中,pn为异步电机极对数;s为转差率。
当s很小时,式(3-4)可以简化为

当s接近于1时,忽略式(3-4)中的分母Rr′时,则该式可以简化为
所以,在s很小时,转矩近似于s成正比;在s接近于1时,转矩近似与s成反比,可以得出机械特性如图3-5所示。
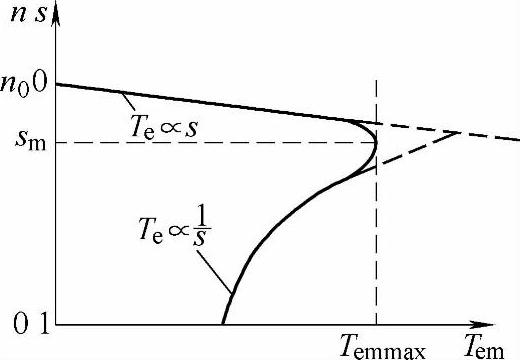
图3-5 恒压恒频异步电机的机械特性
2.电压、频率协调控制的机械特性
异步电机的稳态等效电路如图3-1所示。当异步电机带负载TL稳定运行时,有

式(3-7)说明,当转速n和负载转矩TL一定时,电压Us和角频率ωs可以有多种配合。在电压和频率的不同配合下,机械特性也是不同的,因此可以有不同方式的电压频率控制。下面分别讨论。
(1)恒Us/ωs控制 我们知道,为了近似保持气隙磁通Φm不变,在基频以下需采用恒压频比控制,此时同步转速也随之变化。同步转速为

因此,带负载时的转速降为

在式(3-5)所表示的机械特性的直线段上,可以导出
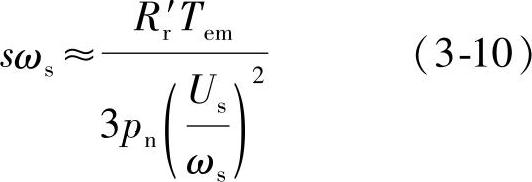
由此可见,当Us/ωs为恒值时,对于同一转矩Tem,sωs是基本不变的,因而Δn也是基本不变的。这就是说,在恒压频比条件下改变频率时,机械特性基本上是平行下移的,如图3-6所示。(https://www.daowen.com)
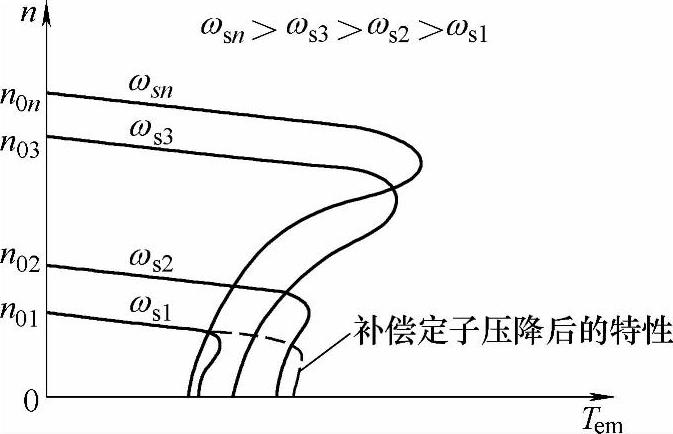
图3-6 恒压频比控制时变频调速的机械特性
另一方面,Us/ωs=恒值时,最大转矩Temmax随角频率ωs的变化关系为
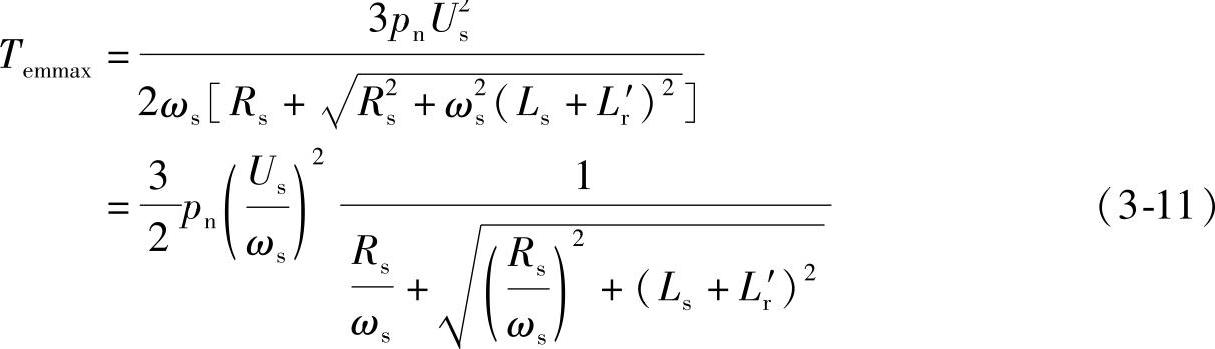
可以看出,最大转矩Temmax随角频率ωs的降低而减小,频率很低时,Temmax太小将限制调速系统的负载能力,这时需要采用定子压降补偿,适当提高Us可以提高负载能力。
(2)恒Eg/ωs控制 如果在电压频率协调控制中,适当地提高电压Us的份额,使它在克服定子压降以后,在基频以下能维持Eg/ωs为恒值,则无论频率高低,每极磁通Φm均为常值。由图3-1所示的等效电路可看出

将上式代入电磁转矩基本关系式并整理得

利用和以前同样的分析方法得到图3-7所示的机械特性。此时最大转矩为

当Eg/ωs为恒值时,Temmax也为恒定,所以,恒Eg/ωs控制的稳态性能是优于恒Us/ωs控制的。
(3)恒Er/ωs控制 如果把电压频率协调控制中的电压Us相应地再提高一些,把转子漏抗上的压降也抵消掉,就得到恒Er/ωs控制。这时

将上式代入电磁转矩的基本关系式中,得

可以看出,这时的机械特性Tem=f(s)完全为一条直线,如图3-7所示。
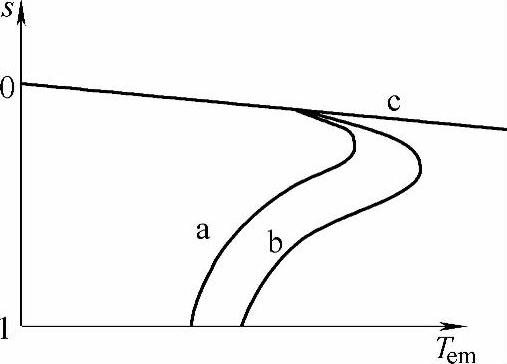
图3-7 不同电压-频率协调控制方式的机械特性
a—恒Us/ωs控 制b—恒Eg/ωs控制 c—恒Er/ωs控制
如何控制变频装置的电压和频率才能获得恒定的Er/ωs呢?气隙磁通幅值是对应于它的旋转感应电动势Eg的,而与转子全磁通的幅值Φrm相对应的是Er,因此只要能按照转子全磁通幅值Φrm=恒值进行控制,就可以获得恒定的Er/ωs。这也就是矢量控制理论的核心,关于矢量控制系统将在第4章中详细介绍。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





