交流电机控制系统大多是通过闭环进行控制的,为了实现闭环控制,首先需要将被控制量(例如电流、电压、转速等)检测出来,然后再反馈给控制系统。检测电路是交流电机控制系统中的重要组成部分,它的设计是否合理,直接关系到装置运行的可靠性和控制的精度。
1.电流检测
电流检测可以采用电阻采样法、电流互感器法或霍尔电流传感器法。
(1)电阻采样法 这种方法的特点是电路简单,无延迟,但精度受温度影响较大,而且缺乏隔离。它适用于低压小电流电路,如图2-13所示。
(2)电流互感器法 这种方法利用变压器原理,方法简单,但只能用来检测交流量(主要是工频),而且有一定的滞后延迟,精度稍差,适用于高压大电流的场合。
(3)霍尔电流传感器法 利用霍尔效应,把电流产生的磁信号转换为电信号,其优点是可以实现隔离,而且交直流均可检测,精度较好,但需要外接电源,价格较高,如图2-14所示。
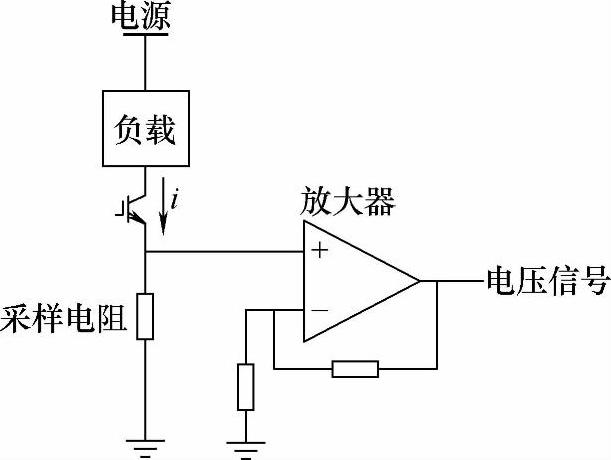
图2-13 电阻采样法
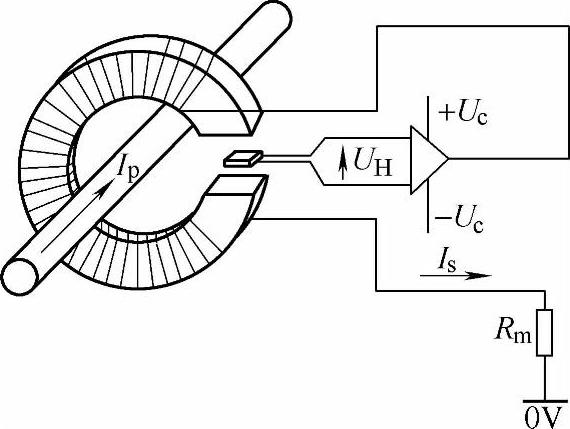
图2-14 霍尔电流传感器法
2.电压检测
电压检测可以采用电阻分压法、电压互感器法或霍尔电压传感器法。
(1)电阻分压法 用电阻网络将高压进行分压,取得按比例降低的低电压。该方法使用简单,但其精度受外界环境(主要是温度)影响较大,且不能实现隔离,如要作为模拟反馈量进行A-D转换,需要加入隔离放大器。该方法适用于低压系统。
(2)电压互感器法 与电流互感器类似,只能用于检测交流电压,适用于高压系统中。
(3)霍尔电压传感器法 原理与霍尔电流传感器法类似,如图2-15所示。
3.转速及位置检测
(1)转速的测量 交流电机控制系统的一个主要应用领域是电气传动控制系统,对转速的检测有两种方法:
1)用测速发电机检测出与转速成正比的电压信号,再反馈给控制系统。测速发电机工作可靠,价格低廉,但存在非线性和死区的问题,且精度较差。
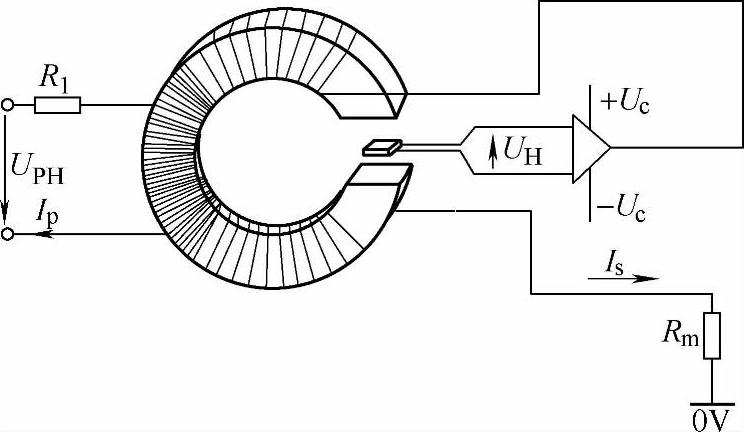
图2-15 霍尔电压检测方法
2)采用脉冲编码器作为检测器件,与传动轴连接,它每转一圈便发出一定数量的脉冲,微机通过计数器对脉冲的频率或周期进行测量,即可间接得到轴上的转速。由于脉冲编码器可以达到很高的精度,且不受外部的影响,可以用于高精度的控制中。(https://www.daowen.com)
采用脉冲编码器检测转速,通常有三种方法:
●M法:即测频法。在一定时间T内,对脉冲编码器输出的脉冲计数,从而得到与转速成正比的脉冲数m,若脉冲编码器每转一圈输出p个脉冲,则测量的转速为n=60m/(pT),n的单位为r/min。该法适用于中高速检测,因为转速越高,一定时间内的脉冲数就越多,分辨率和精度就越高。
●T法:即测周期法。通过测量脉冲编码器发生脉冲的周期来计算轴上的转速的方法。脉冲周期的测量是借助某一时钟频率确定的时钟脉冲来间接获得。若时钟频率为fc,测得的时钟脉冲数为m,则转速为n=60fc/(mp),n的单位为r/min。该法与测频法相反,适用于较低转速。
●M/T法:结合了M法和T法各自的特点,由定时器确定采样周期T,定时器的定时开始时刻总与脉冲编码器的第一个计数脉冲前沿保持一致,在T的期间内得到脉冲数m1,同时,另一个计数器对标准的时钟脉冲进行计数,当T定时结束时,只停止对脉冲编码器的计数,而T结束后脉冲编码器输出的第一个脉冲前沿时,才停止对标准时钟脉冲的计数,并得到计数值m2,其持续时间为Td=T+ΔT,其时序如图2-16所示。可以推导出此时转速可表示为n=60fsm1/(pm2),n的单位为r/min。M/T法是转速检测的较为理想的手段,可在宽的转速范围内实现高精度的测量,但其硬件和数据处理的软件相对复杂。
(2)位置检测 对位置检测的要求通常有两种:
1)判断被控对象是否到达某一位置:这类要求的实现较为简单,可采用光电式或电磁式位置传感器或接近开关,置于需要检测的位置,当被控对象到达时,输出一个开关信号给控制系统。
2)要准确检测被控对象某一时刻所达到的位置:这类要求的实现需要较为精密的转角或位移检测器。转角检测器有光电编码器、脉冲编码器、旋转变压器、圆形光栅等。位移检测器有感应同步机、光栅、差动变压器等。
●光电编码器:将360°范围内的角度进行绝对位置编码,并转换为数字量(见图2-17),由微机直接进行并行读入。
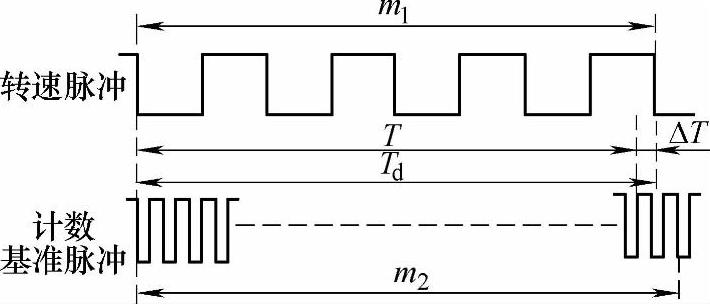
图2-16 M/T法的时序
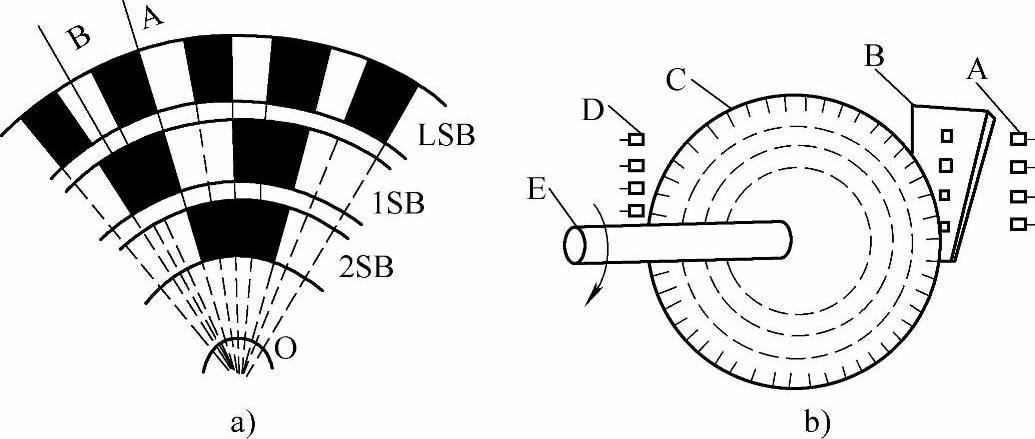
图2-17 绝对式光电编码器
a)码盘结构 b)编码器工作示意图
图2-17a中,LSB表示低数码道,1SB表示1数码道,2SB表示2数码道……。黑色部分表示高电平“1”,实际应用时,将这部分挖掉,让光源透射过去;白色部分表示低电平“0”,实际应用时,这部分遮断光源。编码盘的O轴可直接利用待测物的转轴。待测物的角位移可由各个码道上的二进制数表示,如OB线上的三个数码道所代表的二进制数码为“010”。图2-17b中,A是光敏器件,B是刻有窄缝的光栅,C是绝对式码盘,D是光源(发光二极管),E是旋转轴。绝对式码盘的主要性能参数是分辨率,即可检测的最小角度值或360°的等分数。若码盘的码道数为n,则其在码盘上的等分数为2n。当n=20时,则对应的最小角度单位为1.24″。
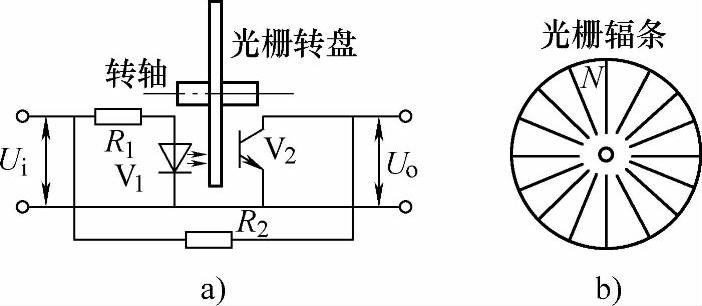
图2-18 脉冲编码器工作原理
a)工作原理图 b)光栅码盘
●脉冲编码器:其工作原理如图2-18所示。
图2-18a是工作原理图,图2-18b是其光栅转盘的结构。Ui为24V电源电压,N为光栅转盘上总的光栅辐条数,R1和R2为限流电阻器,而V1和V2则分别是发射端的发光二极管和接收端的光敏晶体管。当转轴受外部因素的影响而以某一转速n转动时,光栅转盘也随着以同样的转速转动。所以,在转轴转动一圈的时间内,接收端的光敏晶体管将接收到N个光脉冲信号,从而在其输出端输出N个电脉冲信号。由此可知,脉冲编码器输出的电信号Uo的频率f是由转轴的转速n决定的,有f=nN。该式决定了脉冲编码器输出信号的频率与转轴的转速n之间的关系。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






